How to Use DRV8825: Examples, Pinouts, and Specs
Introduction
The DRV8825 is a versatile microstepping driver for controlling bipolar stepper motors. With its adjustable current limiting, built-in over-current and over-temperature protection, and six microstep resolutions, it is suitable for a wide range of applications, including 3D printers, CNC machines, and robotics.
Explore Projects Built with DRV8825
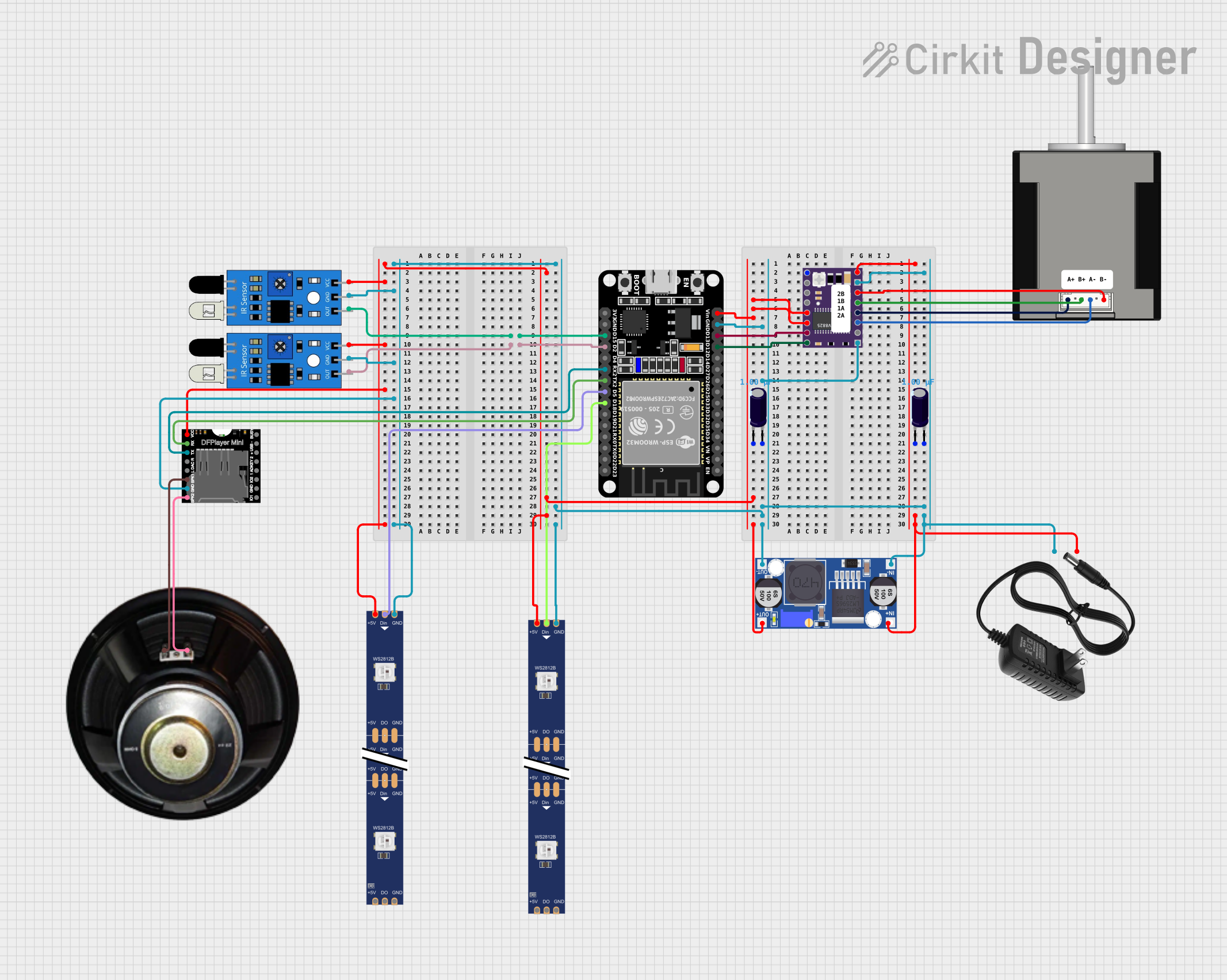
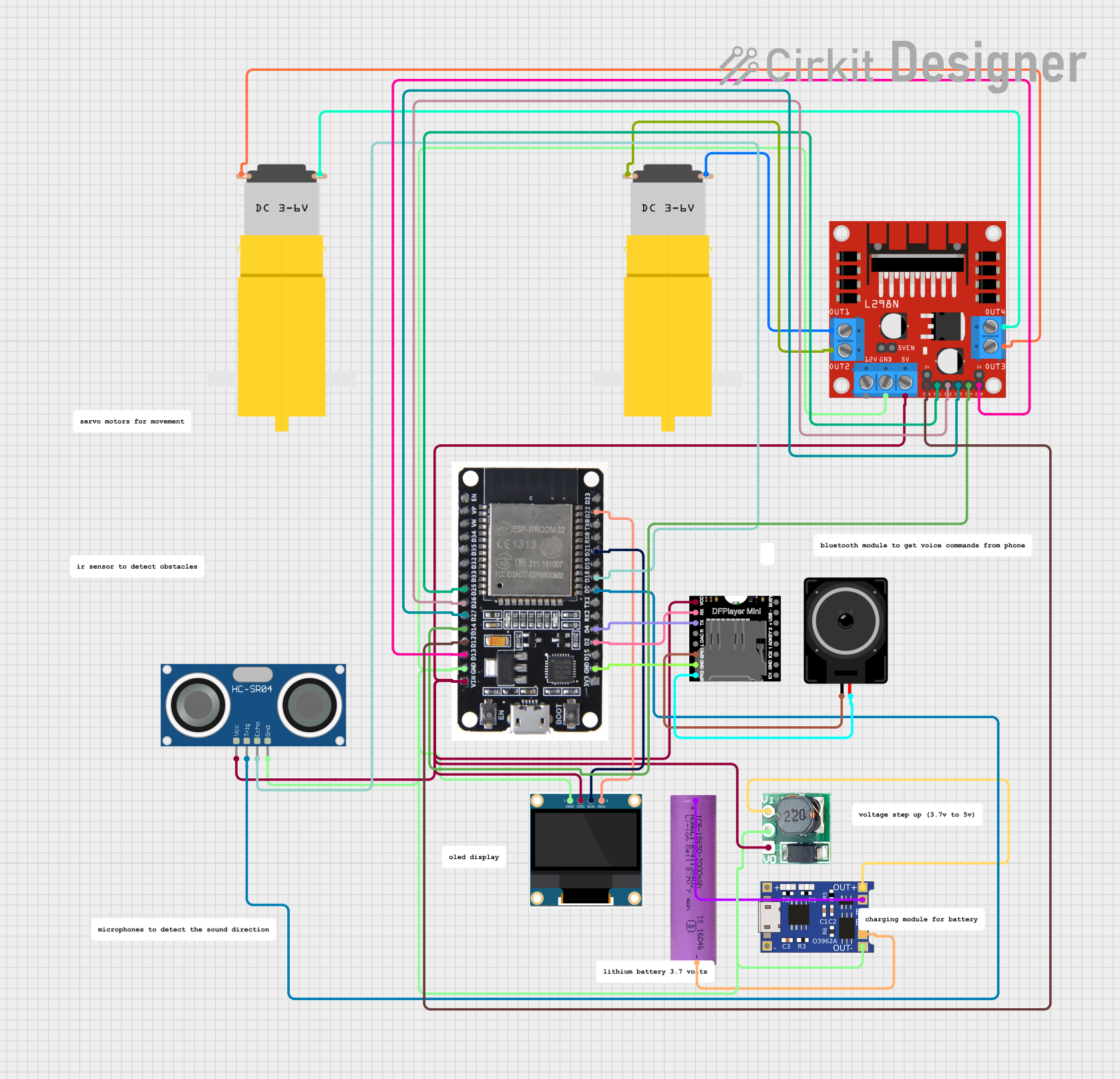
Explore Projects Built with DRV8825
Common Applications and Use Cases
- Precision control in 3D printers
- CNC machines for milling and laser cutting
- Robotic arms and actuators
- Automated equipment and animatronics
