How to Use stepper driver: Examples, Pinouts, and Specs

Introduction
The TB6600 stepper driver is a widely-used electronic component designed to drive stepper motors, which are commonly used in CNC machines, 3D printers, and other precision motion control applications. The TB6600 provides an easy and efficient way to control stepper motors with high precision and reliability.
Explore Projects Built with stepper driver

Explore Projects Built with stepper driver
Technical Specifications
Key Technical Details
- Supply Voltage: 9V to 42V DC
- Output Current: Adjustable from 0.5A to 4.0A (peak)
- Input Signal Voltage: 3.3V to 24V (high level)
- Microstepping: Full, 1/2, 1/4, 1/8, 1/16, 1/32 selectable
- Operating Temperature: -10°C to 45°C
- Dimensions: 96mm x 71mm x 39mm
Pin Configuration and Descriptions
| Pin Number | Pin Name | Description |
|---|---|---|
| 1 | ENA+ | Enable signal positive |
| 2 | ENA- | Enable signal negative |
| 3 | DIR+ | Direction signal positive |
| 4 | DIR- | Direction signal negative |
| 5 | PUL+ | Pulse signal positive |
| 6 | PUL- | Pulse signal negative |
| 7 | A+ | Motor coil A positive |
| 8 | A- | Motor coil A negative |
| 9 | B+ | Motor coil B positive |
| 10 | B- | Motor coil B negative |
| 11 | VCC | Power supply positive |
| 12 | GND | Power supply ground |
Usage Instructions
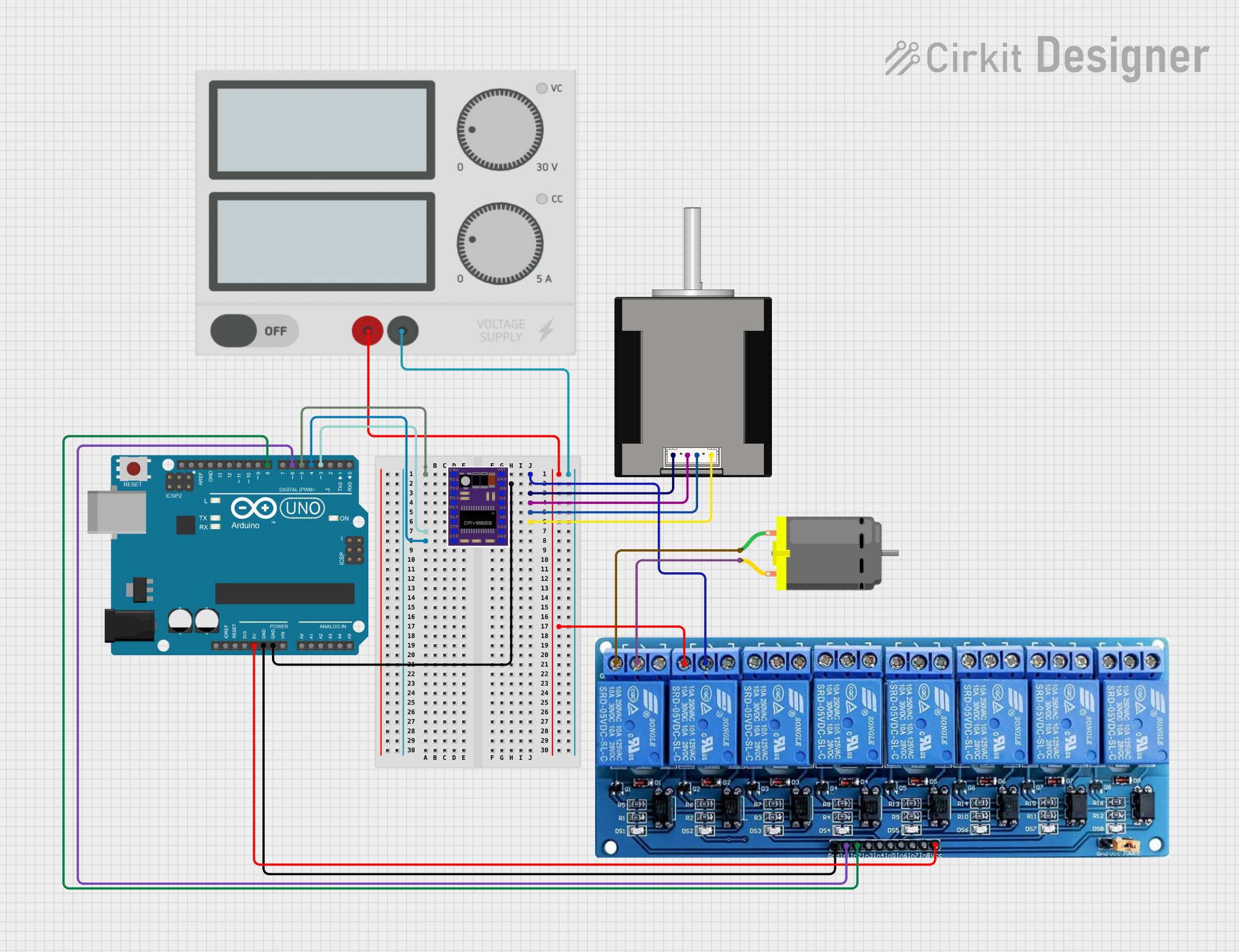
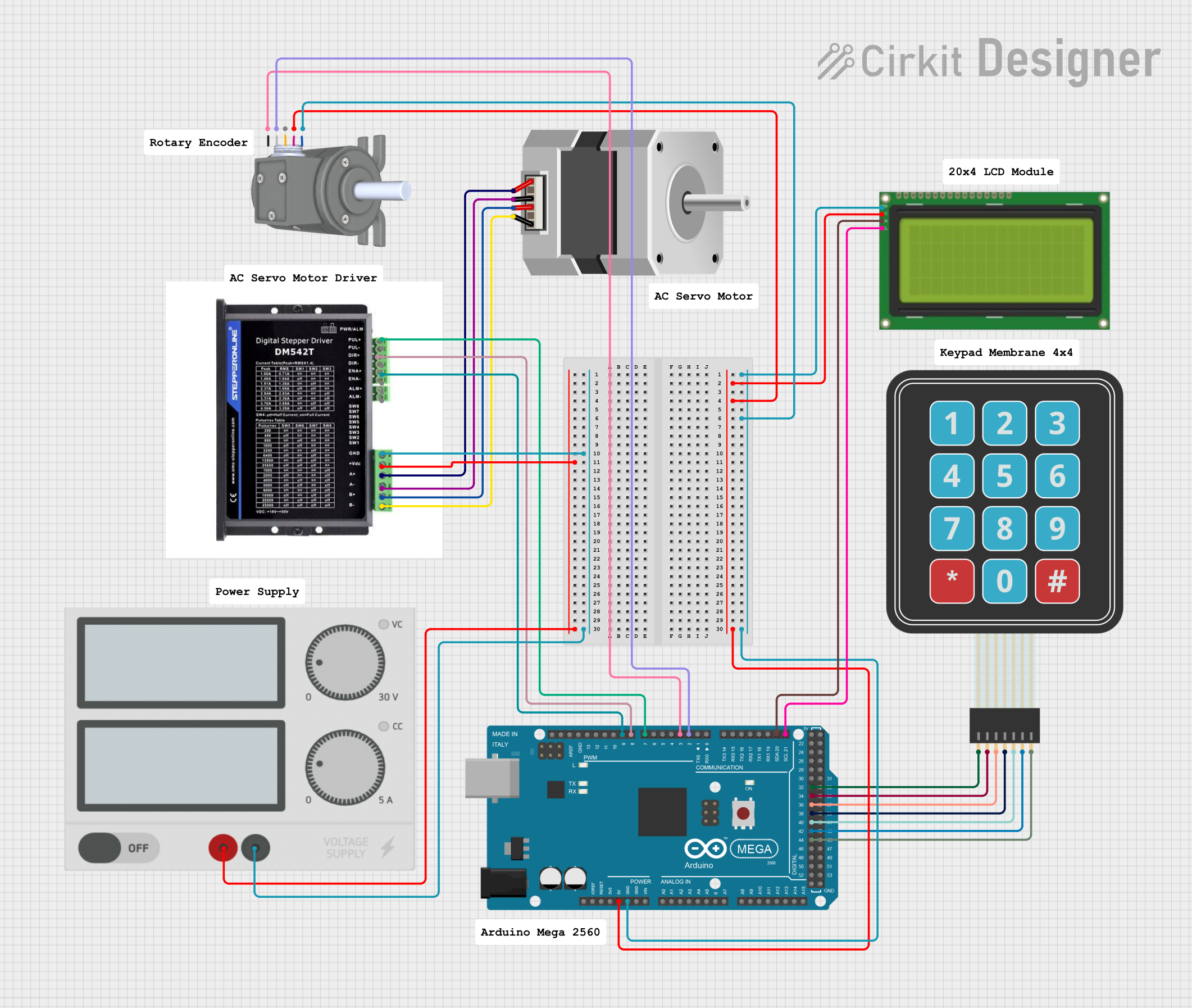
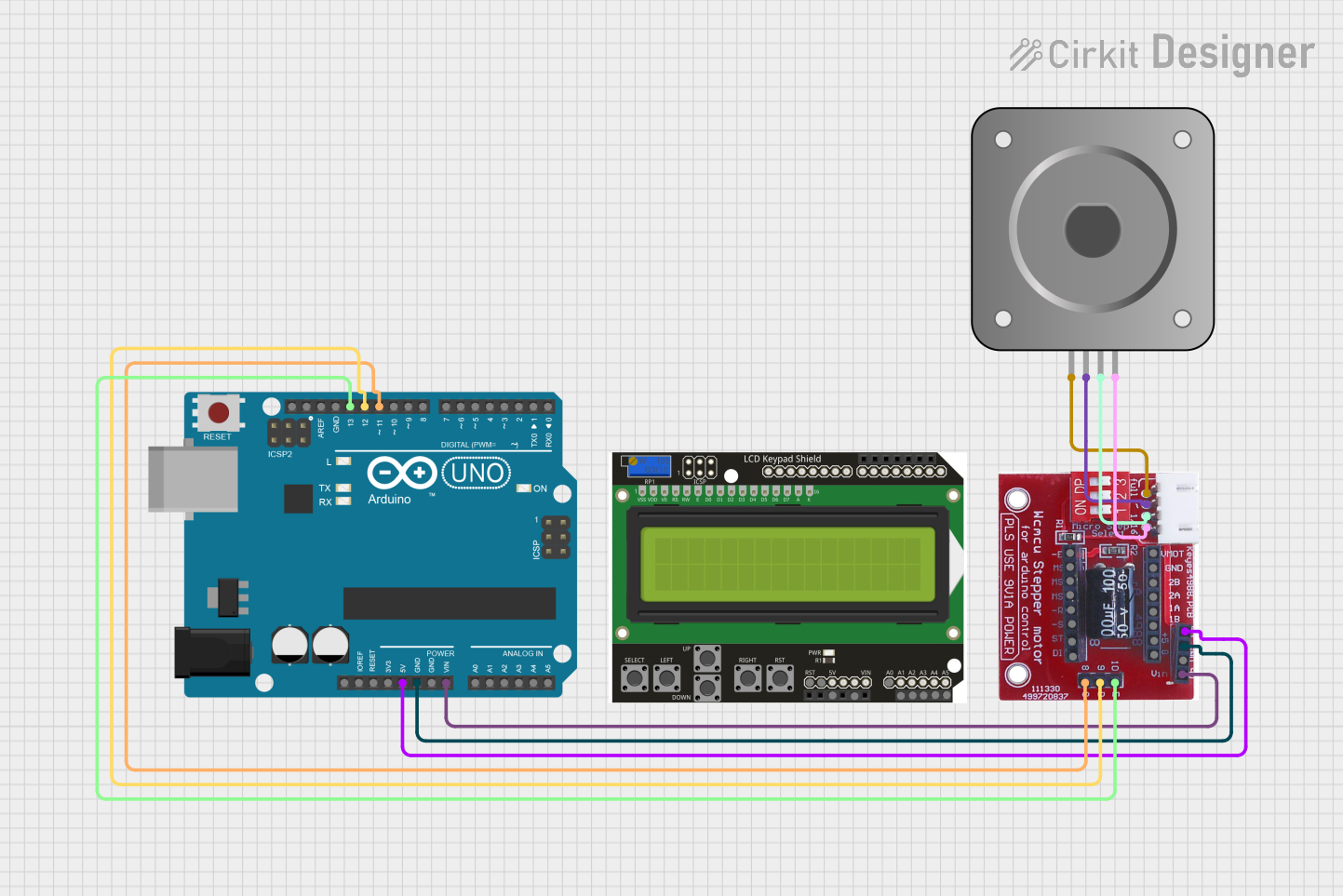
Connecting the TB6600 to a Stepper Motor
- Power Supply: Connect a DC power supply to the VCC and GND pins, ensuring the voltage is within the specified range.
- Motor Connection: Connect the motor coils to the A+ and A-, and B+ and B- terminals.
- Control Signals: Connect the ENA+, DIR+, and PUL+ to the respective control signals, and ENA-, DIR-, and PUL- to the ground or negative control signals.
Important Considerations and Best Practices
- Always ensure the power supply is turned off before making any connections.
- Set the current limit according to the motor's specifications to prevent damage.
