How to Use BL-M8812EU2: Examples, Pinouts, and Specs
Introduction
The BL-M8812EU2, manufactured by LB-LINK, is a high-performance, low-power DC motor driver specifically designed for controlling brushless motors. It is ideal for applications requiring precise motor control and high efficiency, such as robotics, industrial automation, and electric vehicles. The component integrates advanced control algorithms, making it suitable for both professional and hobbyist projects.
Explore Projects Built with BL-M8812EU2
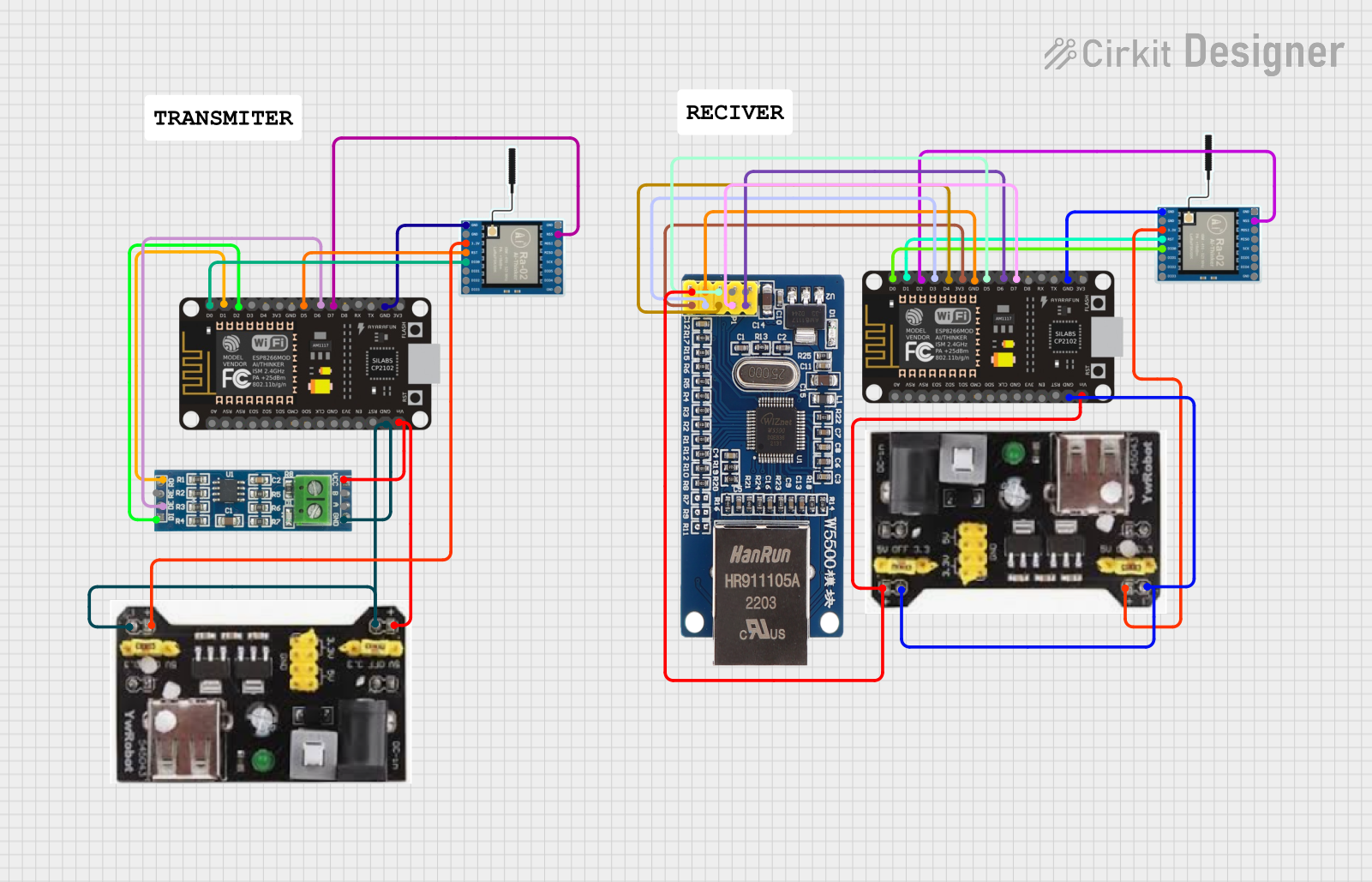

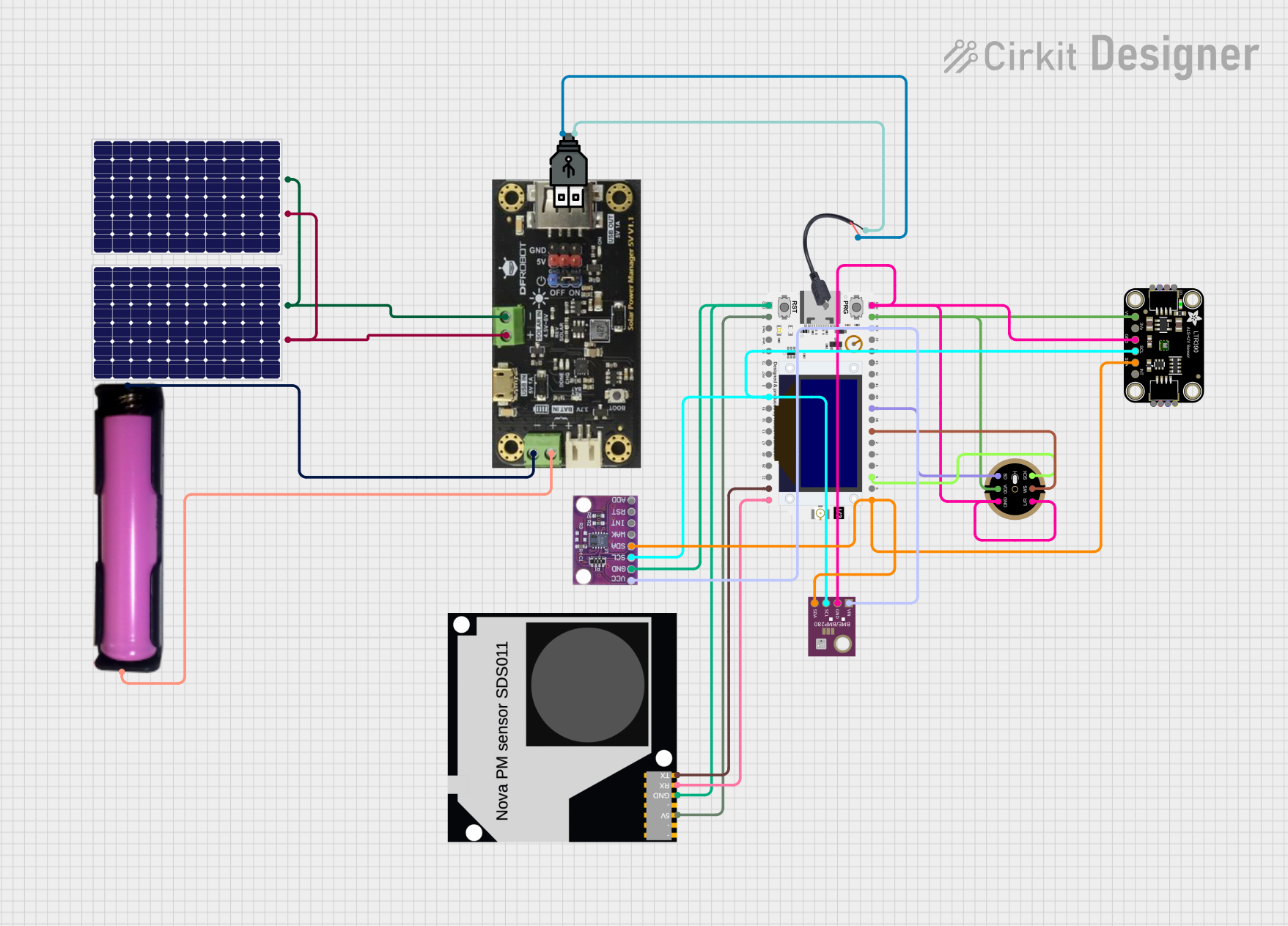
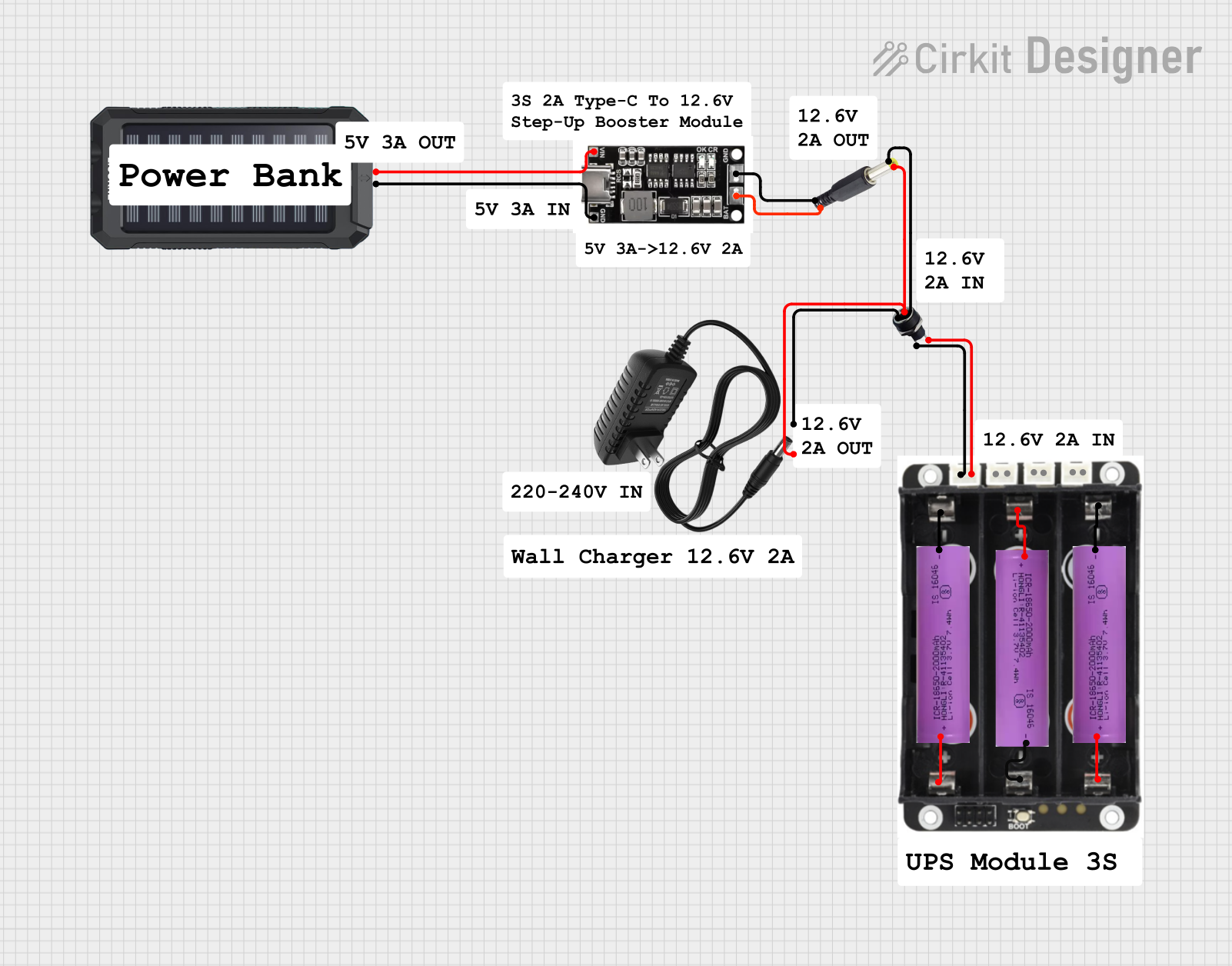
Explore Projects Built with BL-M8812EU2
Common Applications
- Robotics (e.g., robotic arms, mobile robots)
