How to Use 6 axis Accelerometer and Gyroscope: Examples, Pinouts, and Specs
Introduction
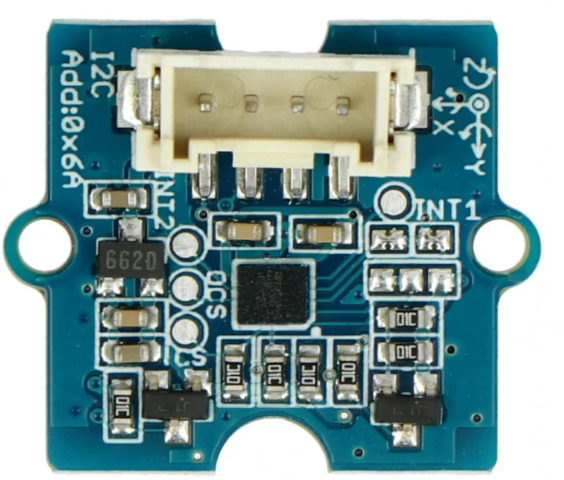
The Grove 6-Axis Accelerometer and Gyroscope is a versatile motion sensor that integrates both an accelerometer and a gyroscope into a single module. This sensor is capable of measuring acceleration and angular velocity across three axes (X, Y, and Z), making it ideal for applications requiring precise motion tracking and orientation data.
Explore Projects Built with 6 axis Accelerometer and Gyroscope
Explore Projects Built with 6 axis Accelerometer and Gyroscope
Common Applications
- Robotics and drone navigation
- Gesture recognition
- Gaming and virtual reality systems
- Fitness and health tracking devices
- Industrial equipment monitoring
Technical Specifications
The following table outlines the key technical details of the Grove 6-Axis Accelerometer and Gyroscope:
| Parameter | Value |
|---|---|
| Operating Voltage | 3.3V / 5V |
| Communication Protocol | I2C |
| Accelerometer Range | ±2g, ±4g, ±8g, ±16g |
| Gyroscope Range | ±250°/s, ±500°/s, ±1000°/s, ±2000°/s |
| Operating Temperature | -40°C to +85°C |
| Dimensions | 20mm x 40mm |
Pin Configuration
The Grove 6-Axis Accelerometer and Gyroscope module has a standard Grove connector with the following pinout:
| Pin | Name | Description |
|---|---|---|
| 1 | VCC | Power supply (3.3V or 5V) |
| 2 | GND | Ground |
| 3 | SDA | I2C data line |
| 4 | SCL | I2C clock line |
Usage Instructions
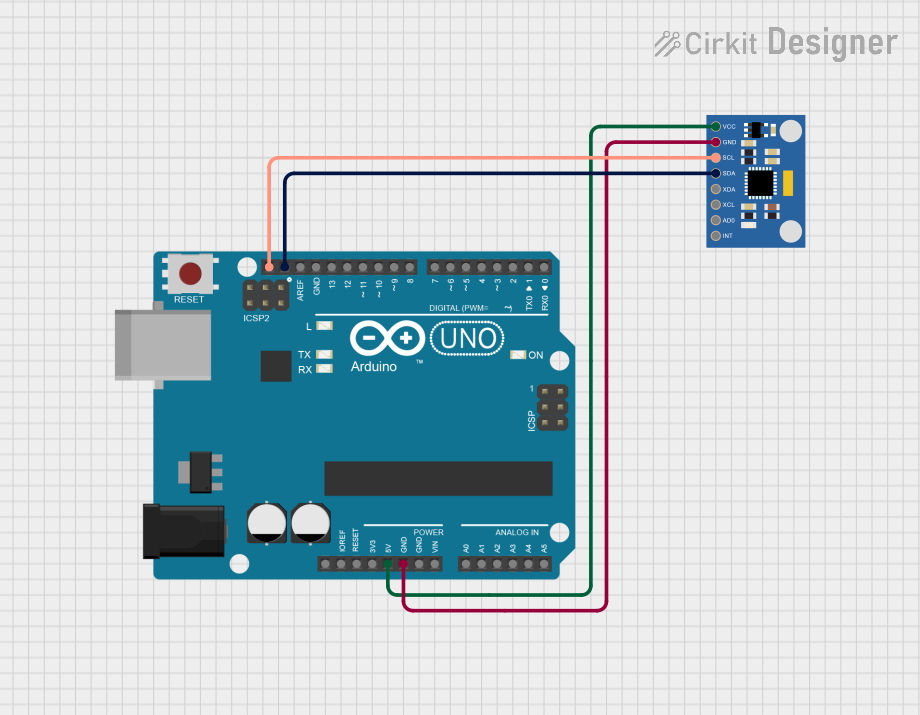
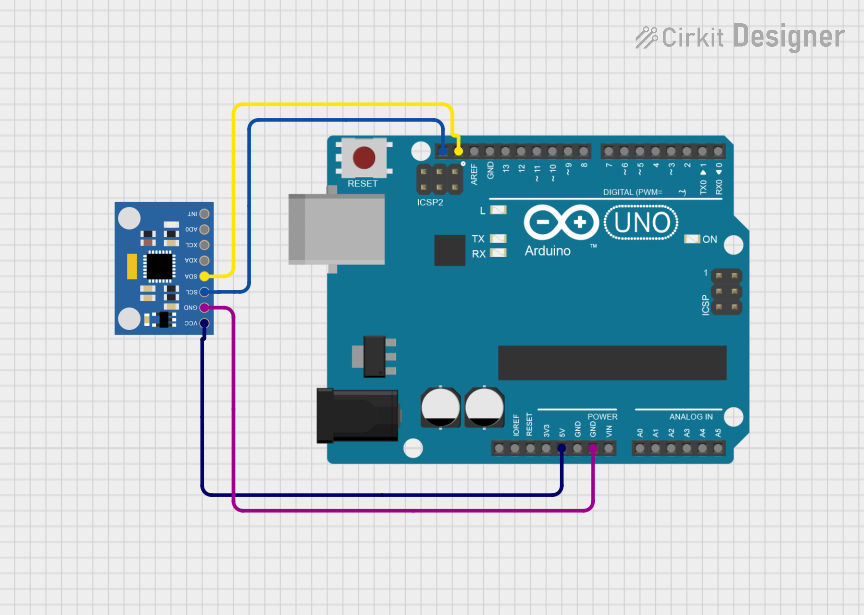
