How to Use MKE-S16 I2C Line Follower Sensor: Examples, Pinouts, and Specs
Introduction
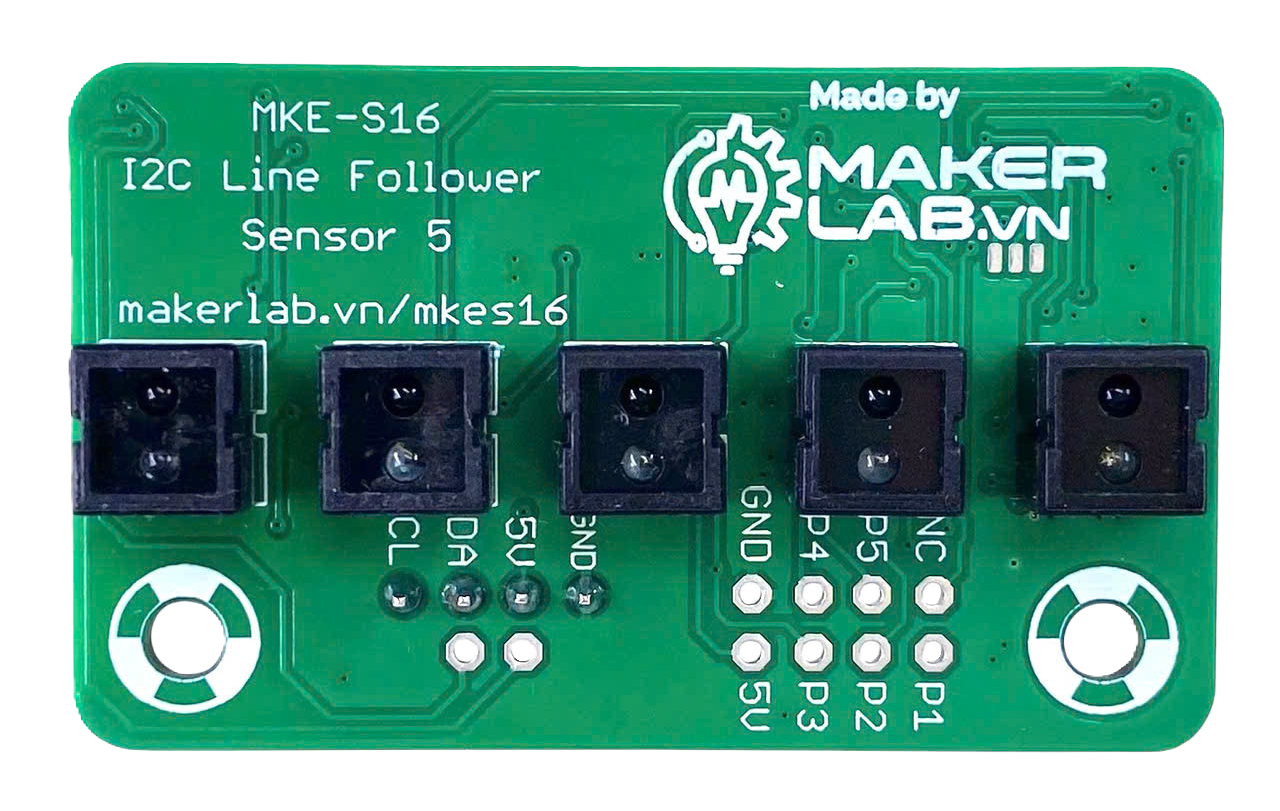
The MKE-S16 I2C Line Follower Sensor, manufactured by Makerlabvn, is a versatile and efficient sensor designed for robotics applications. It is primarily used to detect and follow lines on a surface, making it an essential component for line-following robots. The sensor employs an array of infrared (IR) sensors to detect the contrast between a line (typically black) and the surrounding surface (typically white or light-colored).
The MKE-S16 communicates via the I2C protocol, allowing seamless integration with microcontrollers such as Arduino, Raspberry Pi, and other development boards. Its compact design and reliable performance make it ideal for educational projects, hobbyist robotics, and industrial automation systems.
