How to Use VL53L3CX: Examples, Pinouts, and Specs
Introduction
The VL53L3CX is a state-of-the-art time-of-flight (ToF) distance sensor manufactured by Laser Sensor. It uses advanced laser technology to measure distances with high accuracy and reliability. The sensor can detect objects up to 4 meters away and supports multi-target detection, making it ideal for a wide range of applications.
Explore Projects Built with VL53L3CX
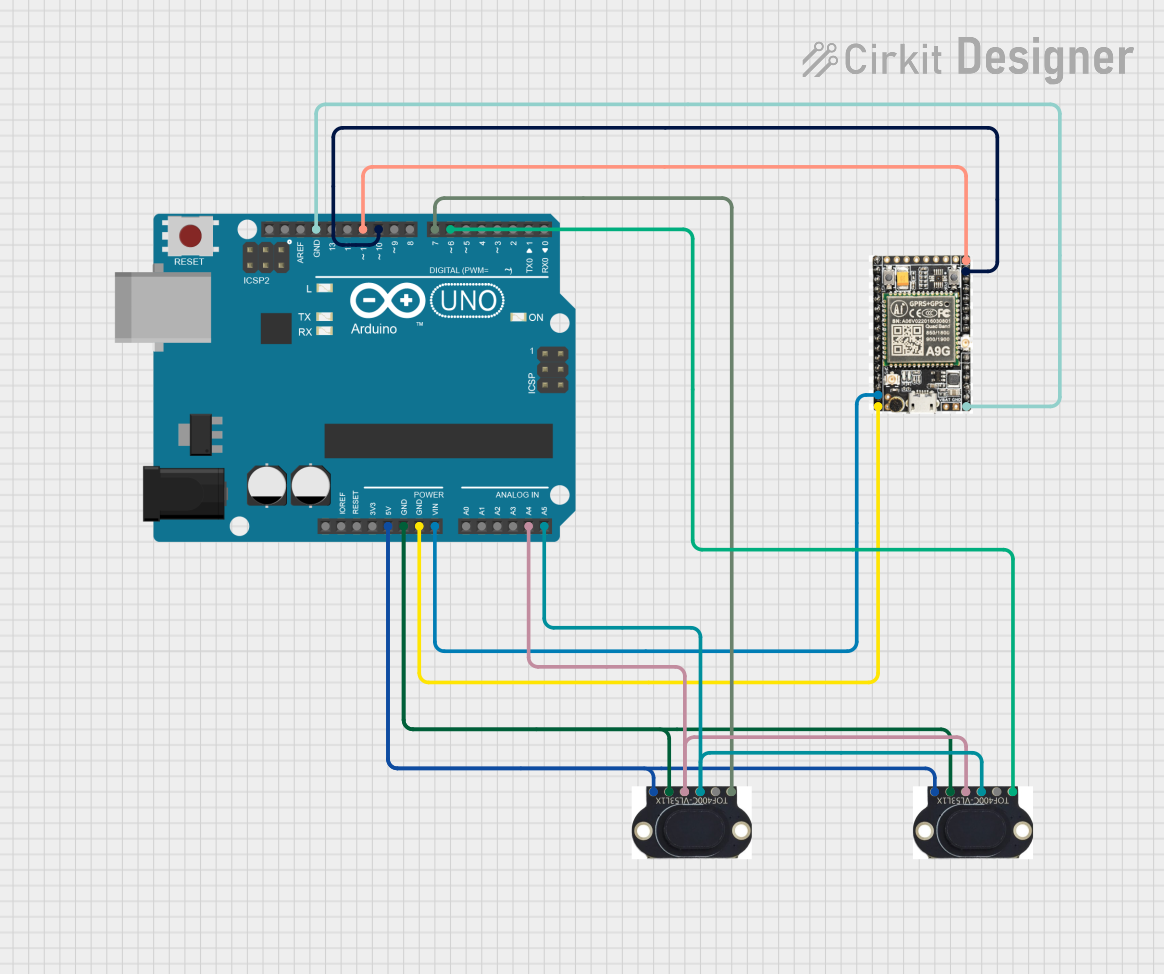
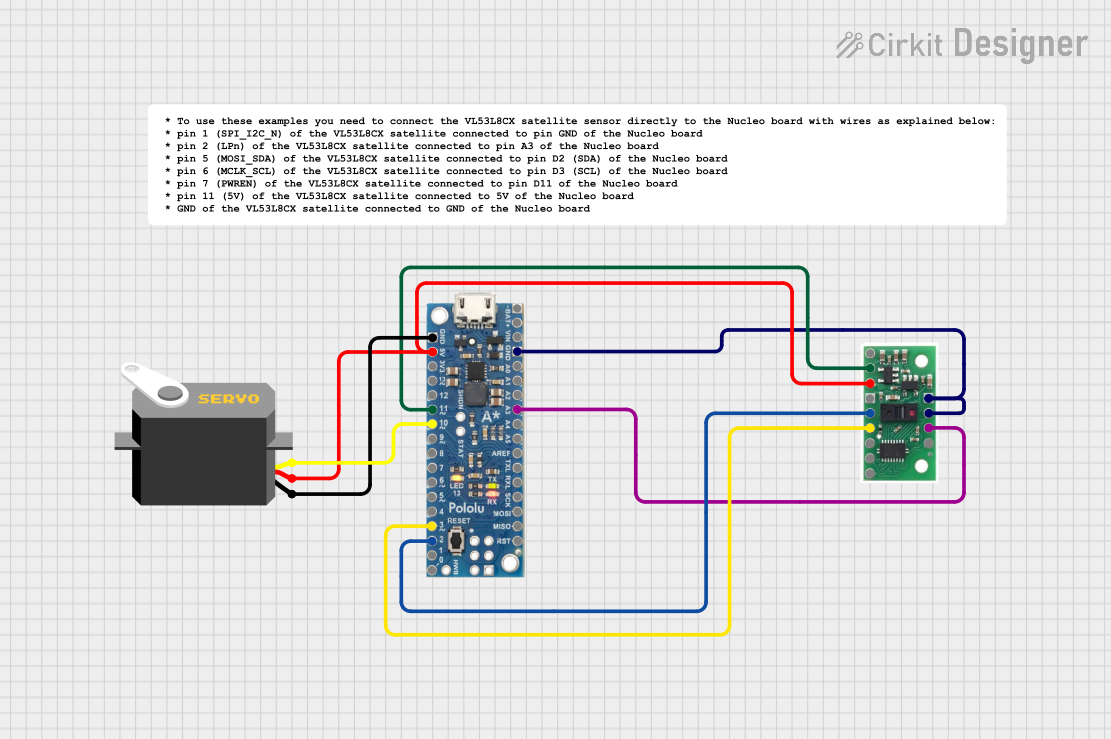
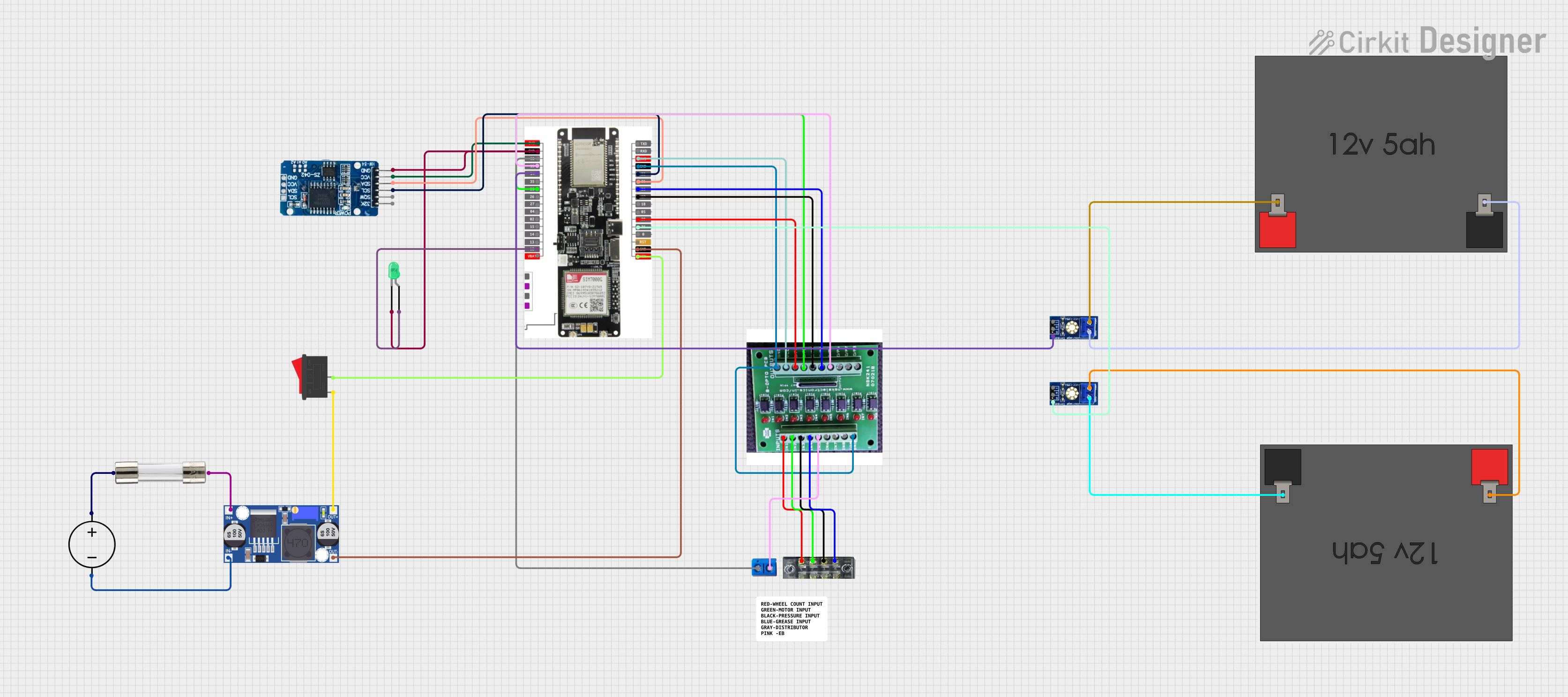
