How to Use KK 2.1.5 FLIGHT CONTROLLER: Examples, Pinouts, and Specs
Introduction
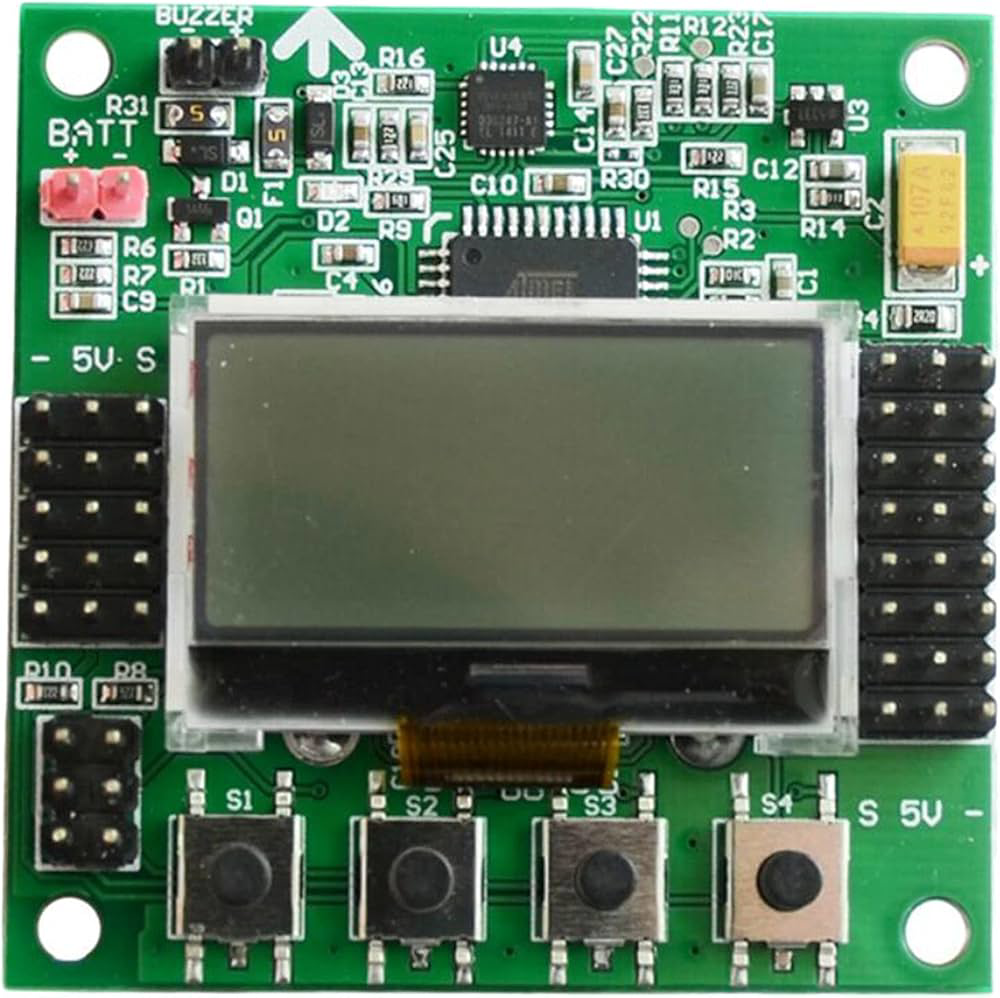
The KK 2.1.5 Flight Controller is an advanced electronic device designed for stabilizing and managing the flight of multirotor aircraft, commonly known as drones. It integrates sensor data and user inputs to provide real-time adjustments to the motor outputs, ensuring stable flight and responsive control. This flight controller is popular among hobbyists and enthusiasts for its ease of use and robust feature set.
Explore Projects Built with KK 2.1.5 FLIGHT CONTROLLER



Explore Projects Built with KK 2.1.5 FLIGHT CONTROLLER
Common Applications and Use Cases
- Hobbyist and DIY multirotor drones
- First Person View (FPV) racing drones
- Aerial photography and videography platforms
- Educational projects and research
Technical Specifications
Key Technical Details
- Input Voltage: 4.8V - 6.0V
- Sensor: InvenSense MPU-6050 6-axis gyro and accelerometer
- Processor: Atmega644PA
- Firmware: Upgradable
- Signal Frequency: 1 kHz
- Output Power for Motors: 50Hz PWM
- Weight: 21 grams
- Dimensions: 50.5mm x 50.5mm x 12mm
Pin Configuration and Descriptions
| Pin Number | Description | Type |
|---|---|---|
| 1 | Ground | Power |
| 2 | +5V Input | Power |
| 3-8 | Motor Outputs | Signal |
| 9-12 | M1-M4 Inputs (Receiver) | Signal |
| 13 | Aileron Input (Receiver) | Signal |
| 14 | Elevator Input (Receiver) | Signal |
| 15 | Throttle Input (Receiver) | Signal |
| 16 | Rudder Input (Receiver) | Signal |
| 17 | Auxiliary 1 Input (Receiver) | Signal |
| 18 | Auxiliary 2 Input (Receiver) | Signal |
| 19 | Ground | Power |
| 20 | +5V Output | Power |
Usage Instructions
How to Use the Component in a Circuit
- Power Supply: Connect a 4.8V to 6.0V power source to the +5V Input (Pin 2) and Ground (Pin 1) to power the KK 2.1.5 Flight Controller.
- Receiver Connections: Connect the receiver outputs to the corresponding inputs on the flight controller (Pins 9-18).
- Motor Connections: Connect the motor electronic speed controllers (ESCs) to the Motor Outputs (Pins 3-8).
- Calibration: Before the first flight, calibrate the sensors through the onboard menu system.
- Mounting: Secure the flight controller to the drone frame, ensuring it is level and free from vibration.
Important Considerations and Best Practices
- Vibration Isolation: Use vibration-damping materials to mount the flight controller to minimize the impact of vibrations on sensor readings.
- Firmware Updates: Regularly check for firmware updates to ensure optimal performance and access to new features.
- Configuration: Use the onboard buttons and display to configure the flight controller settings according to your specific drone setup.
- Safety: Always perform pre-flight checks and ensure the area is clear before testing or flying your drone.
Troubleshooting and FAQs
Common Issues
- Motors not spinning: Check connections and ensure that the ESCs are properly calibrated.
- Drone not stabilizing: Verify that the sensors are calibrated and that the flight controller is mounted correctly.
- Loss of control: Ensure that the receiver is bound to the transmitter and that there are no signal interferences.
Solutions and Tips for Troubleshooting
- Re-calibrate the sensors if the drone behaves erratically.
- Inspect wiring for any loose connections or damaged wires.
- Check the battery to ensure it is properly charged and connected.
- Update the firmware to the latest version to fix known issues.
FAQs
Q: Can I use a different type of receiver with the KK 2.1.5? A: Yes, the KK 2.1.5 is compatible with various receivers as long as they can connect to the standard input pins.
Q: How do I update the firmware on the KK 2.1.5? A: Firmware updates can be performed using a USBasp AVR programming device and the appropriate software tool.
Q: What should I do if the flight controller does not power on? A: Check the power supply connections, ensure the battery is charged, and inspect the board for any signs of damage.
For further assistance, consult the KK 2.1.5 Flight Controller community forums and support resources.
(Note: This documentation is a generic guide and may not cover all aspects of the KK 2.1.5 Flight Controller. Always refer to the manufacturer's official documentation for the most accurate and detailed information.)