How to Use DC MCB 10A: Examples, Pinouts, and Specs

Introduction
The CHINT NB1-63DC is a DC Miniature Circuit Breaker (MCB) rated for 10 Amperes. It is specifically designed to protect electrical circuits from overloads and short circuits in direct current (DC) applications. This component ensures the safety and reliability of DC systems by interrupting the current flow when abnormal conditions are detected.
Explore Projects Built with DC MCB 10A
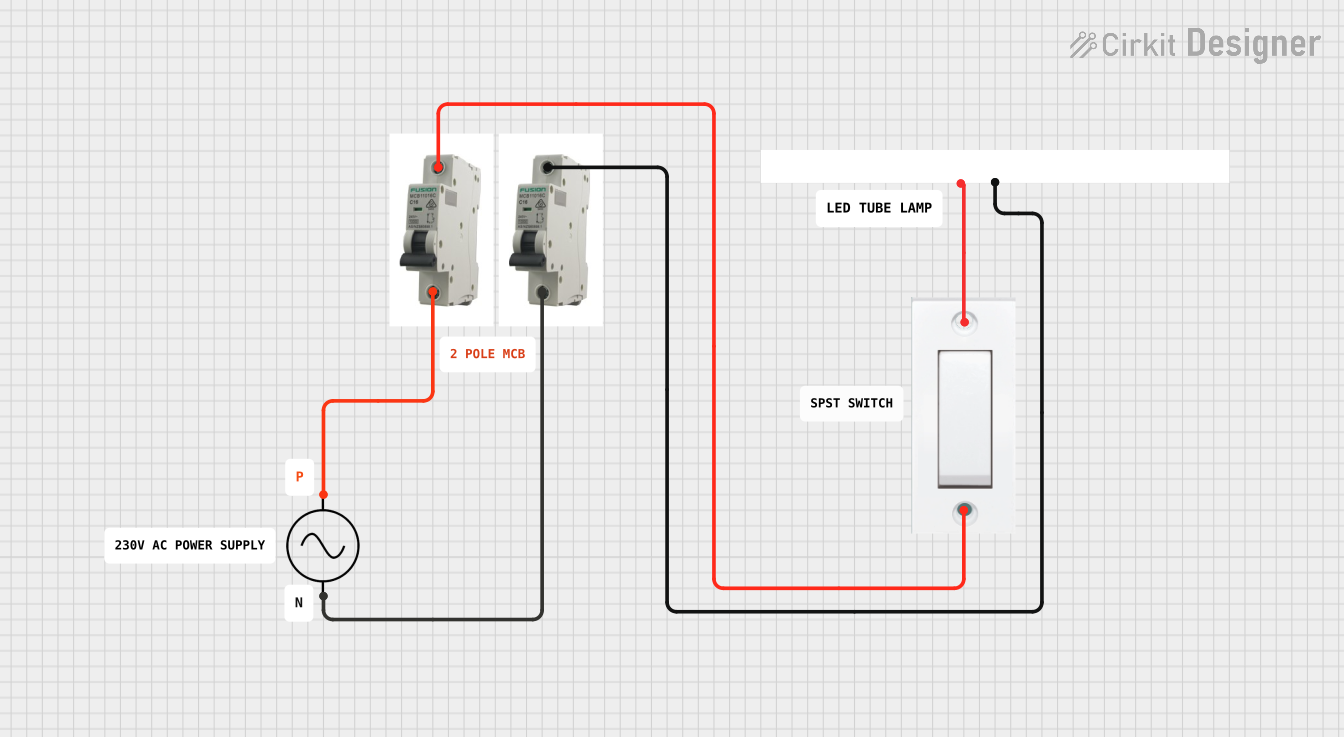
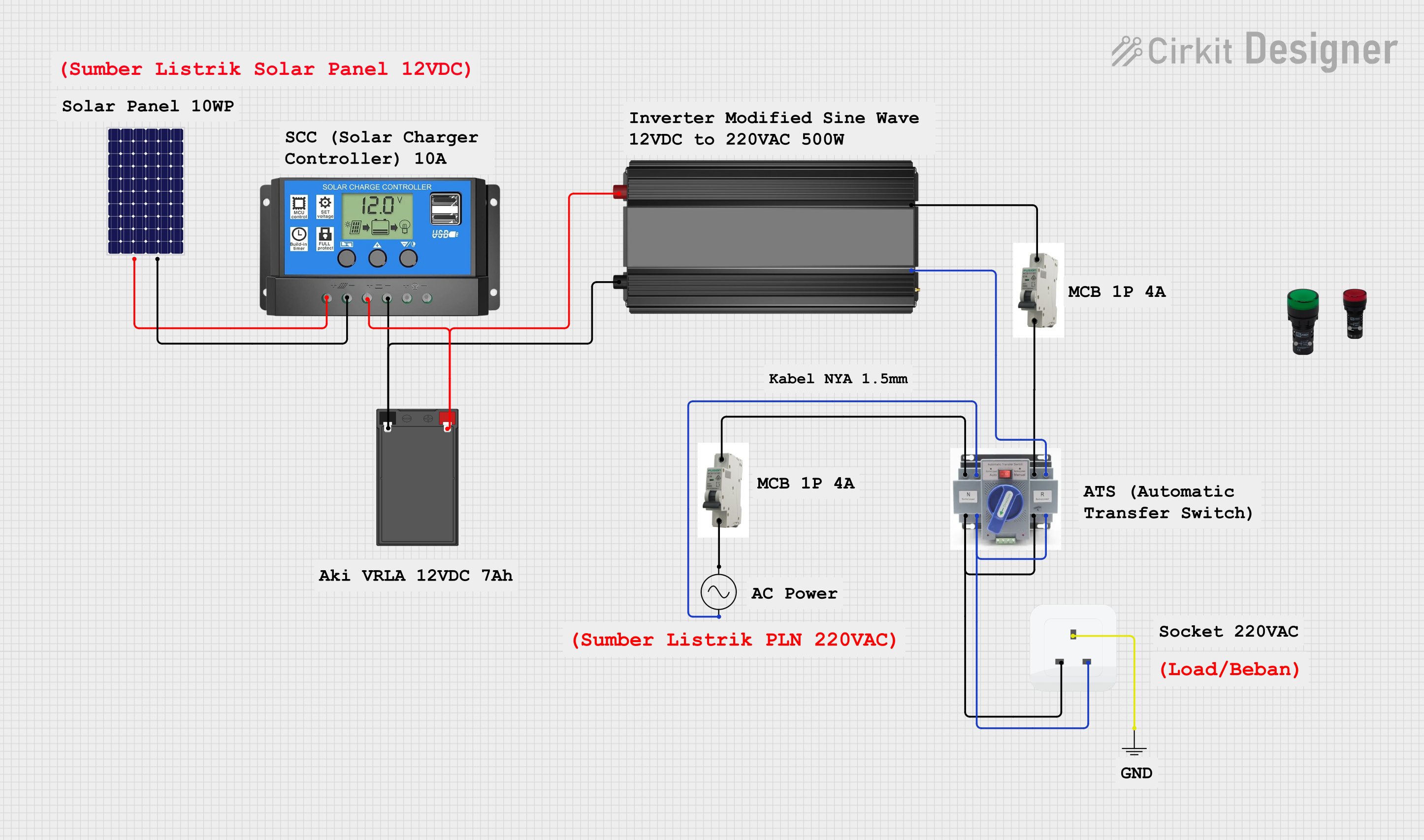
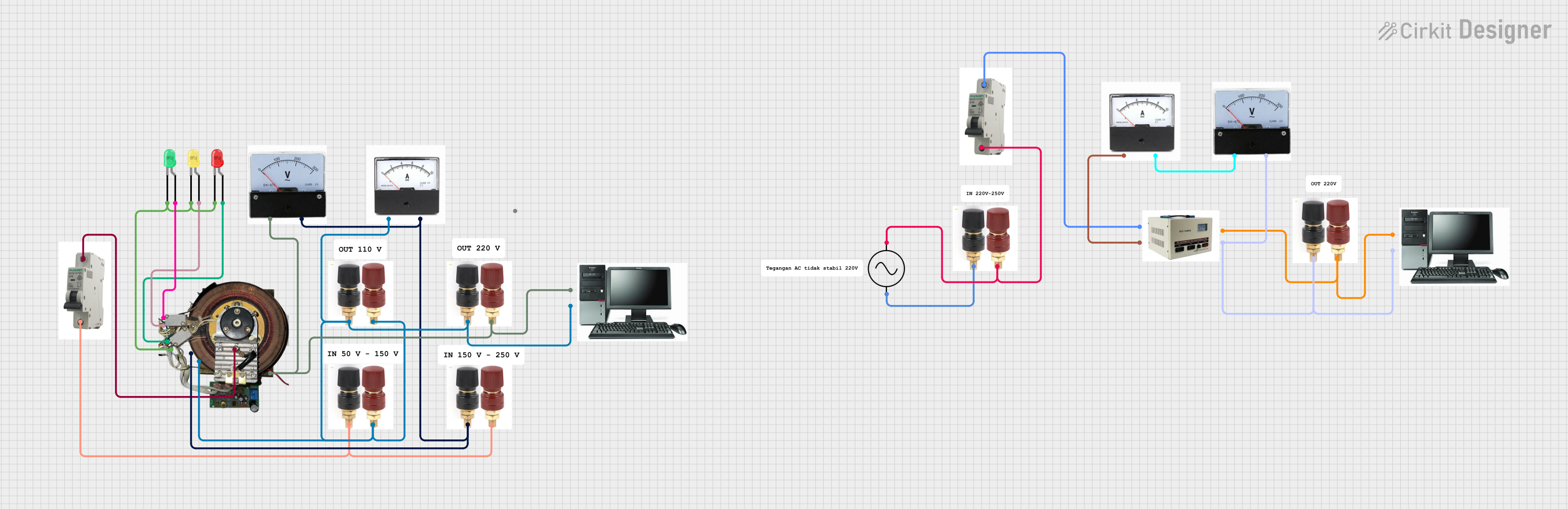
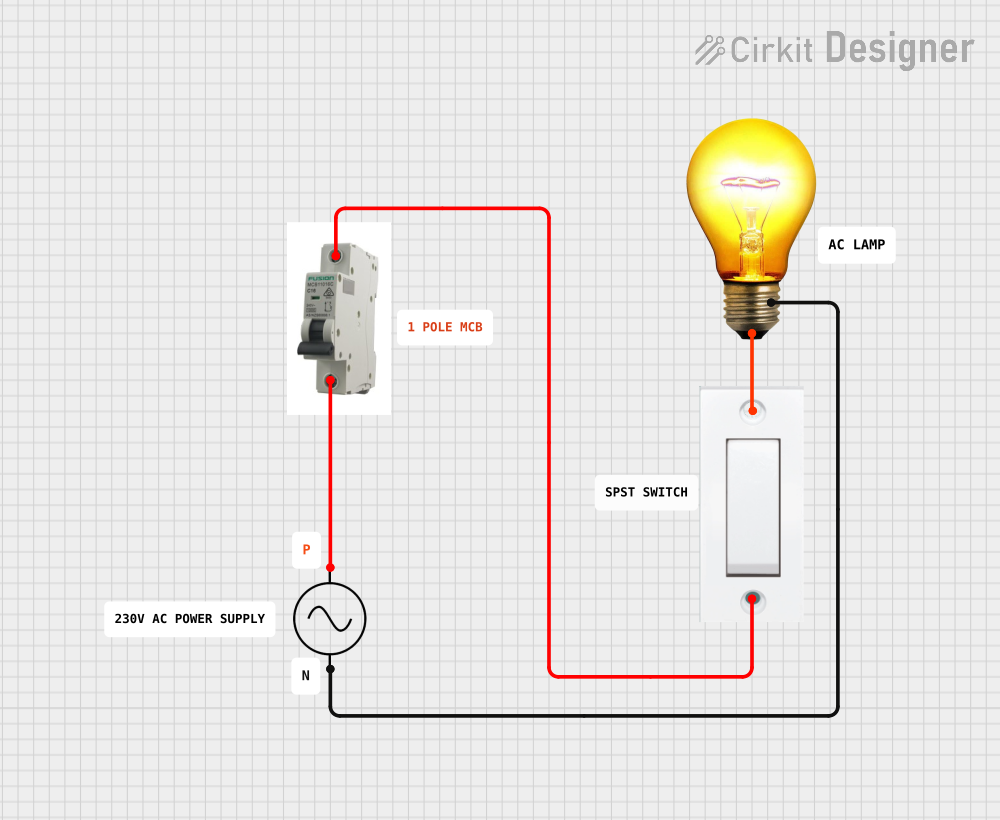
Explore Projects Built with DC MCB 10A
Common Applications and Use Cases
