How to Use Gy-33: Examples, Pinouts, and Specs
Introduction
The GY-33 is a compact gyroscope sensor designed for measuring angular velocity and orientation. It is widely used in applications such as robotics, motion tracking, drone stabilization, and gaming devices. The sensor provides precise measurements of rotational motion, making it an essential component in systems requiring accurate orientation data.
The GY-33 is known for its small size, low power consumption, and ease of integration with microcontrollers, making it a popular choice for both hobbyists and professionals.
Explore Projects Built with Gy-33
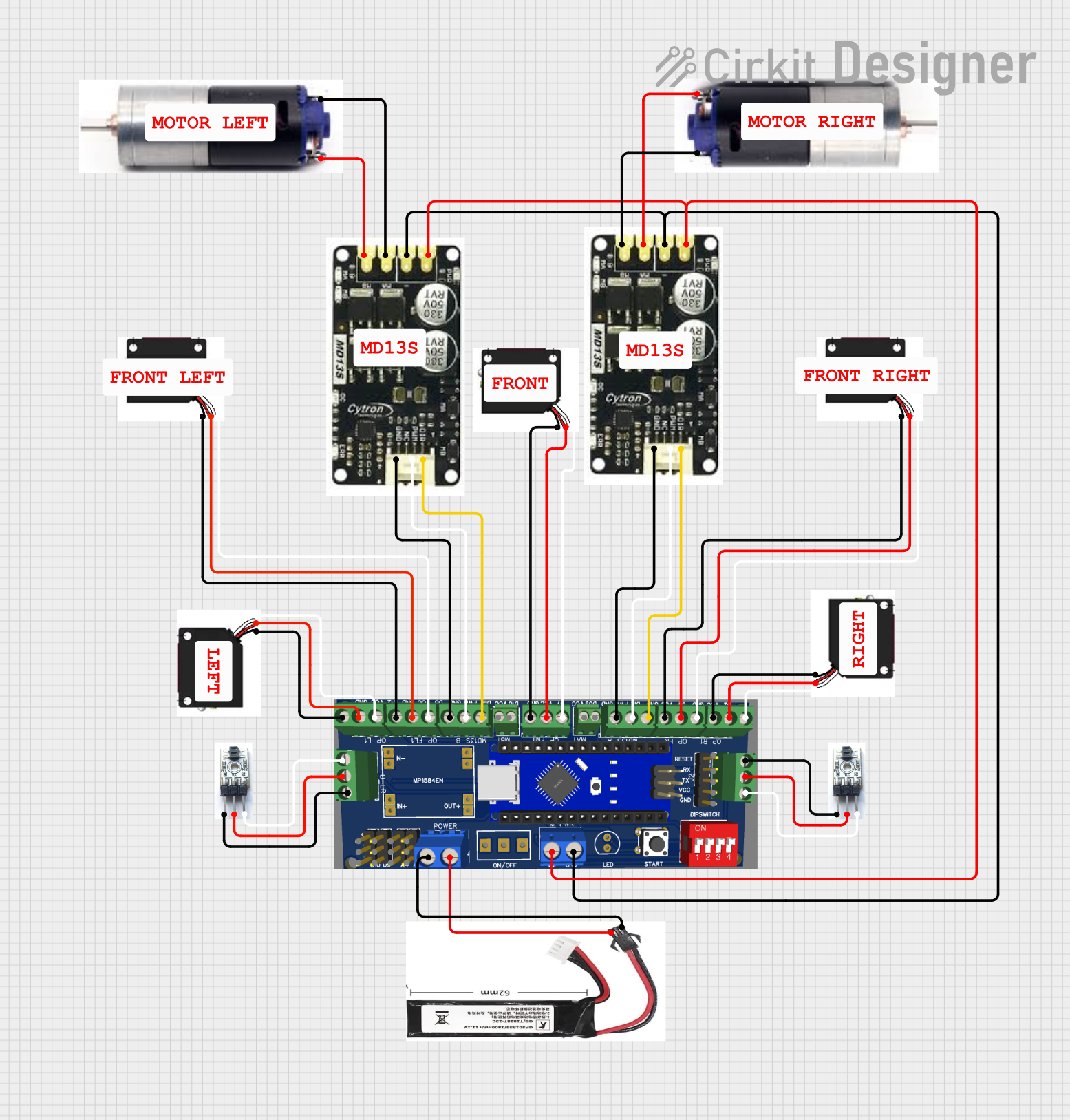
Explore Projects Built with Gy-33
Technical Specifications
Below are the key technical details of the GY-33 gyroscope sensor:
- Operating Voltage: 3.3V to 5V
- Communication Interface: I2C
- Measurement Range: ±250, ±500, ±1000, ±2000 degrees per second (configurable)
- Sensitivity: Configurable based on the measurement range
- Power Consumption: Low power mode available
- Operating Temperature: -40°C to +85°C
- Dimensions: Compact form factor (typically 15mm x 15mm)
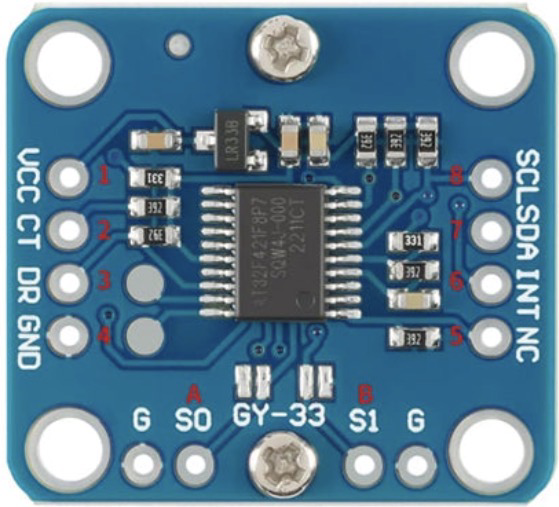
Pin Configuration and Descriptions
The GY-33 module typically has the following pinout:
| Pin Name | Description |
|---|---|
| VCC | Power supply input (3.3V to 5V) |
| GND | Ground |
| SDA | I2C data line |
| SCL | I2C clock line |
| INT | Interrupt pin (optional, for motion detection) |
Usage Instructions
How to Use the GY-33 in a Circuit
- Power the Sensor: Connect the VCC pin to a 3.3V or 5V power source and the GND pin to ground.
