How to Use WPI409 dubbele H-brug driver L298N voor DC- of stappenmotor: Examples, Pinouts, and Specs
Introduction
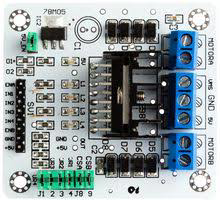
The WPI409 Dual H-Bridge Driver Module, manufactured by Whadda, is a versatile and robust motor driver based on the L298N chip. This module is designed to control DC motors or stepper motors, providing bidirectional control with a high current capacity. It is widely used in robotics, automation, and various DIY electronics projects.
Explore Projects Built with WPI409 dubbele H-brug driver L298N voor DC- of stappenmotor
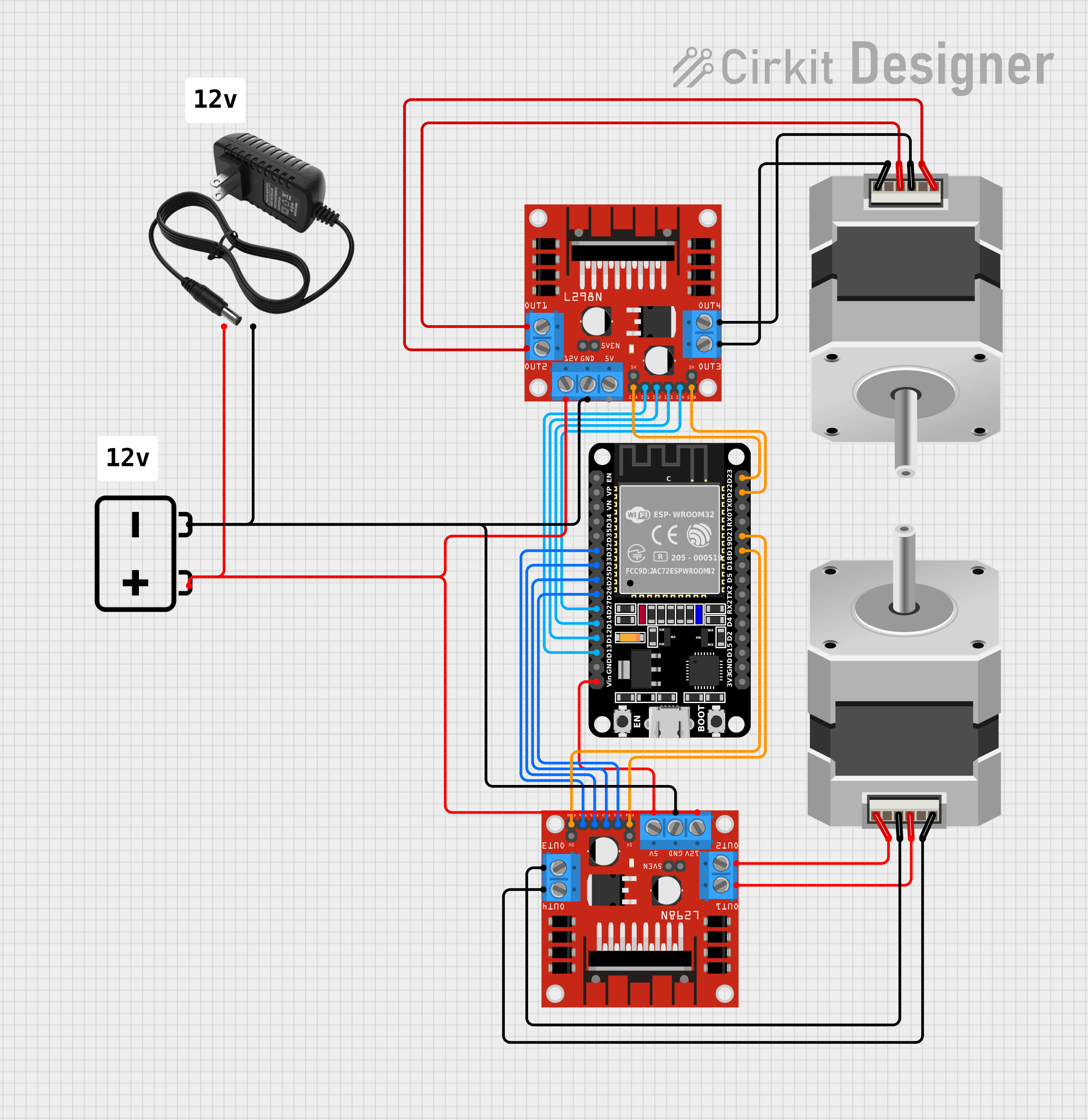
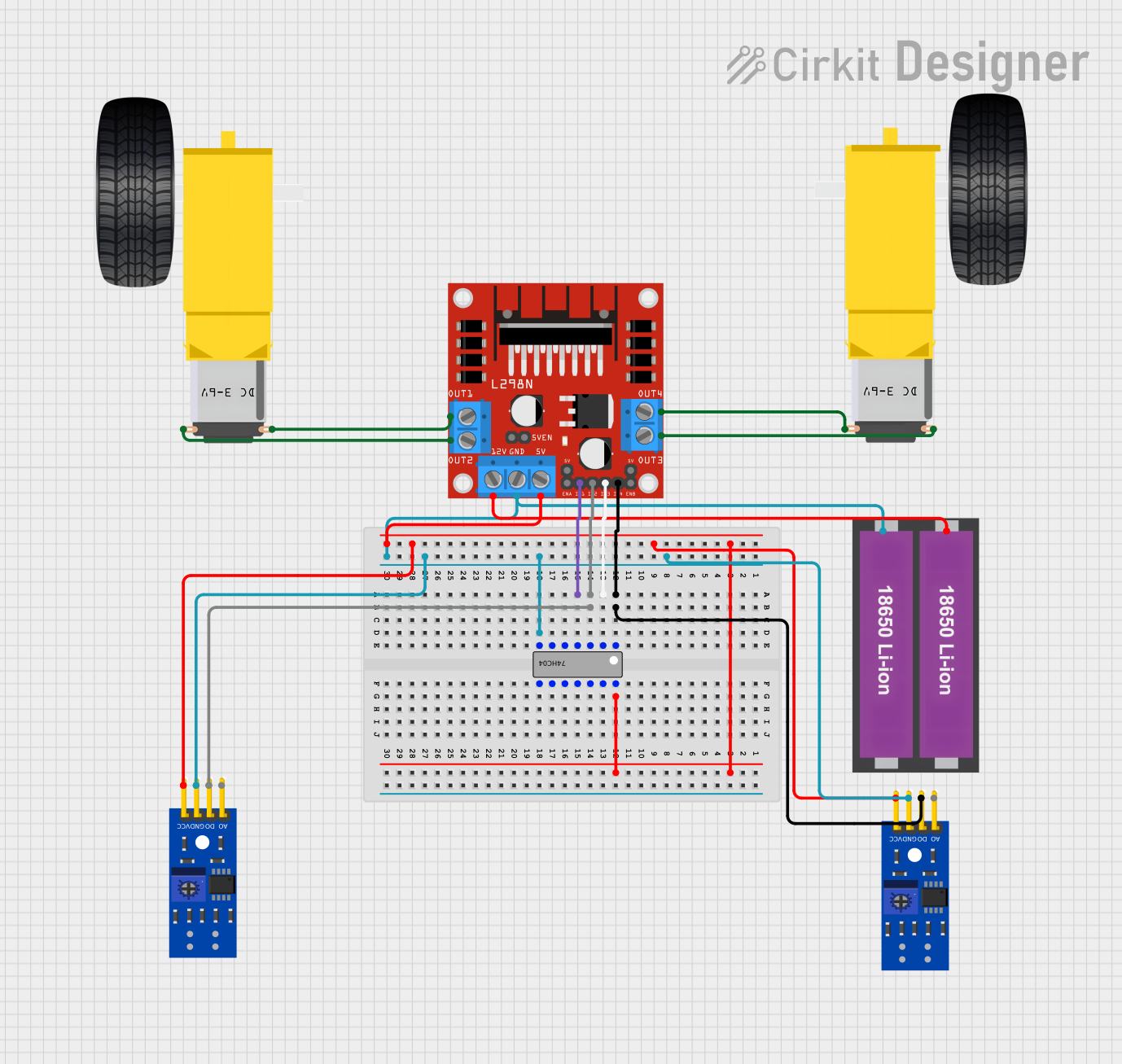
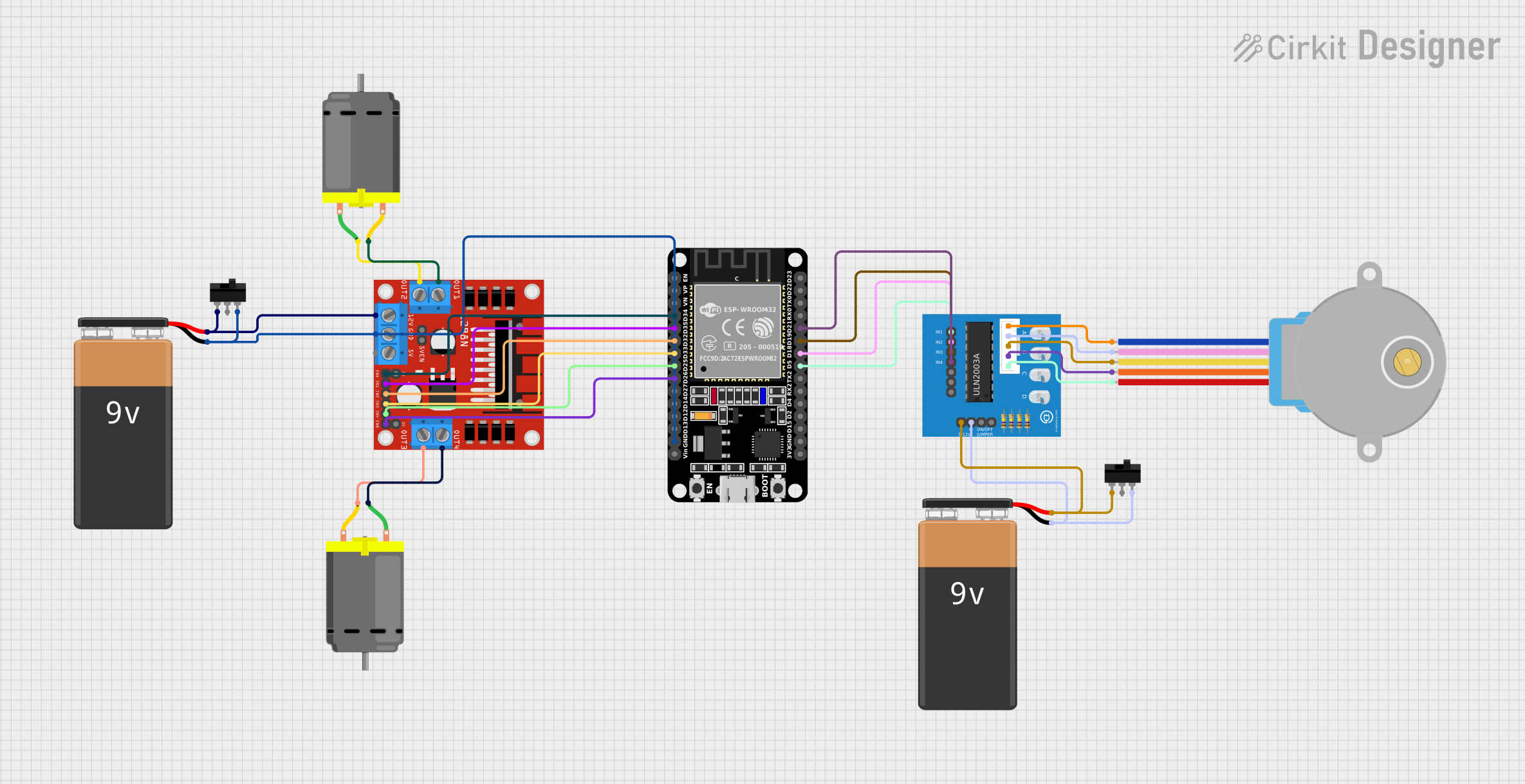
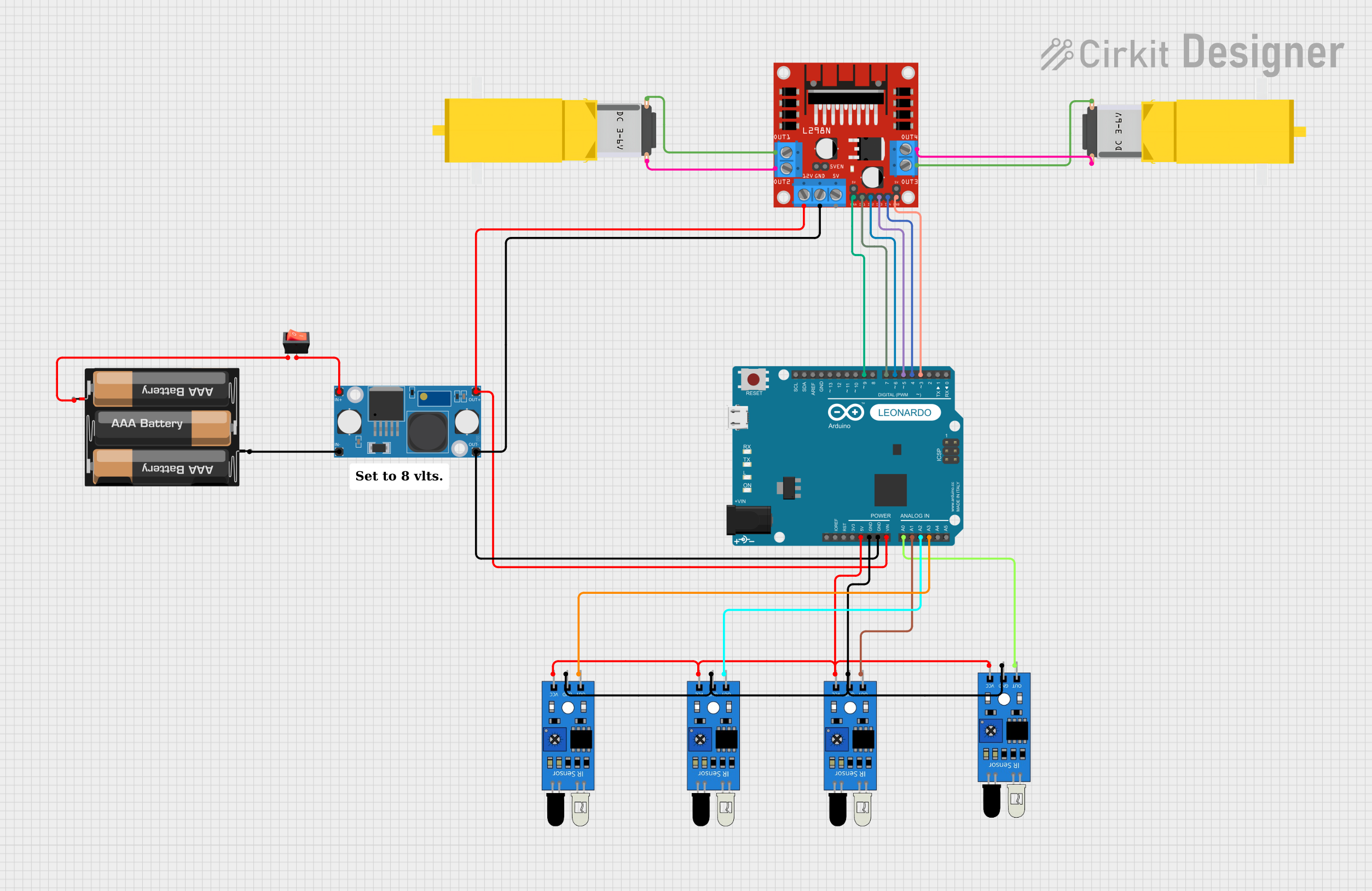
Explore Projects Built with WPI409 dubbele H-brug driver L298N voor DC- of stappenmotor
Common Applications and Use Cases
- Robotics: Controlling the movement of robot wheels or arms.
- Automation Systems: Driving conveyor belts or automated gates.
- DIY Projects: Building remote-controlled cars, drones, or other motorized devices.
- Educational Purposes: Teaching motor control and electronics concepts.