Technical Specifications
Key Technical Details
- Motor Supply Voltage (VM): 8.2 – 45 V
- Logic Supply Voltage (VDD): 2.5 – 5.25 V
- Output Current (per channel): 1.5 A (with sufficient additional cooling up to 2.2 A)
- Microstep Resolutions: Full, 1/2, 1/4, 1/8, 1/16, 1/32
- Thermal Overload Protection: Yes
- Under-voltage Lockout: Yes
- Overcurrent Protection: Yes
- Fault Indicator: Yes
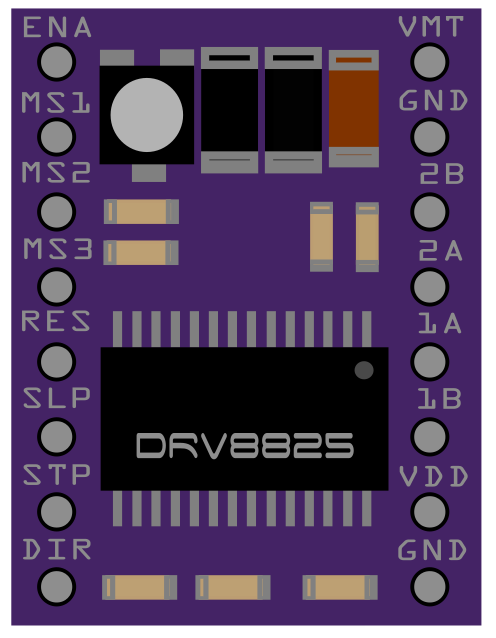
Pin Configuration and Descriptions
| Pin Name | Description |
|---|---|
| VM | Motor voltage supply (8.2 – 45 V) |
| GND | Ground connection |
| 2B, 2A | Motor coil 1 connections |
| 1A, 1B | Motor coil 2 connections |
| VDD | Logic voltage supply (2.5 – 5.25 V) |
