How to Use B-G431-ESC1: Examples, Pinouts, and Specs
Introduction
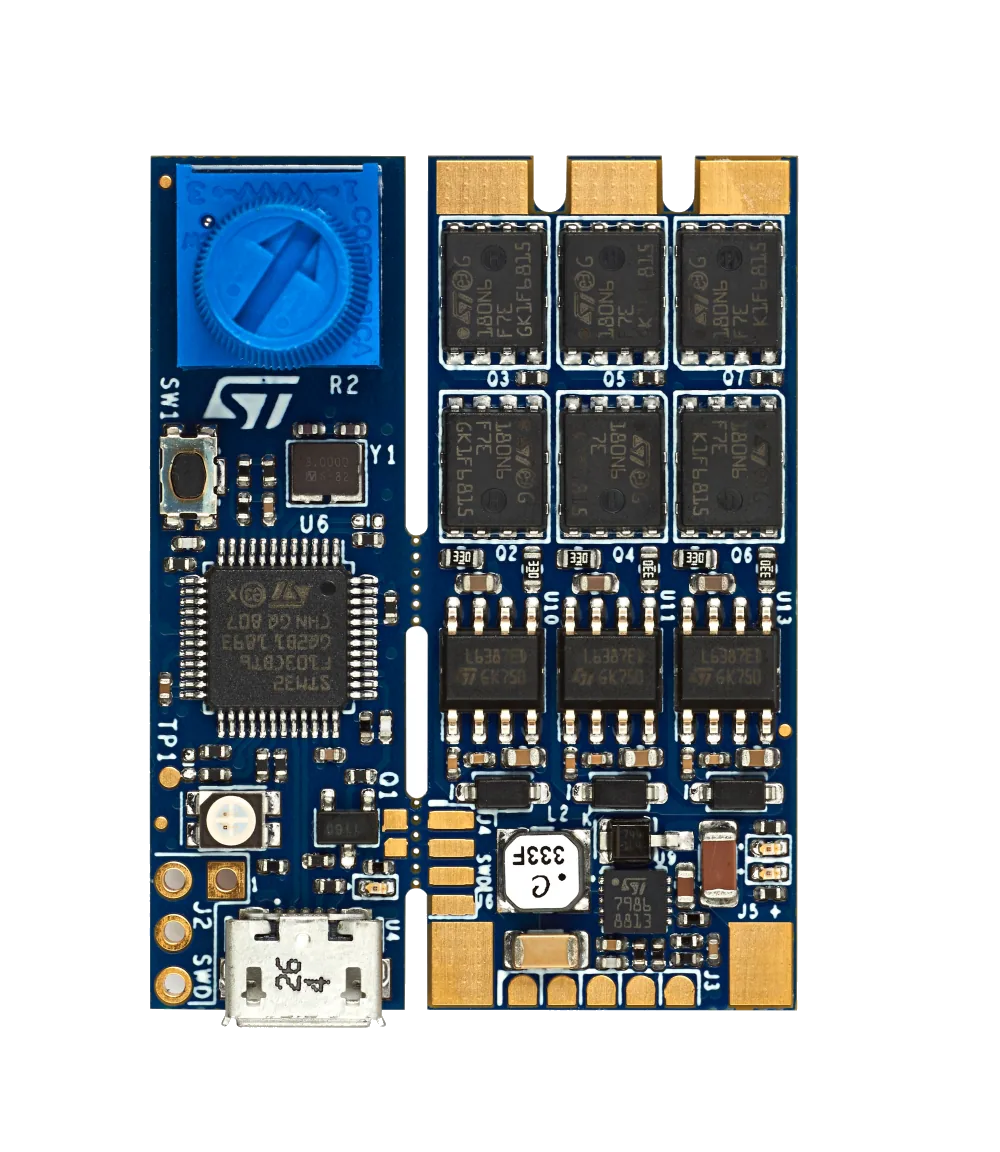
The B-G431-ESC1 is a motor control expansion board designed for driving brushless DC (BLDC) motors. It is equipped with a high-performance STM32G431 microcontroller and integrated power electronics, enabling precise and efficient motor control. This board is ideal for applications in robotics, drones, industrial automation, and other systems requiring advanced motor control.
The B-G431-ESC1 supports various control algorithms, including Field-Oriented Control (FOC), and is compatible with STM32 development tools. Its compact design and robust features make it a versatile choice for developers and engineers working on motor control projects.
