How to Use STorM32 micro motor v252E: Examples, Pinouts, and Specs
Introduction
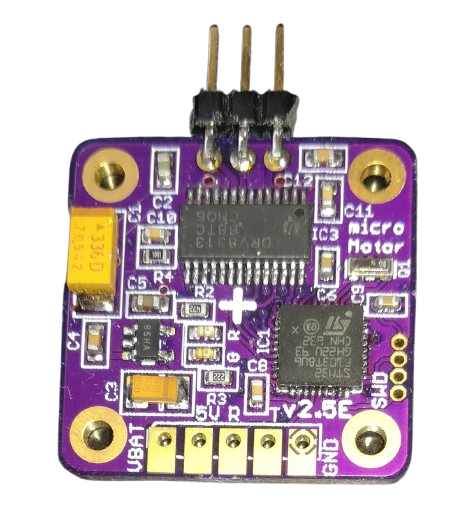
The STorM32 Micro Motor v252E, manufactured by Olliw42 (Part ID: TOP), is a compact and lightweight brushless motor designed for high-performance applications. It is engineered to deliver precise and efficient operation, making it ideal for use in drones, gimbals, and other robotics systems requiring advanced motion control. Its compatibility with various flight controllers and its advanced control capabilities make it a versatile choice for both hobbyists and professionals.
Explore Projects Built with STorM32 micro motor v252E