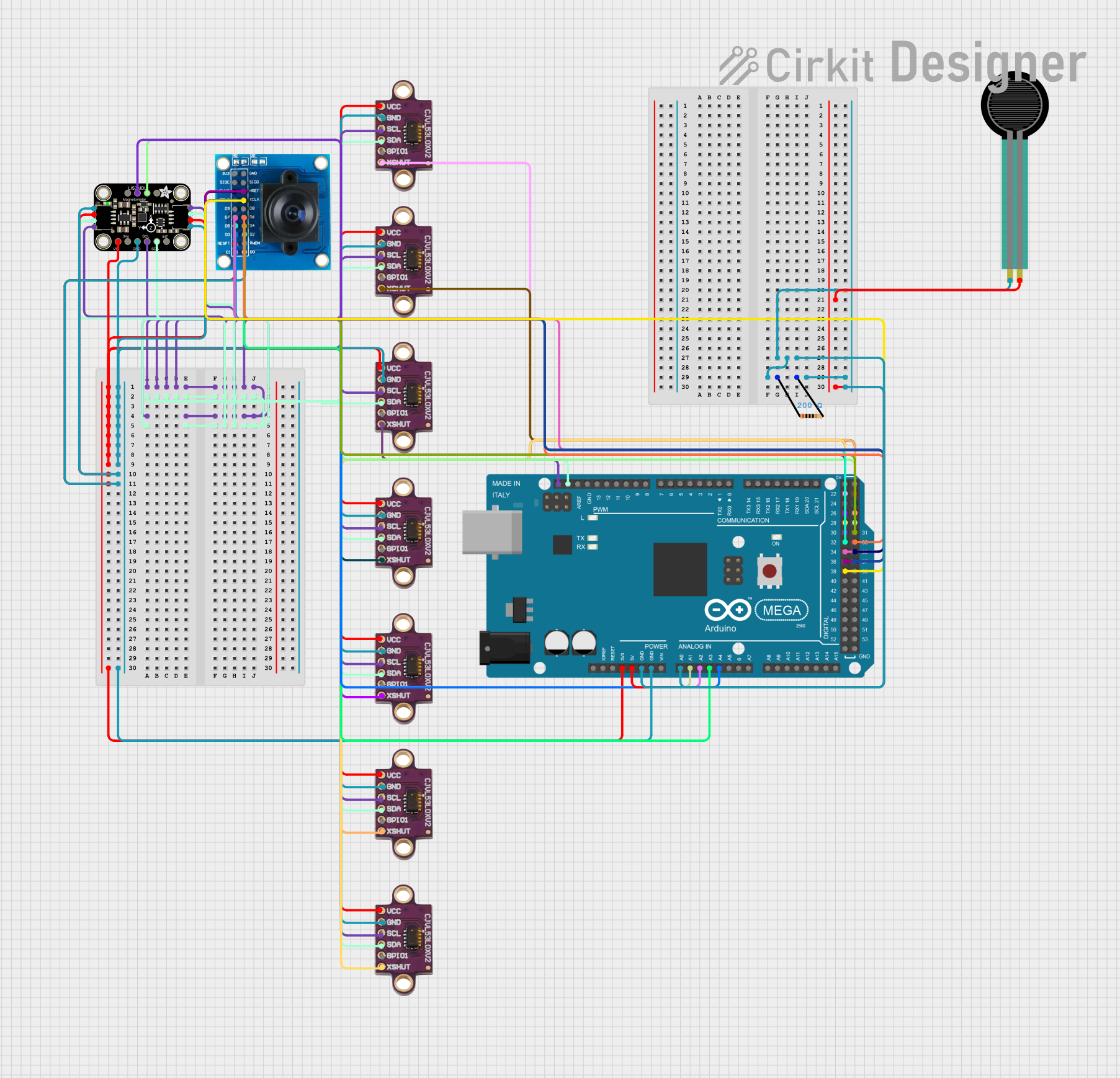
Explore Projects Built with VL53L3CX
Common Applications
- Robotics for obstacle detection and navigation
- Drones for altitude measurement and collision avoidance
- Industrial automation for object detection and positioning
- Smart home devices for presence detection
- Consumer electronics for gesture recognition
Technical Specifications
The VL53L3CX is designed to deliver precise distance measurements in a compact form factor. Below are its key technical details:
Key Specifications