Explore Projects Built with B-G431-ESC1



Explore Projects Built with B-G431-ESC1
Common Applications:
- Robotics and automation systems
- Drones and unmanned vehicles
- Industrial motor control
- Electric scooters and e-bikes
- Home appliances with BLDC motors
Technical Specifications
Key Technical Details:
- Microcontroller: STM32G431CBU6 (ARM Cortex-M4, 170 MHz)
- Input Voltage Range: 5.5V to 18V DC
- Maximum Motor Current: 15A (continuous)
- Communication Interfaces: UART, CAN, PWM
- Control Algorithms: Field-Oriented Control (FOC), 6-step commutation
- Integrated Features:
- Three-phase gate driver
- Current sensing for FOC
- Overcurrent and overtemperature protection
- Dimensions: 50mm x 50mm
- Operating Temperature: -40°C to +125°C
Pin Configuration and Descriptions:
The B-G431-ESC1 features multiple connectors for power, motor phases, and communication. Below is the pin configuration:
Power and Motor Connections:
| Pin Name | Description |
|---|---|
| VIN | Input voltage (5.5V to 18V DC) |
| GND | Ground |
| U, V, W | Motor phase connections |
Communication and Control:
| Pin Name | Description |
|---|---|
| UART_TX | UART transmit for communication |
| UART_RX | UART receive for communication |
| CAN_H | CAN bus high line |
| CAN_L | CAN bus low line |
| PWM_IN | PWM input for motor control |
| ENABLE | Enable signal for motor operation |
Debug and Programming:
| Pin Name | Description |
|---|---|
| SWDIO | Serial Wire Debug I/O |
| SWCLK | Serial Wire Clock |
| NRST | Reset pin for microcontroller |
Usage Instructions
How to Use the B-G431-ESC1 in a Circuit:
- Power Supply: Connect a DC power source (5.5V to 18V) to the VIN and GND pins. Ensure the power supply can handle the motor's current requirements.
- Motor Connection: Connect the three motor phase wires to the U, V, and W terminals. Ensure the connections are secure.
- Control Signal: Use the PWM_IN pin to provide a PWM signal for motor speed control. Alternatively, use UART or CAN for advanced control.
- Enable Signal: Pull the ENABLE pin high to activate the motor driver.
- Programming and Debugging: Use the SWDIO and SWCLK pins to program the STM32G431 microcontroller with custom firmware.
Important Considerations:
- Cooling: Ensure adequate cooling for the board, especially when operating at high currents.
- Protection: Verify that the motor and power supply are within the board's voltage and current limits to avoid damage.
- Firmware: Use STM32CubeIDE or other STM32 development tools to program the microcontroller. Preloaded firmware may already support basic motor control.
Example Code for Arduino UNO:
The B-G431-ESC1 can be controlled via UART from an Arduino UNO. Below is an example code snippet:
#include <SoftwareSerial.h>
// Define UART pins for communication with B-G431-ESC1
SoftwareSerial ESC1Serial(10, 11); // RX = pin 10, TX = pin 11
void setup() {
// Initialize serial communication
Serial.begin(9600); // For debugging
ESC1Serial.begin(9600); // Communication with B-G431-ESC1
// Send initialization command to ESC1
ESC1Serial.println("INIT"); // Example command to initialize the ESC
Serial.println("B-G431-ESC1 initialized.");
}
void loop() {
// Example: Send a PWM duty cycle command to the ESC
int dutyCycle = 50; // Set duty cycle (0-100%)
ESC1Serial.print("PWM:");
ESC1Serial.println(dutyCycle);
// Debug output
Serial.print("Sent PWM duty cycle: ");
Serial.println(dutyCycle);
delay(1000); // Wait 1 second before sending the next command
}
Note: Replace "INIT" and "PWM:<value>" with the actual command set supported by the B-G431-ESC1 firmware.
Troubleshooting and FAQs
Common Issues:
Motor Not Spinning:
- Cause: Incorrect wiring or insufficient power supply.
- Solution: Double-check motor connections and ensure the power supply meets voltage and current requirements.
Overheating:
- Cause: High current draw or inadequate cooling.
- Solution: Add a heatsink or fan to improve cooling. Reduce motor load if possible.
Communication Failure:
- Cause: Incorrect UART or CAN configuration.
- Solution: Verify baud rate and communication settings. Check wiring for UART or CAN connections.
Microcontroller Not Responding:
- Cause: Firmware issue or incorrect programming.
- Solution: Reprogram the STM32G431 using STM32CubeIDE and ensure the firmware is compatible.
FAQs:
Q: Can I use the B-G431-ESC1 with a brushed DC motor?
A: No, the B-G431-ESC1 is specifically designed for brushless DC (BLDC) motors.Q: What is the maximum motor speed supported?
A: The maximum speed depends on the motor's specifications and the control algorithm used. Ensure the motor's RPM is within safe limits for the board's voltage and current ratings.Q: Is the board compatible with other STM32 development tools?
A: Yes, the B-G431-ESC1 is compatible with STM32CubeIDE, STM32CubeMX, and other STM32 development tools.Q: Can I use the board for sensorless motor control?
A: Yes, the board supports sensorless Field-Oriented Control (FOC) for BLDC motors.
This documentation provides a comprehensive guide to using the B-G431-ESC1 for motor control applications. For further assistance, refer to the official datasheet and user manual provided by STMicroelectronics.