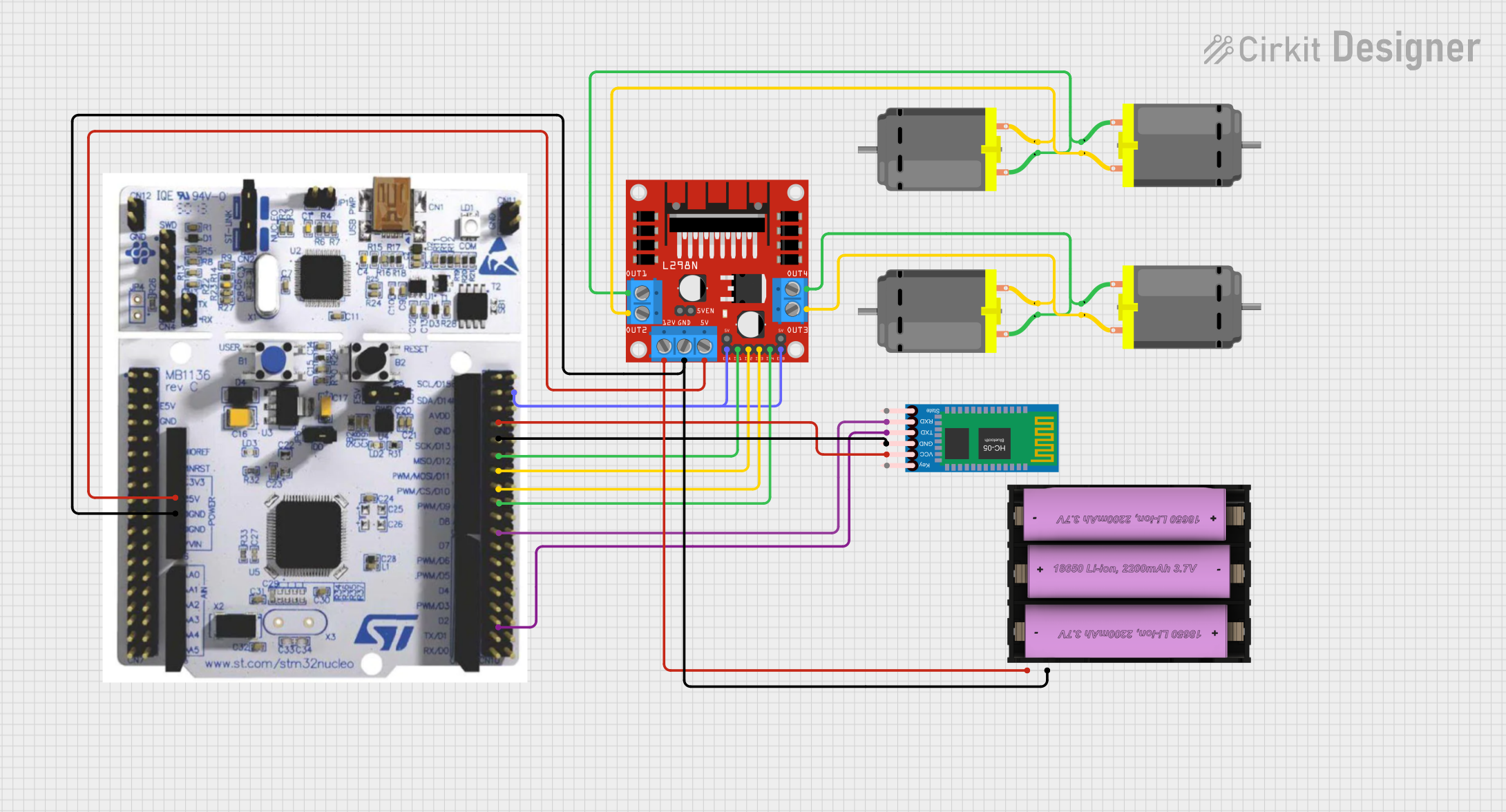
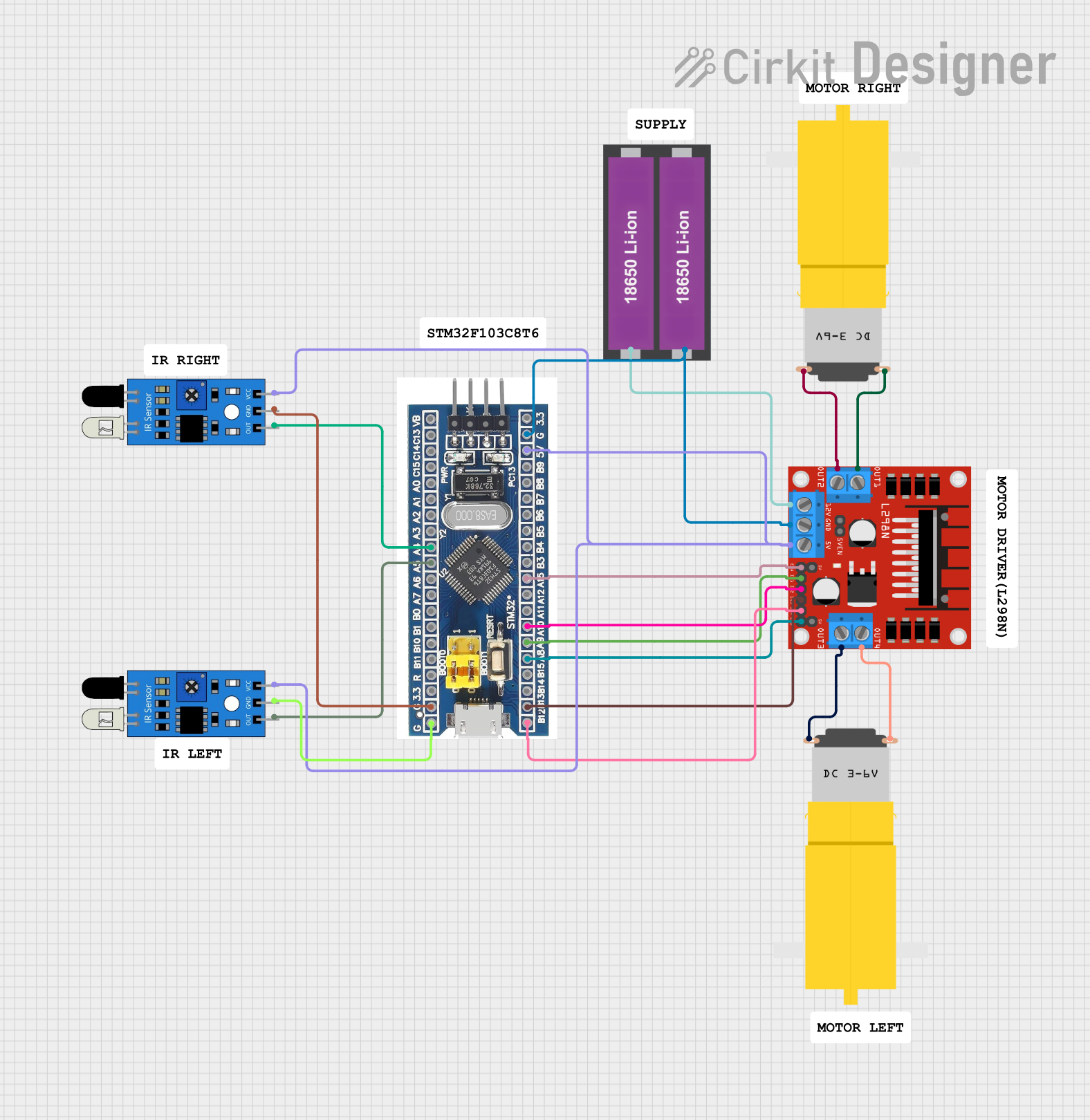
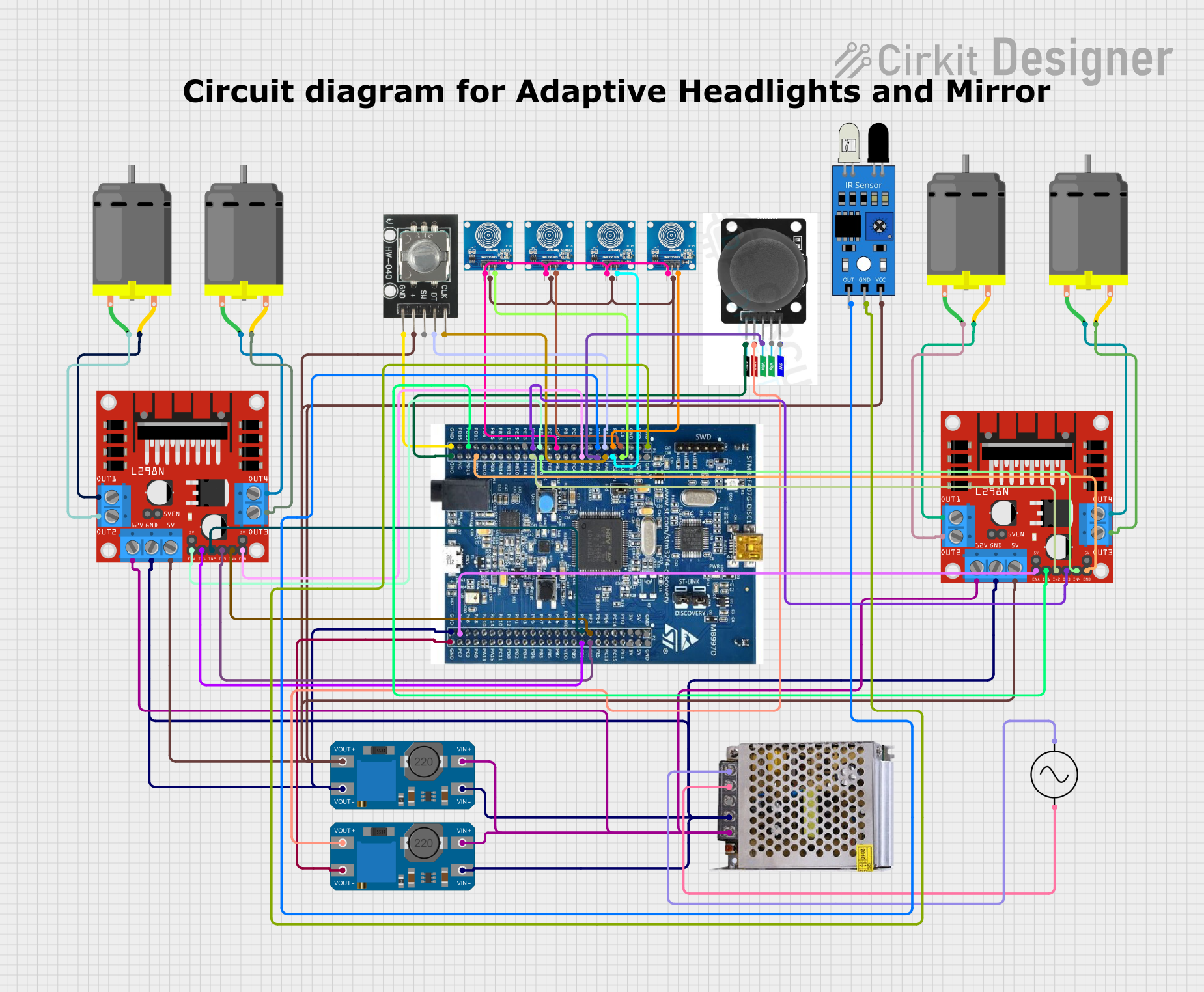
Explore Projects Built with STorM32 micro motor v252E
Common Applications and Use Cases
- Multirotor drones for stable and efficient flight
- Camera gimbals for smooth and precise stabilization
- Robotics systems requiring compact and lightweight motors
- Custom motion control projects
Technical Specifications
The following table outlines the key technical details of the STorM32 Micro Motor v252E:
| Parameter | Value |
|---|---|
| Manufacturer | Olliw42 |
| Part ID | TOP |
| Motor Type | Brushless DC (BLDC) |
| Voltage Range | 7.4V - 16.8V (2S to 4S LiPo) |
| Maximum Current | 2.5A |
| Rated Power | 42W |
| Motor KV Rating | 2200 KV |
| Weight | 18 grams |
| Dimensions | 22mm x 22mm x 15mm |
| Shaft Diameter | 2mm |
| Mounting Hole Pattern | 16mm x 16mm (M2 screws) |
| Operating Temperature | -10°C to 60°C |
Pin Configuration and Descriptions
The motor has three primary wires for connection to an electronic speed controller (ESC). The pinout is as follows:
| Wire Color | Function |
|---|---|
| Red | Phase A (Motor winding) |
| Yellow | Phase B (Motor winding) |
| Black | Phase C (Motor winding) |
Note: The motor does not have a built-in sensor and is designed for sensorless operation.