- Solar power systems and photovoltaic (PV) arrays
- Electric vehicle (EV) charging stations
- Battery banks and energy storage systems
- DC distribution panels in industrial and commercial setups
- Telecommunications equipment
Technical Specifications
The following table outlines the key technical details of the CHINT NB1-63DC DC MCB:
| Parameter | Specification |
|---|---|
| Manufacturer | CHINT |
| Part ID | NB1-63DC |
| Rated Current | 10 A |
| Rated Voltage | 250 V DC (single pole) / 500 V DC (double pole) |
| Breaking Capacity | 6 kA |
| Number of Poles | 1P, 2P |
| Tripping Curve | C Curve |
| Operating Temperature | -5°C to +40°C |
| Mounting Type | DIN Rail (35 mm) |
| Standards Compliance | IEC/EN 60947-2, IEC/EN 60898-2 |
Pin Configuration and Descriptions
The CHINT NB1-63DC MCB does not have traditional "pins" but instead features terminal connections for input and output wiring. Below is a description of the terminals:
| Terminal | Description |
|---|---|
| Line (Input) | Connects to the positive terminal of the DC power source. |
| Load (Output) | Connects to the positive terminal of the load. |
| Neutral | Not applicable for single-pole configurations. |
Usage Instructions
How to Use the Component in a Circuit
Mounting the MCB:
- Secure the MCB onto a standard 35 mm DIN rail in your distribution panel or enclosure.
