How to Use Servo MG996R: Examples, Pinouts, and Specs
Introduction
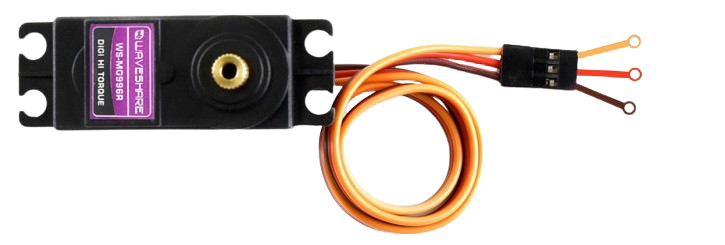
The MG996R is a high-torque servo motor widely used in robotics, automation, and remote-controlled systems. It is equipped with a durable metal gear train, ensuring long-lasting performance even under high-stress conditions. The servo provides precise control over angular position, making it ideal for applications requiring strong, reliable, and repeatable movement. Its versatility and robust design make it a popular choice for hobbyists and professionals alike.
Explore Projects Built with Servo MG996R
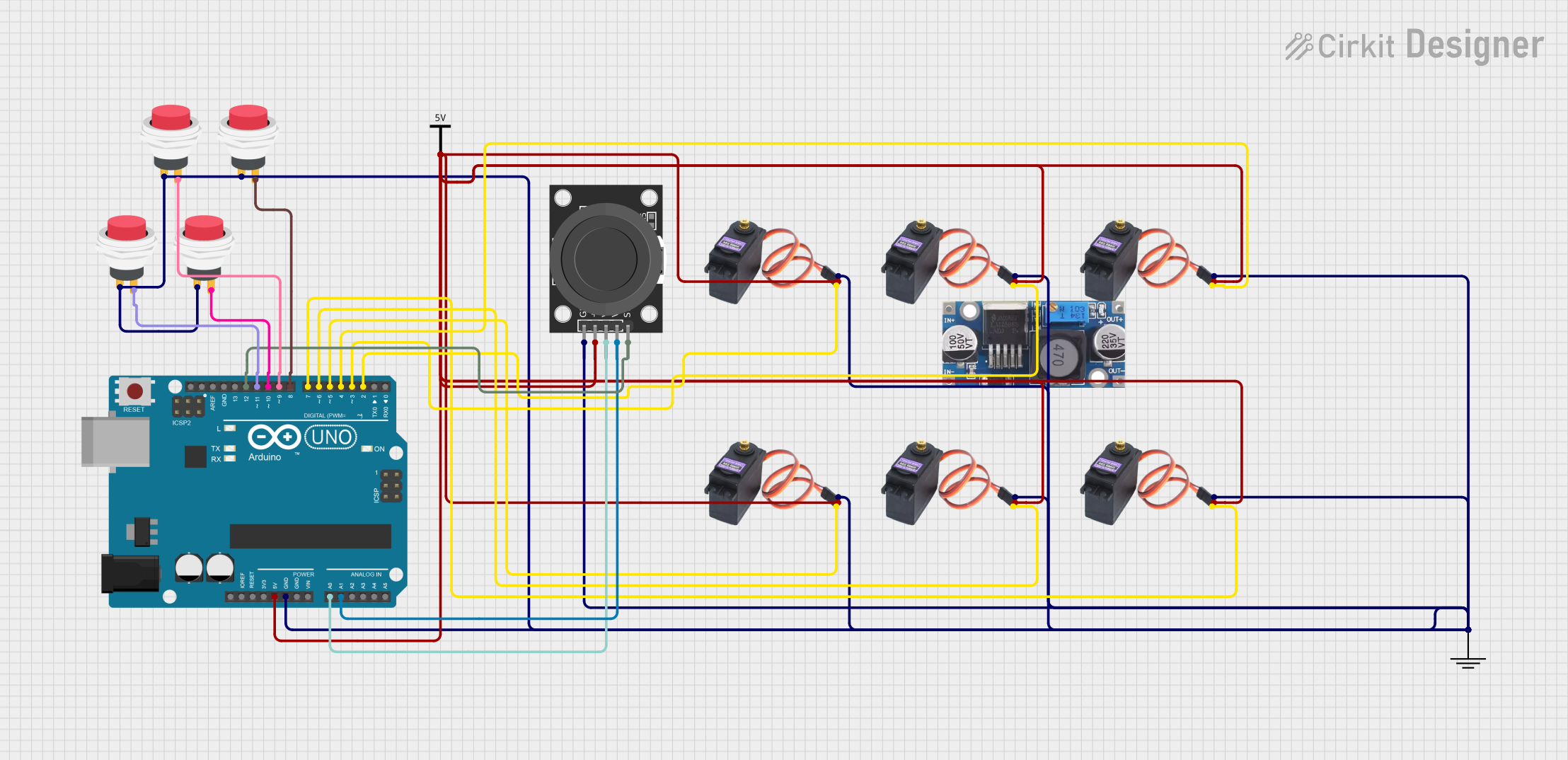
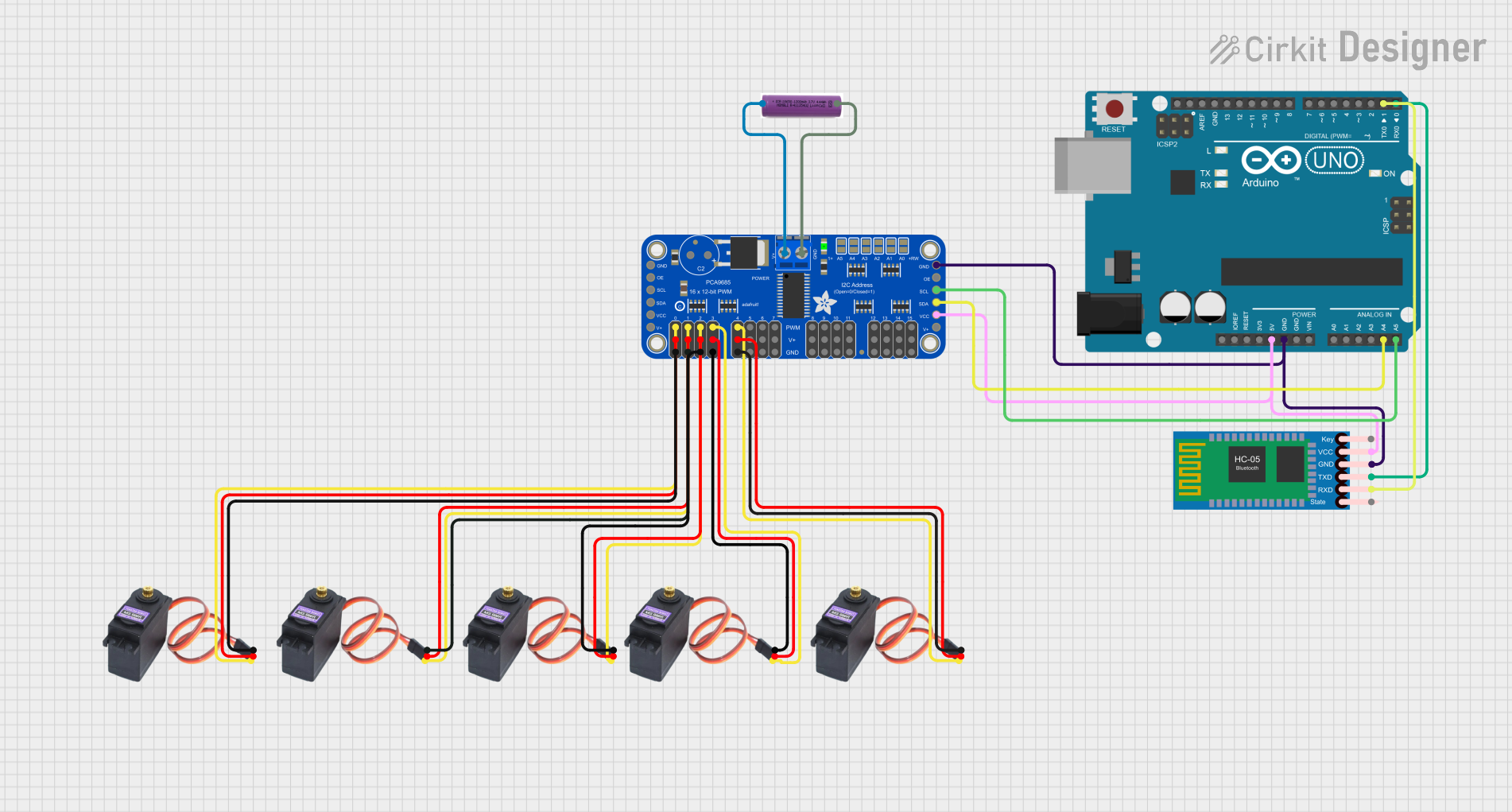
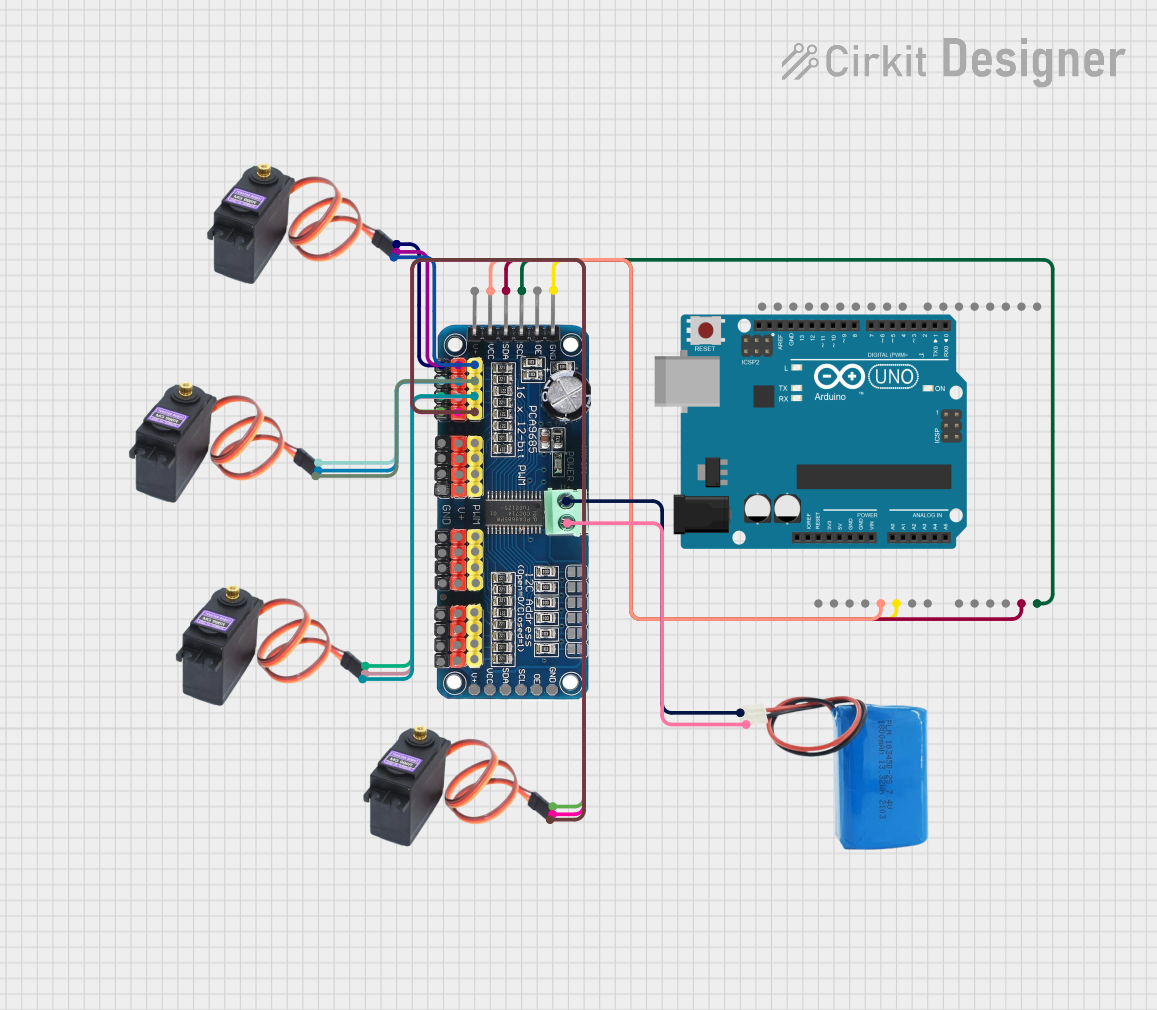

Explore Projects Built with Servo MG996R
Common Applications
- Robotic arms and grippers
- RC vehicles (cars, boats, planes)
- Pan-tilt camera systems
- Automated mechanisms in industrial systems
- DIY projects requiring precise angular motion
Technical Specifications
Below are the key technical details of the MG996R servo motor:
| Parameter | Value |
|---|---|
| Operating Voltage | 4.8V to 7.2V |
| Stall Torque | 9.4 kg·cm (4.8V), 11 kg·cm (6V) |
| Operating Speed | 0.19 s/60° (4.8V), 0.14 s/60° (6V) |