- Industrial automation systems
- Electric vehicles and drones
- Conveyor belts and automated machinery
- Home appliances with brushless motors
Technical Specifications
Key Technical Details
| Parameter | Value |
|---|---|
| Operating Voltage Range | 6V to 24V |
| Maximum Output Current | 2.5A per phase |
| Control Interface | PWM, Direction, and Enable |
| Motor Type Supported | Brushless DC (BLDC) motors |
| Efficiency | Up to 95% |
| Operating Temperature | -20°C to 85°C |
| Protection Features | Overcurrent, Overtemperature, |
| and Undervoltage Lockout |
Pin Configuration and Descriptions
| Pin Number | Pin Name | Description |
|---|---|---|
| 1 | VCC | Power supply input (6V to 24V). Connect to the positive terminal of the DC |
| power source. | ||
| 2 | GND | Ground connection. Connect to the negative terminal of the DC power source. |
| 3 | PWM | Pulse Width Modulation input for speed control. Accepts a PWM signal with |
| a frequency range of 1kHz to 20kHz. | ||
| 4 | DIR | Direction control input. Logic HIGH sets the motor to rotate clockwise, |
| while logic LOW sets it to rotate counterclockwise. | ||
| 5 | EN | Enable input. Logic HIGH enables the motor driver, and logic LOW disables |
| it. | ||
| 6, 7, 8 | U, V, W | Outputs to the three phases of the brushless motor. |
Usage Instructions
How to Use the BL-M8812EU2 in a Circuit
- Power Supply: Connect the VCC pin to a DC power source within the operating voltage range (6V to 24V). Ensure the power source can supply sufficient current for the motor.
