How to Use KY-033 Line Tracking Sensor: Examples, Pinouts, and Specs
Introduction
The KY-033 Line Tracking Sensor is an electronic module designed for robotics and automation applications. It utilizes an infrared emitter and receiver pair to detect reflective surfaces, making it ideal for line-following robots or obstacle detection along predetermined paths. This sensor is particularly useful in educational robotics and DIY projects where path tracking is required.
Explore Projects Built with KY-033 Line Tracking Sensor

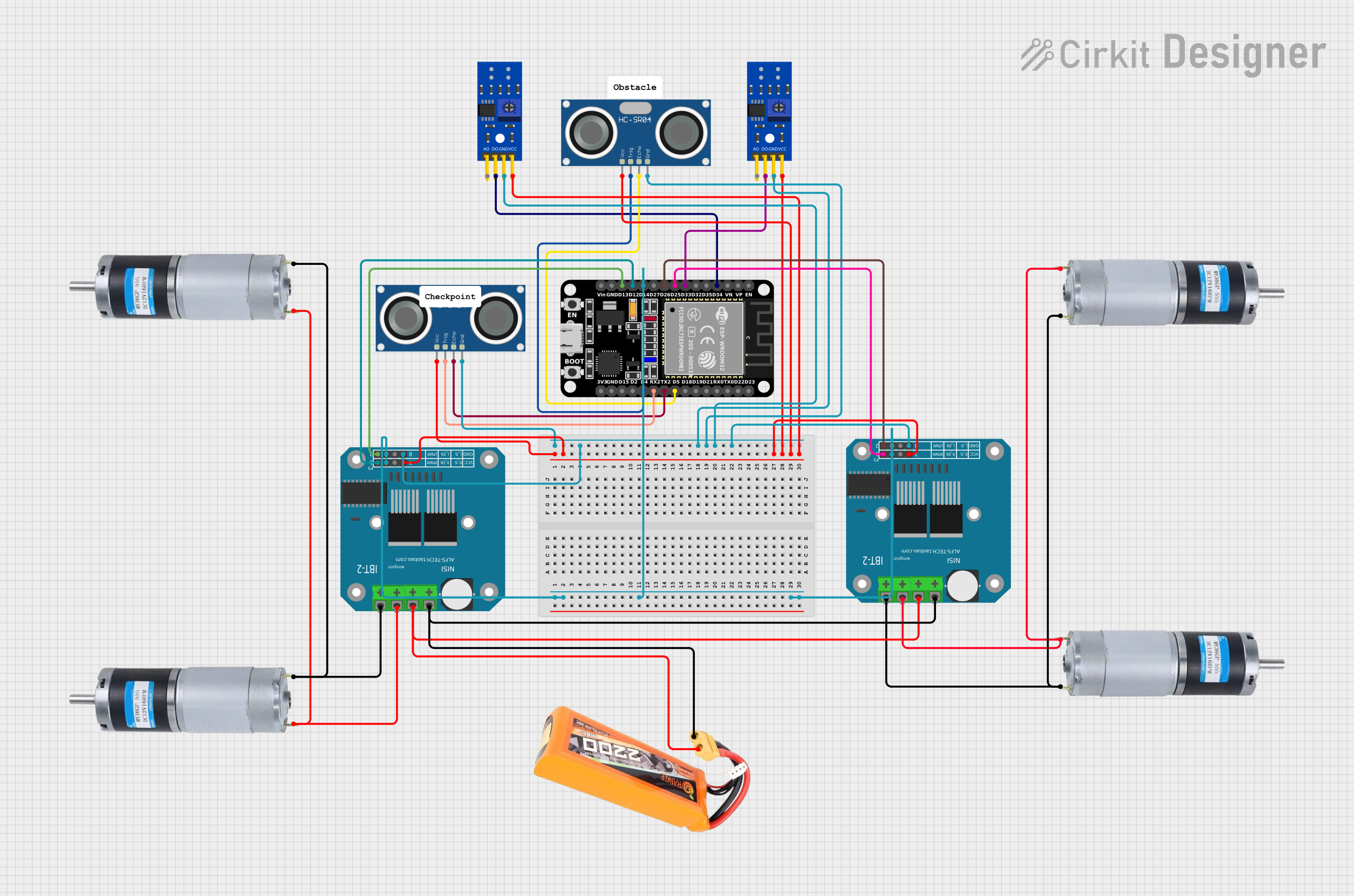
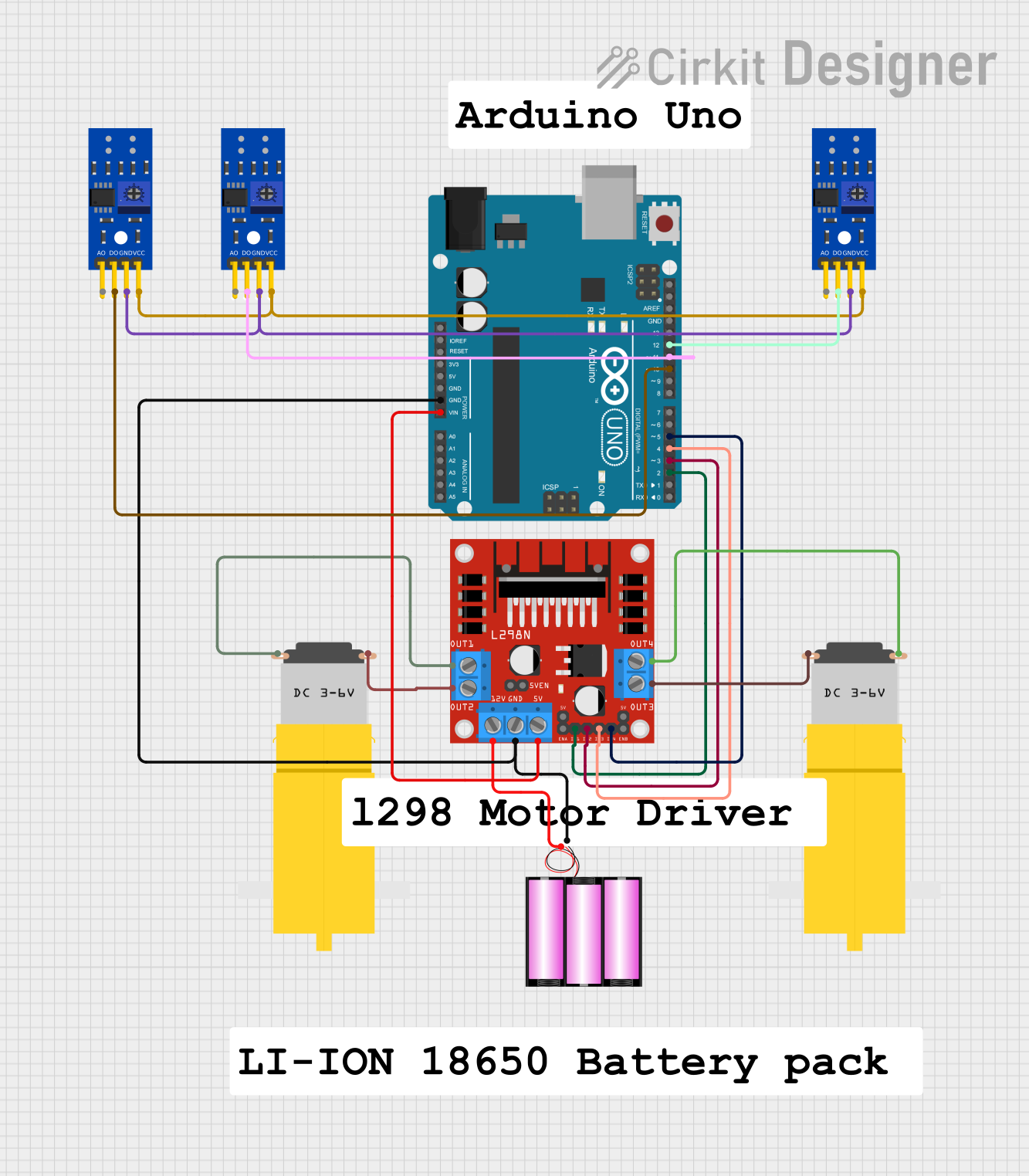
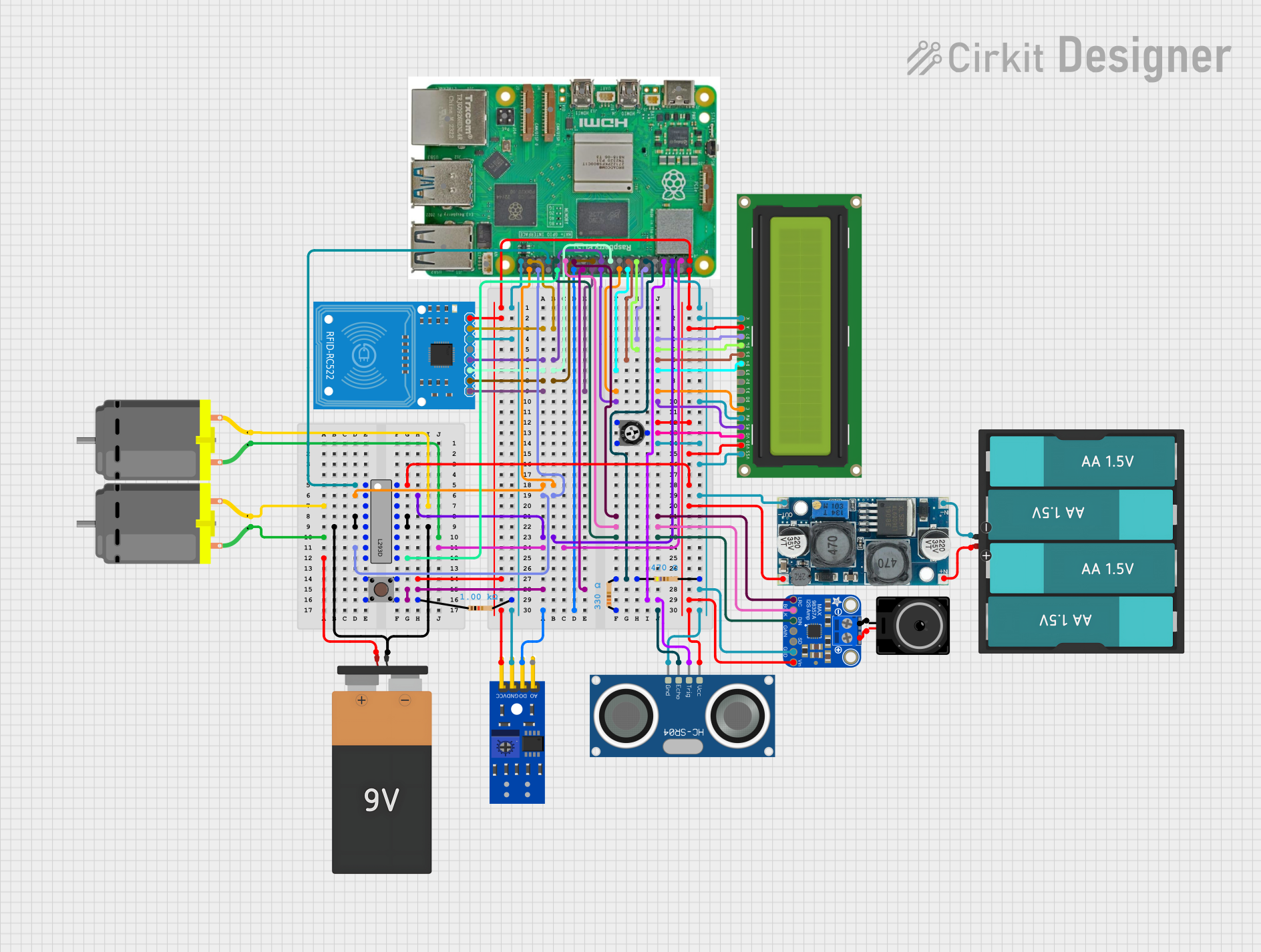
Explore Projects Built with KY-033 Line Tracking Sensor
Common Applications and Use Cases
- Line-following robots for competitions or educational purposes
- Automated guided vehicles (AGVs) in industrial settings
- Boundary detection for robotic lawnmowers or vacuum cleaners
- Positioning systems in conveyor belts or manufacturing lines
Technical Specifications
Key Technical Details
- Operating Voltage: 3.3V to 5V DC
- Current Consumption: 20mA (typical)