| Parameter | Value |
|---|---|
| Operating Voltage | 2.6V to 3.5V |
| Communication Interface | I²C (up to 1 MHz) |
| Measurement Range | 0.1m to 4m |
| Accuracy | ±5mm (typical) |
| Field of View (FoV) | 27° |
| Multi-Target Detection | Yes |
| Operating Temperature | -20°C to +85°C |
| Power Consumption | 20mW (typical) |
| Dimensions | 4.4mm x 2.4mm x 1.0mm |
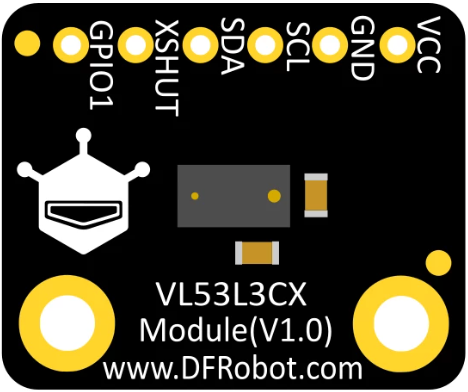
Pin Configuration
The VL53L3CX has a simple pinout for easy integration into circuits. Below is the pin configuration:
| Pin Name | Pin Number | Description |
|---|---|---|
| GND | 1 | Ground |
| VIN | 2 | Power supply (2.6V to 3.5V) |
| SDA | 3 | I²C data line |
| SCL | 4 | I²C clock line |
| GPIO1 | 5 | Interrupt or shutdown control |
| XSHUT | 6 | Shutdown pin (active low) |
Usage Instructions
The VL53L3CX is straightforward to use in a circuit, especially with microcontrollers like the Arduino UNO. Below are the steps to get started:
Connecting the VL53L3CX to an Arduino UNO
- Power the Sensor: Connect the VIN pin to the Arduino's 3.3V pin and the GND pin to the Arduino's GND.