Technical Specifications
Key Technical Details
| Parameter | Value |
|---|---|
| Operating Voltage | 5V to 35V |
| Output Current | 2A per channel (continuous), 3A peak |
| Logic Voltage | 5V |
| Control Logic | TTL compatible |
| Power Dissipation | 25W (at 75°C) |
| Dimensions | 43mm x 43mm x 27mm |
| Weight | 26g |
Pin Configuration and Descriptions
Power and Motor Connections
| Pin Name | Description |
|---|---|
| VCC | Motor power supply (5V to 35V) |
| GND | Ground |
| 5V | Logic power supply (5V) |
| OUT1 | Motor A output 1 |
| OUT2 | Motor A output 2 |
| OUT3 | Motor B output 1 |
| OUT4 | Motor B output 2 |
Control Pins
| Pin Name | Description |
|---|---|
| ENA | Enable pin for Motor A (High to enable) |
| IN1 | Control input 1 for Motor A |
| IN2 | Control input 2 for Motor A |
| ENB | Enable pin for Motor B (High to enable) |
| IN3 | Control input 1 for Motor B |
| IN4 | Control input 2 for Motor B |
Usage Instructions
How to Use the Component in a Circuit
Power Connections:
- Connect the VCC pin to the motor power supply (5V to 35V).
- Connect the GND pin to the ground of the power supply.
- Connect the 5V pin to the 5V logic power supply.
Motor Connections:
- Connect the motor terminals to OUT1 and OUT2 for Motor A.
- Connect the motor terminals to OUT3 and OUT4 for Motor B.
Control Connections:
- Connect the ENA pin to a digital output pin on your microcontroller to enable Motor A.
- Connect the IN1 and IN2 pins to digital output pins on your microcontroller to control the direction of Motor A.
- Connect the ENB pin to a digital output pin on your microcontroller to enable Motor B.
- Connect the IN3 and IN4 pins to digital output pins on your microcontroller to control the direction of Motor B.
Important Considerations and Best Practices
- Heat Dissipation: The L298N chip can get hot during operation. Ensure proper heat dissipation by using a heat sink or cooling fan if necessary.
- Power Supply: Use a power supply that can provide sufficient current for your motors. Overloading the module can cause damage.
- Logic Levels: Ensure that the control logic voltage is compatible with your microcontroller (typically 5V).
Example Code for Arduino UNO
// Define motor control pins
const int ENA = 9;
const int IN1 = 8;
const int IN2 = 7;
const int ENB = 3;
const int IN3 = 5;
const int IN4 = 4;
void setup() {
// Set all the motor control pins as outputs
pinMode(ENA, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(ENB, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
// Initialize motors to off
digitalWrite(ENA, LOW);
digitalWrite(ENB, LOW);
}
void loop() {
// Example: Move Motor A forward
digitalWrite(ENA, HIGH); // Enable Motor A
digitalWrite(IN1, HIGH); // Set IN1 high
digitalWrite(IN2, LOW); // Set IN2 low
// Example: Move Motor B backward
digitalWrite(ENB, HIGH); // Enable Motor B
digitalWrite(IN3, LOW); // Set IN3 low
digitalWrite(IN4, HIGH); // Set IN4 high
delay(2000); // Run motors for 2 seconds
// Stop motors
digitalWrite(ENA, LOW);
digitalWrite(ENB, LOW);
delay(2000); // Wait for 2 seconds before repeating
}
Troubleshooting and FAQs
Common Issues Users Might Face
Motor Not Running:
- Solution: Check power connections and ensure the power supply is adequate. Verify that the enable pins (ENA and ENB) are set high.
Motor Running in Wrong Direction:
- Solution: Check the control pin connections (IN1, IN2, IN3, IN4) and ensure they are set correctly for the desired direction.
Overheating:
- Solution: Ensure proper heat dissipation with a heat sink or cooling fan. Reduce the load on the motors if necessary.
No Response from Module:
- Solution: Verify that the logic voltage (5V) is correctly supplied. Check all connections and ensure there are no loose wires.
Solutions and Tips for Troubleshooting
- Double-Check Connections: Ensure all connections are secure and correctly placed according to the pin configuration.
- Use a Multimeter: Measure voltages at various points in the circuit to ensure proper power supply and signal levels.
- Consult Datasheets: Refer to the L298N datasheet for detailed information on the chip's operation and characteristics.
By following this documentation, users can effectively utilize the WPI409 Dual H-Bridge Driver Module for controlling DC or stepper motors in various applications. Whether you are a beginner or an experienced user, this guide provides the necessary information to get started and troubleshoot common issues.