- Output Type: Digital signal
- Detection Distance: 2mm to 10mm
- Sensor Type: Infrared reflective
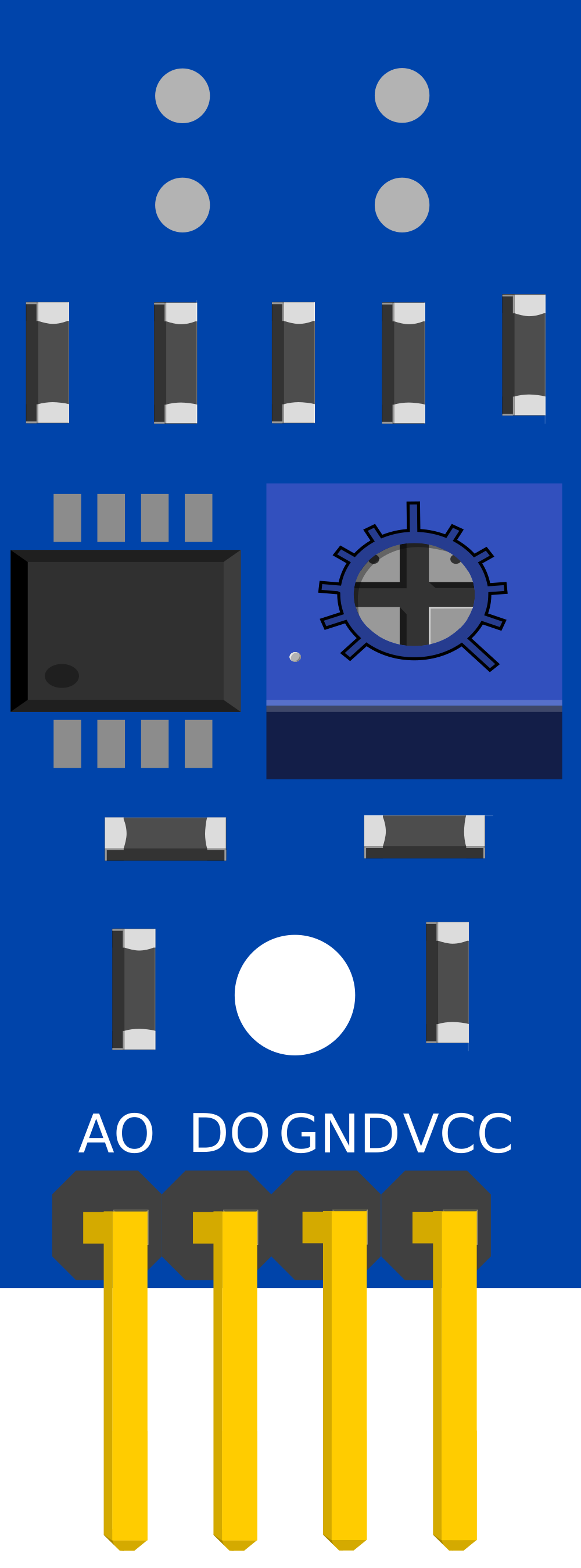
Pin Configuration and Descriptions
| Pin Number | Pin Name | Description |
|---|---|---|
| 1 | VCC | Power supply (3.3V to 5V DC) |
| 2 | GND | Ground connection |
| 3 | DO | Digital output (0 or 1) |
Usage Instructions
How to Use the Component in a Circuit
- Connect the VCC pin to the power supply (3.3V to 5V).
- Connect the GND pin to the ground of the power supply.
- Connect the DO pin to a digital input pin on a microcontroller, such as an Arduino UNO.
Important Considerations and Best Practices
- Ensure that the sensor is mounted at the correct height from the surface (2mm to 10mm) for optimal detection.
- Avoid exposing the sensor to direct sunlight or other strong infrared sources to prevent interference.
- Use a pull-up resistor if the microcontroller input pin does not have an internal pull-up feature.
- Test the sensor with different surface colors and materials to calibrate the sensitivity for your specific application.
Example Code for Arduino UNO