| Gear Type | Metal |
| Weight | 55g |
| Dimensions | 40.7mm x 19.7mm x 42.9mm |
| Control Signal | PWM (Pulse Width Modulation) |
| PWM Pulse Range | 500µs to 2500µs |
| Rotation Angle | 0° to 180° |
| Connector Type | 3-pin female header (Dupont) |
Pin Configuration
The MG996R servo motor has a 3-pin connector. Below is the pinout description:
| Pin | Wire Color | Description |
|---|---|---|
| 1 | Brown | Ground (GND) |
| 2 | Red | Power Supply (VCC) |
| 3 | Orange | Signal (PWM control input) |
Usage Instructions
How to Use the MG996R in a Circuit
- Power Supply: Connect the red wire to a power source (4.8V to 7.2V). Ensure the power supply can provide sufficient current (at least 2A) to handle the servo's peak load.
- Ground Connection: Connect the brown wire to the ground (GND) of your circuit.
- Signal Input: Connect the orange wire to a PWM-capable pin of your microcontroller (e.g., Arduino UNO).
Important Considerations
- Power Requirements: The MG996R can draw significant current, especially under load. Use a separate power supply for the servo to avoid overloading your microcontroller.
- PWM Signal: The servo responds to PWM signals with a pulse width between 500µs (0°) and 2500µs (180°). A 1500µs pulse corresponds to the neutral position (90°).