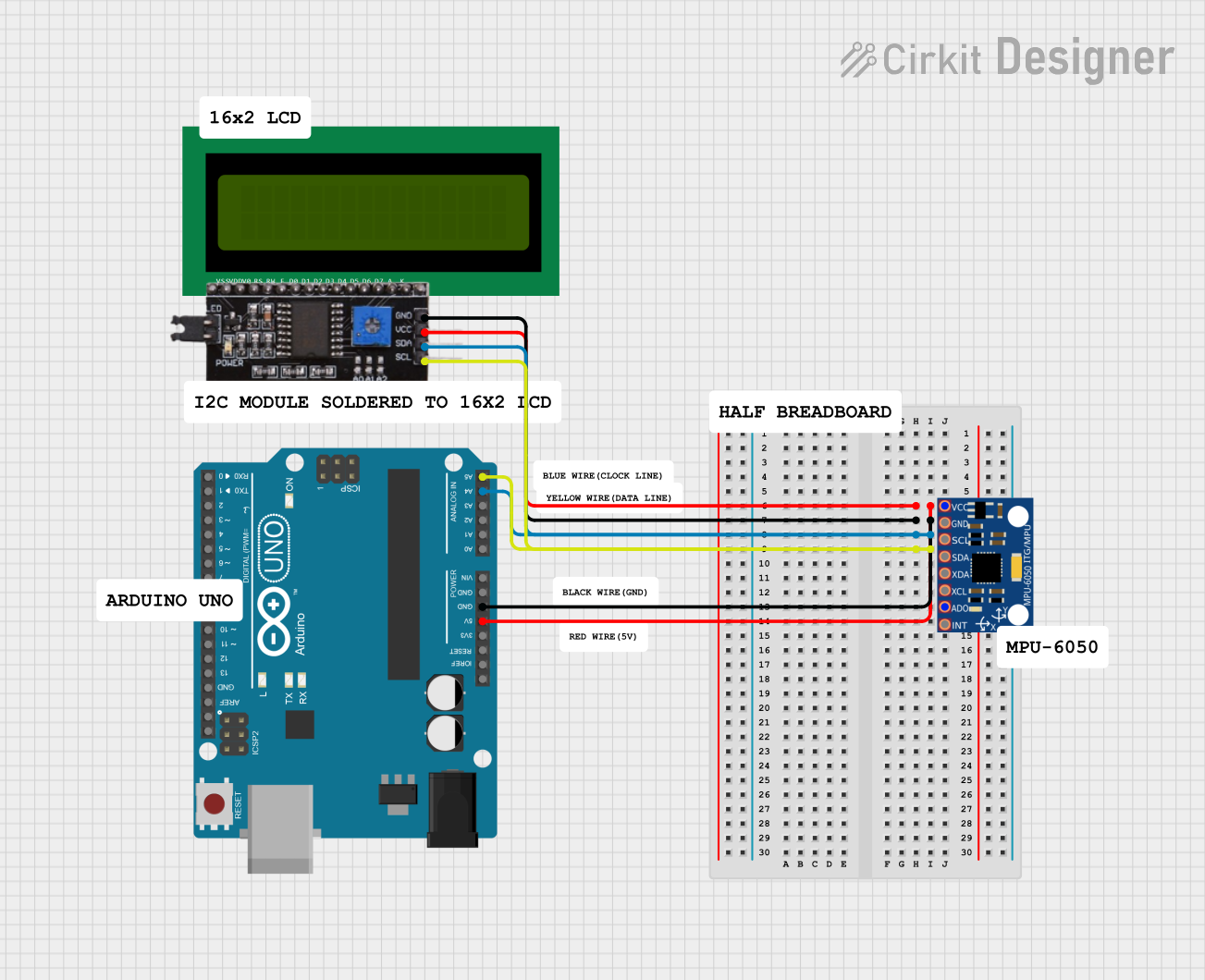
Connecting the Sensor
Hardware Setup:
- Connect the Grove 6-Axis Accelerometer and Gyroscope to an I2C port on a Grove Base Shield.
- Attach the Base Shield to an Arduino UNO or compatible microcontroller.
- Ensure the power supply matches the sensor's operating voltage (3.3V or 5V).
Software Setup:
- Install the required library for the sensor. For example, if the sensor uses the MPU6050 chip, install the
MPU6050library from the Arduino Library Manager.
- Install the required library for the sensor. For example, if the sensor uses the MPU6050 chip, install the
Sample Arduino Code
Below is an example code to read acceleration and gyroscope data from the sensor:
#include <Wire.h>
#include <MPU6050.h> // Include the MPU6050 library
MPU6050 mpu; // Create an MPU6050 object
void setup() {
Serial.begin(9600); // Initialize serial communication
Wire.begin(); // Initialize I2C communication
// Initialize the MPU6050 sensor
if (!mpu.begin(MPU6050_SCALE_2000DPS, MPU6050_RANGE_16G)) {
Serial.println("Could not find a valid MPU6050 sensor, check connections!");
while (1);
}
Serial.println("MPU6050 initialized successfully!");
}
void loop() {
// Read acceleration and gyroscope data
Vector rawAccel = mpu.readRawAccel();
Vector rawGyro = mpu.readRawGyro();
// Print acceleration data
Serial.print("Accel X: "); Serial.print(rawAccel.XAxis);
Serial.print(" | Accel Y: "); Serial.print(rawAccel.YAxis);
Serial.print(" | Accel Z: "); Serial.println(rawAccel.ZAxis);
// Print gyroscope data