- I²C Communication: Connect the SDA pin to the Arduino's A4 pin and the SCL pin to the Arduino's A5 pin.
- Optional Pins: The XSHUT pin can be connected to a digital pin on the Arduino for enabling/disabling the sensor. The GPIO1 pin can be used for interrupt handling.
Sample Arduino Code
Below is an example of how to use the VL53L3CX with an Arduino UNO. This code reads the distance measured by the sensor and prints it to the Serial Monitor.
#include <Wire.h>
#include <VL53L3CX.h> // Include the VL53L3CX library
VL53L3CX sensor; // Create a sensor object
void setup() {
Serial.begin(9600); // Initialize serial communication
Wire.begin(); // Initialize I²C communication
// Initialize the VL53L3CX sensor
if (!sensor.begin()) {
Serial.println("Failed to initialize VL53L3CX!");
while (1); // Halt if initialization fails
}
Serial.println("VL53L3CX initialized successfully.");
}
void loop() {
// Read the distance in millimeters
int distance = sensor.readRange();
// Check for errors
if (sensor.timeoutOccurred()) {
Serial.println("Sensor timeout!");
} else {
// Print the distance to the Serial Monitor
Serial.print("Distance: ");
Serial.print(distance);
Serial.println(" mm");
}
delay(100); // Wait 100ms before the next reading
}
Important Considerations
- Power Supply: Ensure the sensor is powered within its operating voltage range (2.6V to 3.5V). Using 5V directly may damage the sensor.
- I²C Pull-Up Resistors: If your circuit does not already include pull-up resistors on the I²C lines, add 4.7kΩ resistors between SDA and 3.3V, and SCL and 3.3V.
- Ambient Light: Excessive ambient light may affect the sensor's accuracy. Use the sensor in controlled lighting conditions for best results.
- FoV Considerations: The sensor has a 27° field of view. Ensure no unwanted objects are within this range to avoid interference.
Troubleshooting and FAQs
Common Issues
Sensor Not Detected
- Cause: Incorrect I²C wiring or address mismatch.
- Solution: Verify the connections and ensure the I²C address matches the library's default (0x52).
Inaccurate Distance Measurements
- Cause: Reflective or transparent surfaces in the sensor's path.
- Solution: Avoid using the sensor with highly reflective or transparent objects.
Sensor Timeout
- Cause: Communication issues or excessive distance.
- Solution: Check the wiring and ensure the object is within the 4m range.
Interference from Ambient Light
- Cause: Strong ambient light sources near the sensor.
- Solution: Shield the sensor from direct light or use it in controlled environments.
FAQs
Q1: Can the VL53L3CX detect multiple objects simultaneously?
Yes, the sensor supports multi-target detection, allowing it to measure distances to multiple objects within its field of view.
Q2: What is the maximum range of the VL53L3CX?
The sensor can measure distances up to 4 meters under optimal conditions.
Q3: Can I use the VL53L3CX with a 5V microcontroller?
Yes, but you must use a level shifter to step down the I²C signals to 3.3V to avoid damaging the sensor.
Q4: How do I reduce noise in the measurements?
Use averaging techniques in your code or operate the sensor in a stable environment to minimize noise.
By following this documentation, you can effectively integrate the VL53L3CX into your projects and achieve accurate distance measurements.