- Ground Connection: Connect the GND pin to the ground of the power source and the circuit.
- Motor Connections: Connect the U, V, and W pins to the three phases of the brushless motor.
- Control Signals:
- Use a PWM signal on the PWM pin to control the motor speed.
- Set the DIR pin HIGH or LOW to control the motor's rotation direction.
- Use the EN pin to enable or disable the motor driver.
- Protection: Ensure proper heat dissipation and avoid exceeding the maximum current rating to prevent damage.
Important Considerations and Best Practices
- Use a decoupling capacitor (e.g., 100µF) near the VCC and GND pins to stabilize the power supply.
- Ensure the PWM signal frequency is within the specified range (1kHz to 20kHz) for optimal performance.
- Avoid reversing the power supply polarity, as this may damage the component.
- If using an Arduino UNO or similar microcontroller, ensure the control signals (PWM, DIR, EN) are within the logic level range (0V to 5V).
Example Arduino Code
Below is an example of how to control the BL-M8812EU2 using an Arduino UNO:
// Define pin connections
const int pwmPin = 9; // PWM signal pin
const int dirPin = 8; // Direction control pin
const int enPin = 7; // Enable pin
void setup() {
// Set pin modes
pinMode(pwmPin, OUTPUT);
pinMode(dirPin, OUTPUT);
pinMode(enPin, OUTPUT);
// Initialize motor driver
digitalWrite(enPin, HIGH); // Enable the motor driver
digitalWrite(dirPin, HIGH); // Set direction to clockwise
}
void loop() {
// Set motor speed using PWM (0 to 255)
analogWrite(pwmPin, 128); // 50% duty cycle for medium speed
delay(5000); // Run for 5 seconds
// Change direction
digitalWrite(dirPin, LOW); // Set direction to counterclockwise
delay(5000); // Run for 5 seconds
}
Troubleshooting and FAQs
Common Issues and Solutions
Motor Not Spinning:
- Ensure the EN pin is set to HIGH to enable the motor driver.
- Verify that the PWM signal is being generated correctly.
- Check the motor connections (U, V, W) for proper wiring.
Motor Spins in the Wrong Direction:
- Check the logic level of the DIR pin. Set it HIGH for clockwise rotation and LOW for counterclockwise rotation.
Overheating:
- Ensure proper heat dissipation by using a heatsink or cooling fan if necessary.
- Verify that the motor current does not exceed the maximum rating (2.5A per phase).
No Response from the Driver:
- Check the power supply voltage and ensure it is within the operating range (6V to 24V).
- Inspect all connections for loose wires or poor soldering.
FAQs
Q1: Can the BL-M8812EU2 drive a brushed DC motor?
A1: No, the BL-M8812EU2 is specifically designed for brushless DC (BLDC) motors and is not compatible with brushed motors.
Q2: What happens if the PWM frequency is outside the specified range?
A2: Operating outside the 1kHz to 20kHz range may result in erratic motor behavior or reduced efficiency.
Q3: Can I use the BL-M8812EU2 with a 3.3V microcontroller?
A3: Yes, but you may need a level shifter to ensure the control signals are compatible with the driver's logic level requirements.
Q4: Does the driver support regenerative braking?
A4: No, the BL-M8812EU2 does not support regenerative braking. Use external circuitry if this feature is required.