- Mechanical Limits: Do not force the servo beyond its physical rotation limits (0° to 180°) to avoid damaging the gears.
- Heat Management: Prolonged operation under heavy load may cause the servo to heat up. Allow it to cool periodically to prevent overheating.
Example: Controlling the MG996R with Arduino UNO
Below is an example code to control the MG996R servo motor using an Arduino UNO:
#include <Servo.h> // Include the Servo library
Servo myServo; // Create a Servo object to control the MG996R
void setup() {
myServo.attach(9); // Attach the servo to pin 9 on the Arduino
}
void loop() {
myServo.write(0); // Move the servo to 0 degrees
delay(1000); // Wait for 1 second
myServo.write(90); // Move the servo to 90 degrees
delay(1000); // Wait for 1 second
myServo.write(180); // Move the servo to 180 degrees
delay(1000); // Wait for 1 second
}
Best Practices
- Use a capacitor (e.g., 100µF) across the power supply terminals to stabilize voltage.
- Avoid sudden, large changes in position to reduce stress on the servo.
- Test the servo without load before integrating it into your project.
Troubleshooting and FAQs
Common Issues and Solutions
Servo Not Moving
- Cause: Insufficient power supply.
- Solution: Ensure the power source provides at least 2A of current.
Servo Jittering
- Cause: Unstable PWM signal or noisy power supply.
- Solution: Use a decoupling capacitor across the power supply and verify the PWM signal.
Overheating
- Cause: Prolonged operation under heavy load.
- Solution: Allow the servo to cool periodically and avoid overloading it.
Limited Rotation
- Cause: Incorrect PWM signal range.
- Solution: Ensure the PWM pulse width is between 500µs and 2500µs.
FAQs
Q: Can the MG996R rotate continuously?
A: No, the MG996R is a standard servo with a rotation range of 0° to 180°. For continuous rotation, use a modified or continuous rotation servo.
Q: Can I power the MG996R directly from the Arduino?
A: It is not recommended, as the Arduino cannot supply enough current for the servo under load. Use an external power source.
Q: How do I know if the servo is receiving a signal?
A: The servo will make a slight noise or move slightly when powered and receiving a valid PWM signal.
Q: Can I use the MG996R for high-speed applications?
A: The MG996R is designed for high torque rather than high speed. For faster movement, consider a servo with a higher operating speed.