Explore Projects Built with MKE-S16 I2C Line Follower Sensor

Explore Projects Built with MKE-S16 I2C Line Follower Sensor
Common Applications
- Line-following robots for educational and competitive robotics
- Automated guided vehicles (AGVs) in warehouses or factories
- Path-tracking systems in smart toys and robotic kits
- Obstacle avoidance and navigation systems (when combined with other sensors)
Technical Specifications
Key Technical Details
| Parameter | Value |
|---|---|
| Operating Voltage | 3.3V to 5V |
| Communication Protocol | I2C |
| I2C Address (Default) | 0x40 |
| Number of IR Sensors | 16 |
| Detection Range | 2mm to 10mm above the surface |
| Current Consumption | ~30mA |
| Dimensions | 100mm x 15mm x 5mm |
| Weight | 10g |
| Operating Temperature | -10°C to 50°C |
Pin Configuration and Descriptions
| Pin Name | Type | Description |
|---|---|---|
| VCC | Power | Power supply input (3.3V to 5V) |
| GND | Ground | Ground connection |
| SDA | Data Line | I2C data line for communication |
| SCL | Clock Line | I2C clock line for communication |
Usage Instructions
How to Use the MKE-S16 in a Circuit
- Power the Sensor: Connect the
VCCpin to a 3.3V or 5V power source and theGNDpin to the ground of your microcontroller. - I2C Connection: Connect the
SDAandSCLpins of the sensor to the corresponding I2C pins on your microcontroller. For an Arduino UNO, connect:SDAto A4SCLto A5
- Mounting: Position the sensor 2mm to 10mm above the surface to ensure accurate line detection.
- Programming: Use the I2C protocol to read data from the sensor. The sensor outputs a 16-bit value representing the line position.
Important Considerations and Best Practices
- Ensure the surface has a high contrast between the line and the background for optimal performance.
- Avoid direct sunlight or strong ambient IR light, as it may interfere with the sensor's readings.
- Use pull-up resistors (typically 4.7kΩ) on the
SDAandSCLlines if your microcontroller does not have internal pull-ups enabled. - Regularly clean the sensor to remove dust or debris that may affect detection accuracy.
Example Code for Arduino UNO
Below is an example Arduino sketch to interface with the MKE-S16 sensor and read line position data:
#include <Wire.h> // Include the Wire library for I2C communication
#define SENSOR_ADDRESS 0x40 // Default I2C address of the MKE-S16 sensor
void setup() {
Wire.begin(); // Initialize I2C communication
Serial.begin(9600); // Start serial communication for debugging
Serial.println("MKE-S16 Line Follower Sensor Initialized");
}
void loop() {
Wire.beginTransmission(SENSOR_ADDRESS); // Start communication with the sensor
Wire.write(0x00); // Request data from the sensor
Wire.endTransmission();
Wire.requestFrom(SENSOR_ADDRESS, 2); // Request 2 bytes of data
if (Wire.available() == 2) { // Check if 2 bytes are available
uint16_t linePosition = Wire.read() << 8 | Wire.read();
// Combine the two bytes into a 16-bit value
Serial.print("Line Position: ");
Serial.println(linePosition); // Print the line position
} else {
Serial.println("Error: No data received from sensor");
}
delay(100); // Wait 100ms before the next reading
}
Troubleshooting and FAQs
Common Issues and Solutions
| Issue | Possible Cause | Solution |
|---|---|---|
| No data received from the sensor | Incorrect I2C address or wiring issue | Verify the I2C address and check all connections |
| Inconsistent or inaccurate line detection | Sensor height is not within the recommended range | Adjust the sensor height to 2mm-10mm above the surface |
| Sensor not responding | Missing pull-up resistors on I2C lines | Add 4.7kΩ pull-up resistors to SDA and SCL |
| Interference from ambient light | Strong IR light in the environment | Use the sensor in a controlled lighting environment |
FAQs
Can the I2C address be changed?
- No, the MKE-S16 has a fixed I2C address of
0x40.
- No, the MKE-S16 has a fixed I2C address of
What is the maximum detection range?
- The sensor can detect lines at a height of up to 10mm above the surface.
Can the sensor detect curved lines?
- Yes, the sensor can detect curved lines as long as the line remains within the sensor's detection range.
Is the sensor compatible with 3.3V microcontrollers?
- Yes, the MKE-S16 operates at both 3.3V and 5V, making it compatible with a wide range of microcontrollers.
This concludes the documentation for the MKE-S16 I2C Line Follower Sensor. For further assistance, refer to the manufacturer's datasheet or contact Makerlabvn support.