| RESET | Resets the driver when pulled low |
| SLEEP | Puts the driver into a low-power sleep mode when pulled low |
| STEP | Logic input that advances the motor one step per pulse |
| DIR | Logic input that controls the direction of the motor |
| M0, M1, M2 | Microstep resolution selection inputs |
| FAULT | Logic output that indicates an overcurrent or thermal shutdown condition |
Usage Instructions
How to Use the Component in a Circuit
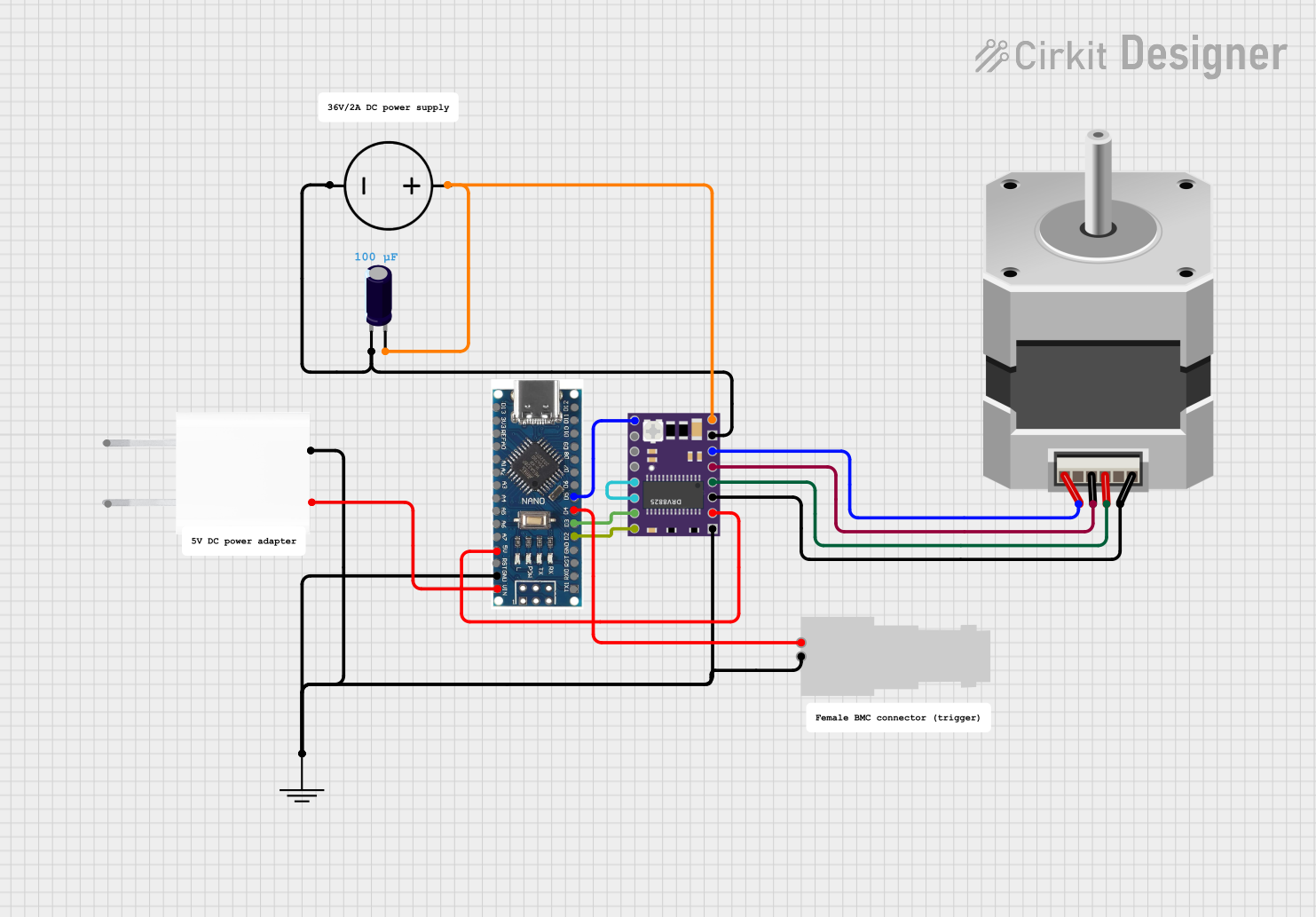
Power Connections: Connect the motor supply voltage (VM) to the motor power supply and the ground (GND) to the power supply ground. Connect VDD to the logic power supply (2.5 – 5.25 V).