// KY-033 Line Tracking Sensor Example Code for Arduino UNO
const int LineSensorPin = 2; // Digital pin connected to the sensor's DO pin
void setup() {
pinMode(LineSensorPin, INPUT); // Initialize the line sensor pin as an input
Serial.begin(9600); // Start serial communication at 9600 baud rate
}
void loop() {
int lineState = digitalRead(LineSensorPin); // Read the sensor state (HIGH or LOW)
// Check if the sensor detects a line
if (lineState == LOW) {
// Line detected
Serial.println("Line Detected!");
} else {
// No line detected
Serial.println("No Line Detected.");
}
delay(200); // Wait for 200 milliseconds before reading again
}
Troubleshooting and FAQs
Common Issues Users Might Face
- Sensor not detecting line: Ensure that the sensor is properly connected and the surface is within the detection range.
- False detections: Check for ambient infrared light interference and adjust the sensor's position or orientation.
- Inconsistent readings: Verify that the sensor is mounted stably and is not subject to vibrations or sudden movements.
Solutions and Tips for Troubleshooting
- If the sensor is not functioning, check all connections and ensure that the power supply is within the specified voltage range.
- Calibrate the sensor by testing it on different surfaces and adjusting the height if necessary.
- Use a multimeter to check the voltage levels at the VCC and DO pins to ensure proper operation.
FAQs
Q: Can the KY-033 sensor detect any color of line? A: The sensor is best at detecting lines that have a high contrast with the background, typically dark lines on a light surface.
Q: What is the output of the sensor when a line is detected? A: The digital output (DO) pin will typically output a LOW signal when a line is detected.
Q: How can I adjust the sensitivity of the sensor? A: The KY-033 sensor usually comes with a potentiometer that can be adjusted to change the sensitivity. Rotate the potentiometer while monitoring the sensor's output until the desired sensitivity is achieved.
Q: Is it possible to use the KY-033 sensor with a 3.3V system? A: Yes, the sensor can operate at a voltage as low as 3.3V, making it compatible with 3.3V systems like some ARM-based microcontrollers.