Usage Instructions
How to Use the Component in a Circuit
- Connect to an ESC: The STorM32 Micro Motor v252E must be connected to a compatible electronic speed controller (ESC). Match the three motor wires (Red, Yellow, Black) to the ESC's output wires. The order of connection determines the motor's rotation direction.
- Power Supply: Ensure the ESC is powered by a suitable LiPo battery (2S to 4S, 7.4V to 16.8V). Verify that the battery's voltage and current ratings meet the motor's requirements.
- Control Signal: Use a flight controller, Arduino, or other microcontroller to send PWM signals to the ESC for motor speed and direction control.
Important Considerations and Best Practices
- ESC Compatibility: Use an ESC that supports sensorless brushless motors and is rated for at least 2.5A continuous current.
- Cooling: Ensure adequate airflow around the motor to prevent overheating during prolonged use.
- Mounting: Use the 16mm x 16mm mounting hole pattern with M2 screws to securely attach the motor to your frame or gimbal.
- Direction Reversal: If the motor spins in the wrong direction, swap any two of the three motor wires connected to the ESC.
Example: Using with Arduino UNO
Below is an example of controlling the motor using an Arduino UNO and a compatible ESC:
// Example code to control the STorM32 Micro Motor v252E using Arduino UNO
// Ensure the ESC is properly connected to the motor and powered by a LiPo battery
#include <Servo.h> // Library to generate PWM signals
Servo esc; // Create a Servo object to control the ESC
void setup() {
esc.attach(9); // Connect ESC signal wire to Arduino pin 9
esc.writeMicroseconds(1000); // Send minimum throttle signal to arm the ESC
delay(2000); // Wait for the ESC to initialize
}
void loop() {
esc.writeMicroseconds(1500); // Set motor to mid-speed (adjust value as needed)
delay(5000); // Run motor for 5 seconds
esc.writeMicroseconds(1000); // Stop the motor
delay(2000); // Wait for 2 seconds before restarting
}
Note: Always follow the ESC's arming procedure as specified in its documentation.
Troubleshooting and FAQs
Common Issues and Solutions
Motor Does Not Spin
- Cause: Incorrect wiring between the motor and ESC.
- Solution: Verify the connections and ensure the ESC is properly powered.
Motor Spins in the Wrong Direction
- Cause: Incorrect phase wire connections.
- Solution: Swap any two of the three motor wires connected to the ESC.
Motor Overheats
- Cause: Prolonged operation at high current or insufficient cooling.
- Solution: Reduce the load on the motor and ensure proper airflow.
ESC Does Not Arm
- Cause: Incorrect PWM signal or power supply issue.
- Solution: Check the Arduino code and ensure the ESC is receiving the correct signal.
FAQs
Q: Can this motor be used with a 5V power supply?
A: No, the motor requires a voltage range of 7.4V to 16.8V (2S to 4S LiPo).Q: Is this motor compatible with all ESCs?
A: The motor is compatible with sensorless brushless ESCs rated for at least 2.5A.Q: How do I reverse the motor's direction?
A: Swap any two of the three motor wires connected to the ESC.Q: Can I use this motor for a gimbal application?
A: Yes, the motor's lightweight and compact design make it suitable for gimbals.
By following this documentation, you can effectively integrate the STorM32 Micro Motor v252E into your projects and achieve optimal performance.