How to Use TMC2209: Examples, Pinouts, and Specs
Introduction
The TMC2209 is a stepper motor driver IC manufactured by Fysetec (Part ID: V4.0). It is designed for high-performance applications requiring precise and silent motor control. The TMC2209 features advanced technologies such as StealthChop2 for silent operation, SpreadCycle for high torque, and StallGuard4 for sensorless homing. These features make it an excellent choice for 3D printers, CNC machines, and other motion control systems.
Explore Projects Built with TMC2209

Explore Projects Built with TMC2209
Common Applications
- 3D printers for precise and quiet motor control
- CNC machines for high torque and efficiency
- Robotics and automation systems
- Camera sliders and other motion control devices
Technical Specifications
Key Technical Details
| Parameter | Value |
|---|---|
| Operating Voltage (VCC) | 4.75V to 29V |
| Logic Voltage (VIO) | 3.3V or 5V |
| Maximum Motor Current | Up to 2.0A RMS (2.8A peak) |
| Microstepping | Up to 1/256 microstepping |
| Communication Interface | UART |
| Features | StealthChop2, SpreadCycle, |
| StallGuard4, CoolStep | |
| Operating Temperature | -40°C to +125°C |
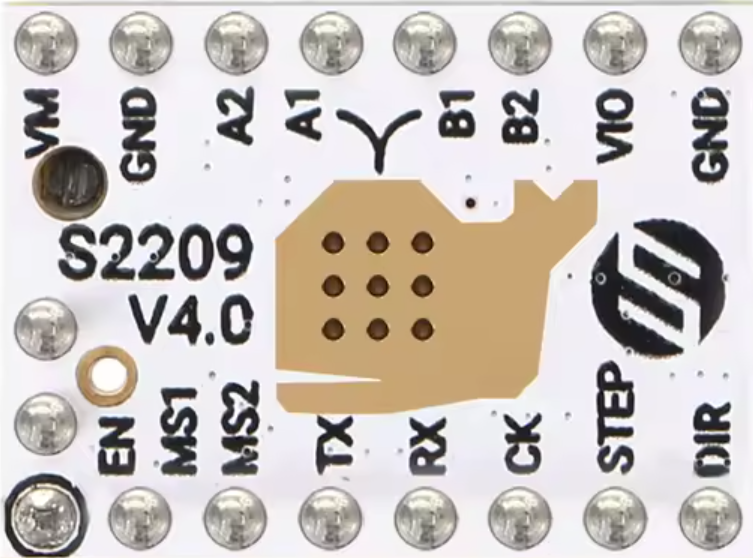
Pin Configuration and Descriptions
The TMC2209 is typically available in a 28-pin package. Below is the pin configuration and description:
| Pin Number | Pin Name | Description |
|---|---|---|
| 1 | VCC_IO | Logic voltage input (3.3V or 5V) |
| 2 | GND | Ground |
| 3 | VM | Motor power supply (4.75V to 29V) |
| 4 | ENN | Enable input (active low) |
| 5 | DIR | Direction control input |
| 6 | STEP | Step pulse input |
| 7 | UART_TX | UART transmit pin |
| 8 | UART_RX | UART receive pin |
| 9 | MS1 | Microstepping resolution select (MS1) |
| 10 | MS2 | Microstepping resolution select (MS2) |
| 11 | DIAG | Diagnostic output |
| 12 | INDEX | Microstep position indicator |
| 13 | VREF | Reference voltage for current setting |
| 14 | NC | Not connected |
Note: The remaining pins are typically used for internal functions or are not connected. Refer to the manufacturer's datasheet for a complete pinout.
Usage Instructions
How to Use the TMC2209 in a Circuit
- Power Supply: Connect the motor power supply (VM) to a voltage source between 4.75V and 29V. Ensure the logic voltage (VCC_IO) matches your microcontroller's logic level (3.3V or 5V).
- Microstepping Configuration: Use the MS1 and MS2 pins to set the desired microstepping resolution. For example:
- MS1 = LOW, MS2 = LOW: Full step
- MS1 = HIGH, MS2 = LOW: Half step
- MS1 = HIGH, MS2 = HIGH: 1/16 step
- Control Signals: Connect the STEP and DIR pins to your microcontroller for step and direction control.
- UART Communication: For advanced features like StallGuard4 and CoolStep, connect the UART_TX and UART_RX pins to your microcontroller's UART interface.
- Current Setting: Adjust the VREF pin to set the motor current. Use the formula provided in the datasheet to calculate the appropriate VREF voltage.
Important Considerations
- Cooling: The TMC2209 can generate heat during operation. Use a heatsink or active cooling if necessary.
- Decoupling Capacitors: Place decoupling capacitors close to the VM and VCC_IO pins to ensure stable operation.
- Motor Compatibility: Ensure the stepper motor's current rating matches the TMC2209's capabilities.