- Ensure the MCB is firmly locked into place to prevent movement during operation.
Wiring the MCB:
- Connect the Line (Input) terminal to the positive terminal of the DC power source.
- Connect the Load (Output) terminal to the positive terminal of the load.
- Use appropriately rated wires for the current and voltage of your system.
Operation:
- Switch the MCB to the "ON" position to allow current flow.
- In case of an overload or short circuit, the MCB will trip to the "OFF" position, interrupting the circuit.
Important Considerations and Best Practices
- Polarity: Ensure correct polarity when connecting the MCB, as it is designed for DC applications.
- Wire Sizing: Use wires with appropriate gauge ratings to handle the rated current (10 A) and voltage.
- Ambient Temperature: Operate the MCB within the specified temperature range (-5°C to +40°C) to avoid performance degradation.
- Periodic Testing: Regularly test the MCB by manually tripping it to ensure proper functionality.
- Avoid Overloading: Do not exceed the rated current (10 A) or voltage (250 V DC for single pole, 500 V DC for double pole).
Example Circuit with Arduino UNO
While the DC MCB is not directly interfaced with an Arduino UNO, it can be used in circuits powered by DC sources controlled by the Arduino. Below is an example of how the MCB might be integrated into a DC motor control circuit:
/*
Example: Controlling a DC motor with an Arduino UNO and protecting the circuit
using a CHINT NB1-63DC 10A MCB.
This code demonstrates basic motor control using a relay module.
The MCB is placed between the DC power source and the motor for protection.
*/
const int relayPin = 7; // Pin connected to the relay module
void setup() {
pinMode(relayPin, OUTPUT); // Set relay pin as output
digitalWrite(relayPin, LOW); // Ensure relay is off at startup
}
void loop() {
// Turn on the motor
digitalWrite(relayPin, HIGH); // Activate relay
delay(5000); // Run motor for 5 seconds
// Turn off the motor
digitalWrite(relayPin, LOW); // Deactivate relay
delay(5000); // Wait for 5 seconds before restarting
}
Note: The MCB is not directly controlled by the Arduino but is used to protect the circuit from overloads or short circuits.
Troubleshooting and FAQs
Common Issues Users Might Face
MCB Trips Frequently:
- Cause: Overload or short circuit in the connected circuit.
- Solution: Check the load current and ensure it does not exceed 10 A. Inspect the circuit for short circuits or faulty components.
MCB Does Not Trip During Faults:
- Cause: Faulty MCB or incorrect wiring.
- Solution: Verify the wiring connections and test the MCB manually. Replace the MCB if it is defective.
Difficulty in Mounting the MCB:
- Cause: Incorrect DIN rail size or improper alignment.
- Solution: Ensure the DIN rail is 35 mm wide and properly aligned with the MCB mounting clips.
MCB Overheats During Operation:
- Cause: Loose terminal connections or excessive current.
- Solution: Tighten all terminal screws and ensure the load current does not exceed the rated 10 A.
Solutions and Tips for Troubleshooting
- Always disconnect the power supply before inspecting or troubleshooting the MCB.
- Use a multimeter to measure the current and voltage in the circuit to identify potential issues.
- If the MCB trips repeatedly, consider upgrading to a higher-rated MCB if the load requirements exceed 10 A.
By following these guidelines, the CHINT NB1-63DC DC MCB can be effectively used to protect your DC circuits and ensure safe operation.