Serial.print("Gyro X: "); Serial.print(rawGyro.XAxis);
Serial.print(" | Gyro Y: "); Serial.print(rawGyro.YAxis);
Serial.print(" | Gyro Z: "); Serial.println(rawGyro.ZAxis);
delay(500); // Delay for readability
}
Important Considerations
- Power Supply: Ensure the sensor is powered with the correct voltage (3.3V or 5V).
- I2C Address: The default I2C address for the sensor may vary. Check the datasheet or library documentation for the correct address.
- Mounting Orientation: Properly align the sensor to ensure accurate motion tracking.
Troubleshooting and FAQs
Common Issues
No Data Output:
- Cause: Incorrect wiring or loose connections.
- Solution: Verify the connections between the sensor and the microcontroller.
Incorrect Readings:
- Cause: Improper sensor calibration.
- Solution: Use the library's calibration functions to calibrate the sensor.
I2C Communication Failure:
- Cause: Address conflict or incorrect I2C address.
- Solution: Check the sensor's I2C address and ensure no other devices on the bus share the same address.
FAQs
Q: Can this sensor be used with a Raspberry Pi?
A: Yes, the sensor can be used with a Raspberry Pi via the I2C interface. Ensure the appropriate libraries are installed.
Q: How do I change the sensor's sensitivity range?
A: The sensitivity range can be configured in the library's initialization function. Refer to the library documentation for details.
Q: Is the sensor affected by temperature changes?
A: The sensor has a built-in temperature compensation mechanism, but extreme temperature variations may still affect accuracy.