- Connect to a Microcontroller: Use the SDA and SCL pins to connect the GY-33 to the I2C pins of your microcontroller. For an Arduino UNO, connect:
- SDA to A4
- SCL to A5
- Optional Interrupt: If you need motion detection, connect the INT pin to a digital input pin on your microcontroller.
- Pull-Up Resistors: Ensure that the I2C lines (SDA and SCL) have pull-up resistors (typically 4.7kΩ) if not already included on the module.
Important Considerations and Best Practices
- I2C Address: The default I2C address of the GY-33 is typically
0x68. Check the datasheet or module documentation for confirmation. - Calibration: Perform sensor calibration to ensure accurate readings, especially in applications requiring high precision.
- Mounting: Secure the sensor firmly to avoid vibrations that could affect measurements.
- Power Supply: Use a stable power source to minimize noise in the sensor readings.
Example Code for Arduino UNO
Below is an example code snippet to read data from the GY-33 using the Arduino Wire library:
#include <Wire.h>
#define GY33_ADDRESS 0x68 // Default I2C address of the GY-33
void setup() {
Wire.begin(); // Initialize I2C communication
Serial.begin(9600); // Start serial communication for debugging
// Wake up the GY-33 (if in sleep mode)
Wire.beginTransmission(GY33_ADDRESS);
Wire.write(0x6B); // Power management register
Wire.write(0x00); // Set to normal mode
Wire.endTransmission();
Serial.println("GY-33 Initialized");
}
void loop() {
Wire.beginTransmission(GY33_ADDRESS);
Wire.write(0x43); // Starting register for gyroscope data
Wire.endTransmission(false);
Wire.requestFrom(GY33_ADDRESS, 6); // Request 6 bytes (X, Y, Z data)
if (Wire.available() == 6) {
int16_t gyroX = (Wire.read() << 8) | Wire.read(); // Combine high and low bytes
int16_t gyroY = (Wire.read() << 8) | Wire.read();
int16_t gyroZ = (Wire.read() << 8) | Wire.read();
// Print gyroscope data
Serial.print("Gyro X: "); Serial.print(gyroX);
Serial.print(" | Gyro Y: "); Serial.print(gyroY);
Serial.print(" | Gyro Z: "); Serial.println(gyroZ);
}
delay(500); // Delay for readability
}
Notes on the Code
- The code initializes the GY-33 and reads raw gyroscope data from the X, Y, and Z axes.
- You may need to scale the raw data based on the configured sensitivity of the sensor.
Troubleshooting and FAQs
Common Issues
No Data from the Sensor
- Ensure the SDA and SCL connections are correct.
- Verify that the I2C address matches the sensor's default or configured address.
- Check for proper pull-up resistors on the I2C lines.
Inaccurate Readings
- Perform sensor calibration to account for offsets and noise.
- Ensure the sensor is mounted securely to avoid vibrations.
I2C Communication Errors
- Check the wiring for loose connections.
- Ensure the microcontroller and sensor share a common ground.
FAQs
Q: Can the GY-33 be used with 5V logic microcontrollers?
A: Yes, the GY-33 is compatible with both 3.3V and 5V logic levels.
Q: How do I change the measurement range of the sensor?
A: The measurement range can be configured by writing to the appropriate register in the sensor's configuration. Refer to the sensor's datasheet for details.
Q: Do I need external pull-up resistors for I2C?
A: Many GY-33 modules include built-in pull-up resistors. If not, you will need to add external resistors (typically 4.7kΩ) to the SDA and SCL lines.
By following this documentation, you should be able to successfully integrate and use the GY-33 gyroscope sensor in your projects.