- Use appropriate heat sinks if operating at high currents for extended periods.
- Microstepping settings should be configured based on the application's precision requirements.
Example Code for Arduino UNO
// Define the stepper motor connections and steps per revolution
#define dirPin 2
#define stepPin 3
#define stepsPerRevolution 200
void setup() {
// Set the motor control pins as outputs
pinMode(dirPin, OUTPUT);
pinMode(stepPin, OUTPUT);
}
void loop() {
// Set the spinning direction clockwise
digitalWrite(dirPin, HIGH);
// Spin the motor one revolution slowly
for (int i = 0; i < stepsPerRevolution; i++) {
// These four lines result in 1 step:
digitalWrite(stepPin, HIGH);
delayMicroseconds(2000);
digitalWrite(stepPin, LOW);
delayMicroseconds(2000);
}
delay(1000); // Wait a second
// Set the spinning direction counterclockwise
digitalWrite(dirPin, LOW);
// Spin the motor one revolution quickly
for (int i = 0; i < stepsPerRevolution; i++) {
// These four lines result in 1 step:
digitalWrite(stepPin, HIGH);
delayMicroseconds(1000); // This delay controls the speed
digitalWrite(stepPin, LOW);
delayMicroseconds(1000);
}
delay(1000); // Wait a second
}
Troubleshooting and FAQs
Common Issues
- Motor not moving: Check power supply, connections, and ensure the enable pin is set correctly.
- Motor stalling or skipping steps: Adjust current limit, check for mechanical obstructions, or reduce speed.
- Overheating: Ensure proper current settings and use heat sinks if necessary.
FAQs
Q: Can I use the TB6600 with a 5V logic controller? A: Yes, the TB6600 is compatible with 3.3V to 24V logic levels.
Q: How do I set the current limit on the TB6600? A: The current limit is set using the onboard dip switches according to the motor's specifications.
Q: What is the maximum stepping frequency for the TB6600? A: The TB6600 can handle a maximum pulse frequency of up to 200kHz.
For further assistance, consult the manufacturer's datasheet and technical support resources.