Motor Connections: Connect the motor coils to the 2B, 2A, 1A, and 1B pins. Ensure the motor phases match the driver's outputs.
Control Inputs: Connect the STEP and DIR pins to the control signals, typically from a microcontroller like an Arduino UNO. The RESET and SLEEP pins can be connected to digital outputs or tied together if not used.
Microstep Selection: Set the microstep resolution by configuring the M0, M1, and M2 pins according to the truth table in the datasheet.
Current Limiting: Adjust the current limiting potentiometer on the DRV8825 board to match the current rating of your stepper motor.
Important Considerations and Best Practices
- Always ensure the power supply voltage and current ratings are within the specifications of the DRV8825.
- Configure the current limit to prevent damage to the motor due to overcurrent.
- Use appropriate decoupling capacitors to minimize voltage spikes on the power supply lines.
- Avoid disconnecting the motor while the driver is powered to prevent damage to the DRV8825.
- Provide adequate cooling if the driver is expected to handle currents near the upper limit of its capability.
Example Code for Arduino UNO
// Define the stepper motor connections and steps per revolution
#define DIR_PIN 2
#define STEP_PIN 3
#define STEPS_PER_REV 200
void setup() {
// Set the motor control pins as outputs
pinMode(DIR_PIN, OUTPUT);
pinMode(STEP_PIN, OUTPUT);
}
void loop() {
// Set the motor direction to clockwise
digitalWrite(DIR_PIN, HIGH);
// Move the motor one revolution
for (int i = 0; i < STEPS_PER_REV; i++) {
// Pulse the STEP pin to move the motor one step
digitalWrite(STEP_PIN, HIGH);
delayMicroseconds(1000); // Adjust the speed as necessary
digitalWrite(STEP_PIN, LOW);
delayMicroseconds(1000);
}
// Pause before changing direction
delay(1000);
// Set the motor direction to counterclockwise
digitalWrite(DIR_PIN, LOW);
// Move the motor one revolution in the other direction
for (int i = 0; i < STEPS_PER_REV; i++) {
digitalWrite(STEP_PIN, HIGH);
delayMicroseconds(1000);
digitalWrite(STEP_PIN, LOW);
delayMicroseconds(1000);
}
// Pause before the next revolution
delay(1000);
}
Troubleshooting and FAQs
Common Issues Users Might Face
- Motor not moving: Check power supply connections, ensure the current limit is correctly set, and verify that the motor coils are properly connected.
- Overheating: Ensure adequate cooling, and check if the current limit is set too high.
- Inconsistent movement: Verify microstep resolution settings and ensure the control signals are clean and without noise.
Solutions and Tips for Troubleshooting
- Motor Stalls or Misses Steps: Reduce the speed or acceleration of the motor, increase the current limit slightly, or check for mechanical obstructions.
- Driver Resets or Shuts Down: Check for overcurrent conditions or thermal overload. Add a heatsink or improve airflow around the DRV8825.
- Noise or Vibration: Experiment with different microstep resolutions or dampening materials to reduce resonance.
FAQs
Q: Can I run the DRV8825 without a heatsink? A: Yes, for low to moderate current levels. However, for currents approaching the upper limit, a heatsink is recommended.
Q: What is the maximum current the DRV8825 can handle? A: The DRV8825 can handle up to 1.5 A per channel without additional cooling. With sufficient cooling, it can handle up to 2.2 A per channel.
Q: How do I adjust the current limit on the DRV8825? A: Turn the potentiometer on the DRV8825 module while measuring the voltage on the REF pin or by following the VREF formula provided in the datasheet.
Q: What should I do if the FAULT pin goes high? A: Check for overcurrent or overheating conditions. Let the driver cool down and ensure that the current limit is set correctly before resuming operation.