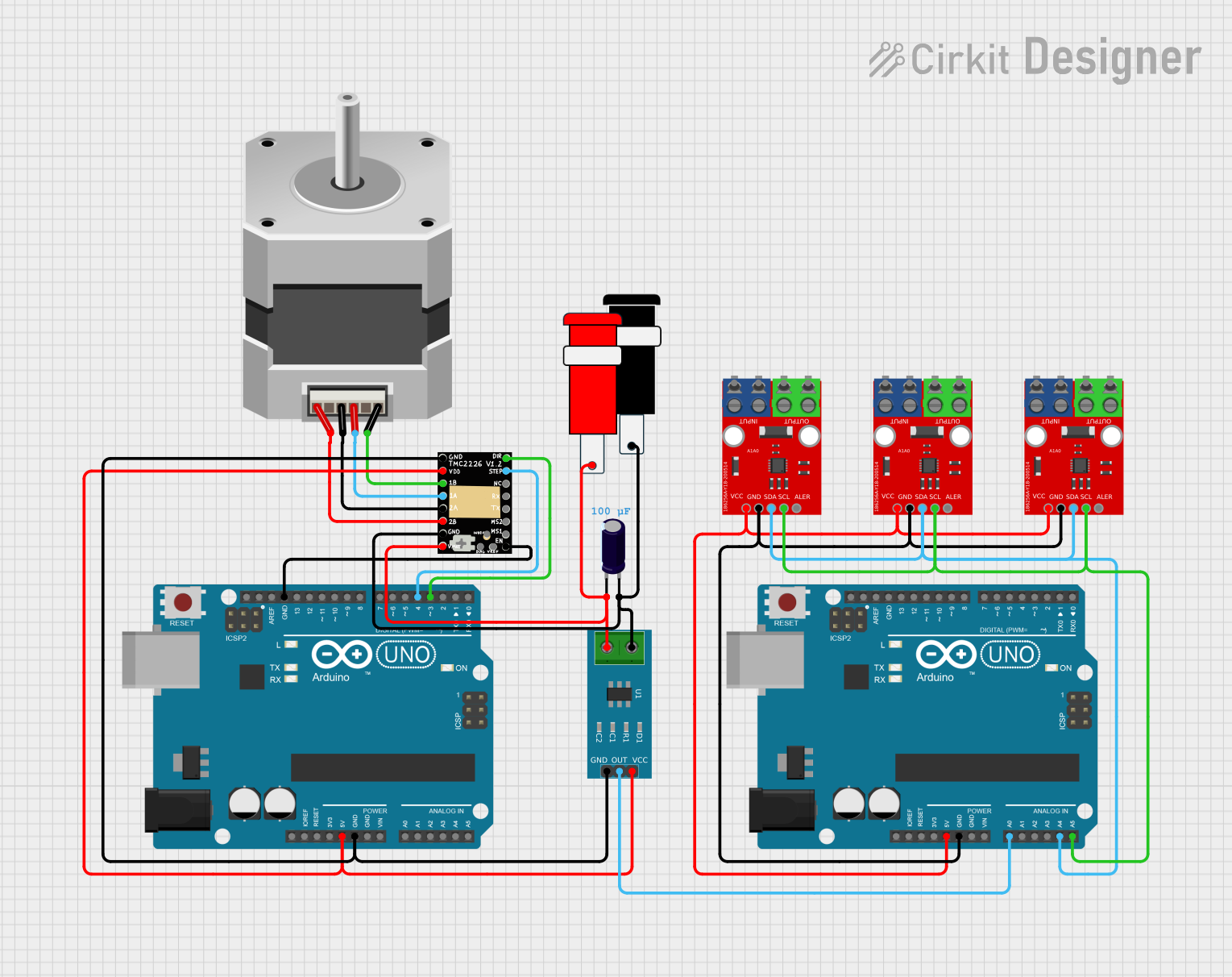
Example: Using TMC2209 with Arduino UNO
Below is an example of how to control the TMC2209 using an Arduino UNO:
// Example code to control TMC2209 with Arduino UNO
// This code assumes the TMC2209 is connected in STEP/DIR mode
#define STEP_PIN 3 // Pin connected to STEP
#define DIR_PIN 4 // Pin connected to DIR
#define ENABLE_PIN 5 // Pin connected to ENN (active low)
void setup() {
pinMode(STEP_PIN, OUTPUT); // Set STEP pin as output
pinMode(DIR_PIN, OUTPUT); // Set DIR pin as output
pinMode(ENABLE_PIN, OUTPUT); // Set ENABLE pin as output
digitalWrite(ENABLE_PIN, LOW); // Enable the driver (ENN is active low)
digitalWrite(DIR_PIN, HIGH); // Set direction (HIGH or LOW)
}
void loop() {
// Generate step pulses
digitalWrite(STEP_PIN, HIGH); // Set STEP pin HIGH
delayMicroseconds(500); // Wait 500 microseconds
digitalWrite(STEP_PIN, LOW); // Set STEP pin LOW
delayMicroseconds(500); // Wait 500 microseconds
}
Note: Adjust the
delayMicrosecondsvalue to control the motor speed.
Troubleshooting and FAQs
Common Issues and Solutions
Motor Not Moving
- Cause: Incorrect wiring or insufficient power supply.
- Solution: Double-check all connections and ensure the power supply meets the voltage and current requirements.
Overheating
- Cause: Excessive motor current or inadequate cooling.
- Solution: Reduce the motor current by adjusting the VREF pin and add a heatsink or fan.
No UART Communication
- Cause: Incorrect UART wiring or baud rate mismatch.
- Solution: Verify the UART connections and ensure the baud rate matches the microcontroller's settings.
Stepper Motor Vibrates but Does Not Rotate
- Cause: Incorrect microstepping configuration or insufficient current.
- Solution: Check the MS1 and MS2 pin settings and adjust the motor current.
FAQs
Q: Can the TMC2209 operate without UART?
- A: Yes, the TMC2209 can operate in standalone mode using STEP/DIR control without UART.
Q: What is the maximum microstepping resolution?
- A: The TMC2209 supports up to 1/256 microstepping.
Q: How do I enable sensorless homing?
- A: Sensorless homing requires UART communication to configure the StallGuard4 feature. Refer to the datasheet for detailed instructions.
Q: Can I use the TMC2209 with a 12V power supply?
- A: Yes, the TMC2209 supports motor power supply voltages between 4.75V and 29V, including 12V.
By following this documentation, you can effectively integrate the TMC2209 into your projects for precise and silent stepper motor control.