How to Use servo motor : Examples, Pinouts, and Specs

Introduction
A servo motor is a rotary actuator that allows for precise control of angular position, velocity, and acceleration. It consists of a motor coupled to a sensor for position feedback, along with a control circuit. Servo motors are widely used in applications requiring accurate movement and positioning, such as robotics, automation systems, RC vehicles, and industrial machinery. Their ability to maintain a specific position makes them ideal for tasks like steering mechanisms, robotic arms, and camera gimbals.
Explore Projects Built with servo motor
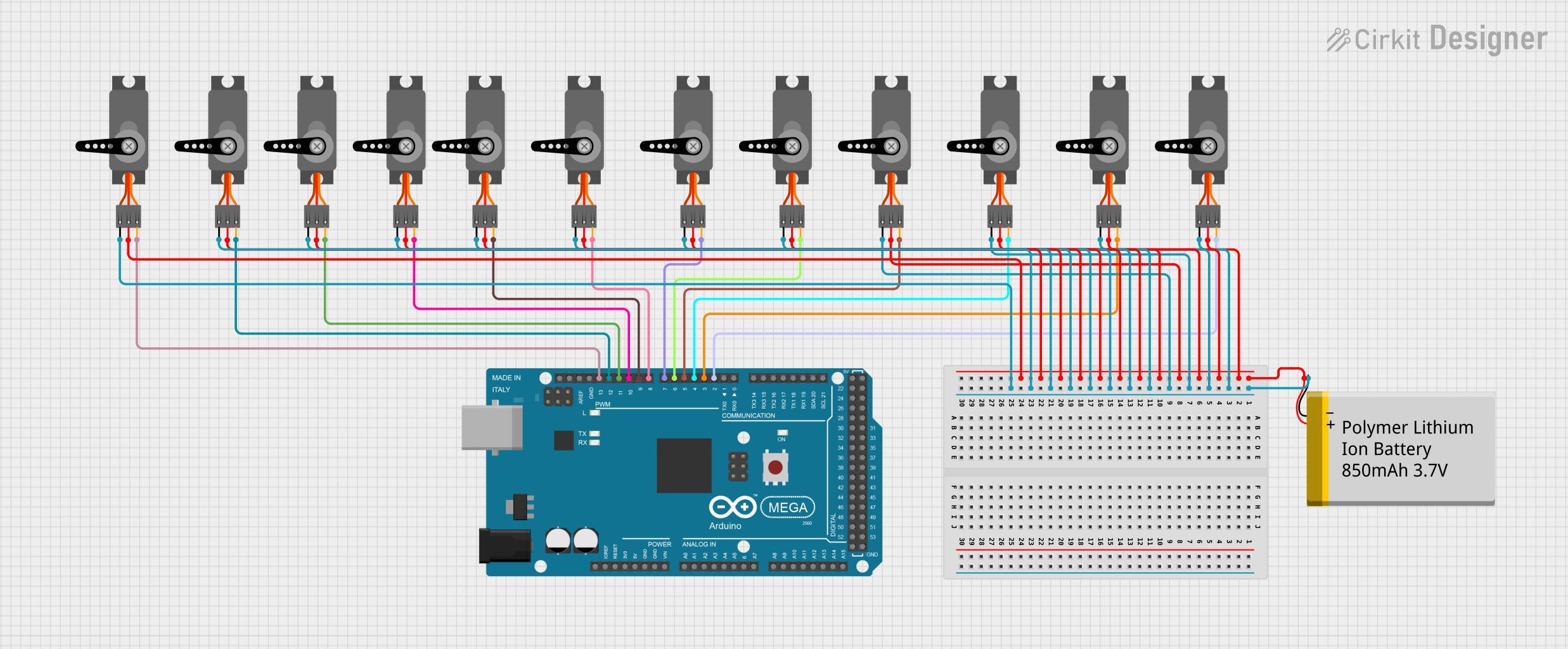
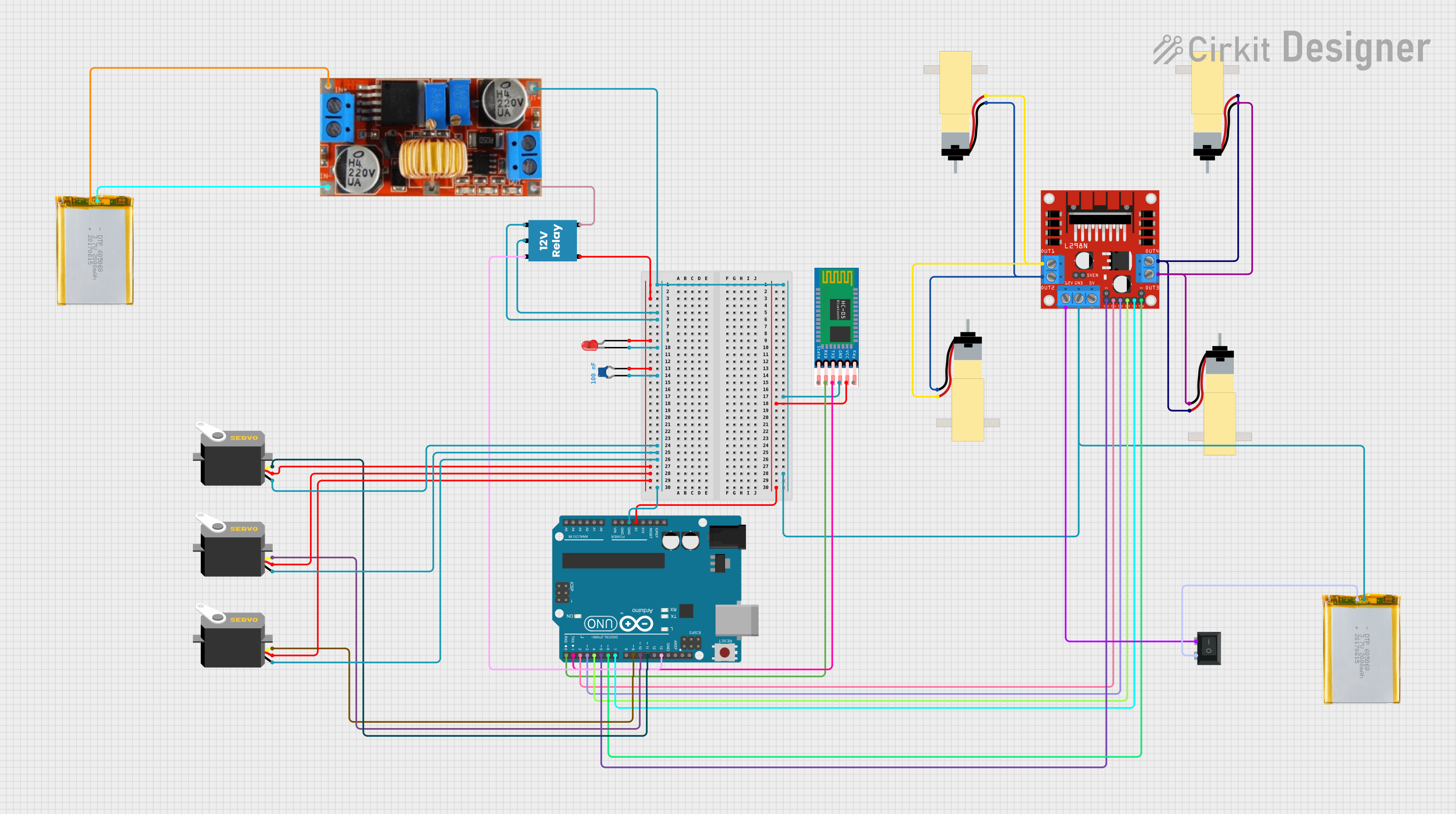
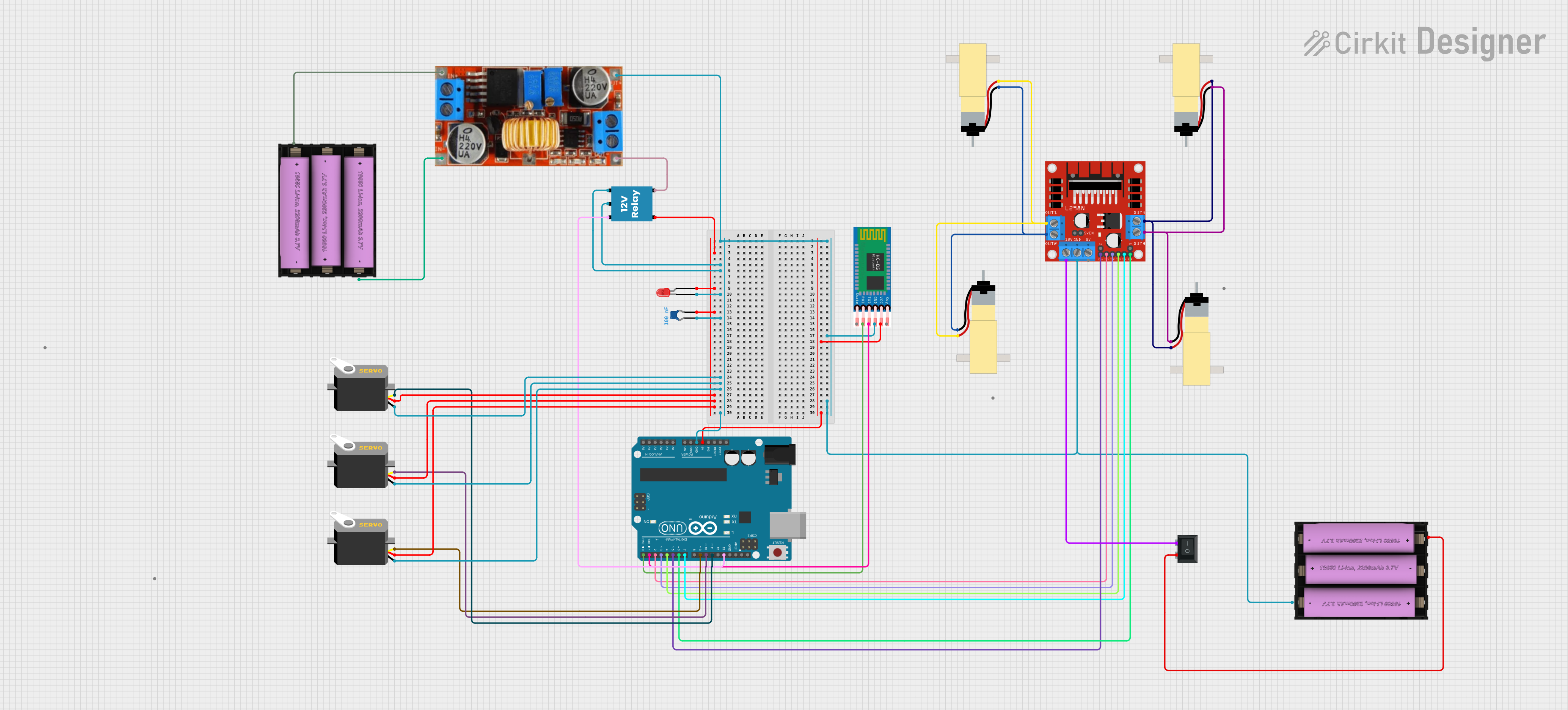
Explore Projects Built with servo motor
Technical Specifications
Servo motors come in various sizes and specifications, but the following are typical for standard hobby servo motors:
| Parameter | Value |
|---|---|
| Operating Voltage | 4.8V to 6V |
| Stall Torque | 1.5 kg·cm to 20 kg·cm (varies) |
| Operating Speed | ~0.1 to 0.2 seconds per 60° |
| Control Signal | PWM (Pulse Width Modulation) |
| PWM Pulse Range | 1 ms to 2 ms (for 0° to 180°) |
| Idle Current | ~10 mA |
| Maximum Current | ~1 A (varies by model) |
| Rotation Range | 0° to 180° (standard) |
| Connector Type | 3-pin (Signal, VCC, GND) |
Pin Configuration
The servo motor typically has a 3-pin connector with the following pinout:
| Pin | Wire Color | Description |
|---|---|---|
| Signal | Orange/White | Receives PWM control signal |
| VCC | Red | Power supply (4.8V to 6V) |
| GND | Brown/Black | Ground connection |
Usage Instructions
How to Use the Servo Motor in a Circuit
- Power Supply: Connect the servo motor's VCC pin to a 5V or 6V power source, depending on the motor's specifications. Ensure the power supply can provide sufficient current (up to 1A for larger servos).
- Ground Connection: Connect the GND pin to the ground of your circuit.
- Control Signal: Connect the Signal pin to a PWM-capable pin on your microcontroller (e.g., Arduino).
- PWM Signal: Generate a PWM signal with a pulse width between 1 ms and 2 ms to control the servo's position:
- 1 ms corresponds to 0°.
- 1.5 ms corresponds to 90° (center position).
- 2 ms corresponds to 180°.
Important Considerations and Best Practices
- Power Supply: Avoid powering the servo motor directly from the microcontroller's 5V pin, as it may not provide enough current. Use an external power source or a dedicated servo driver.
- Decoupling Capacitor: Place a capacitor (e.g., 100 µF) across the power supply lines to reduce voltage fluctuations caused by the servo's operation.
- Avoid Overloading: Do not exceed the servo's torque rating, as this can damage the motor or reduce its lifespan.
- PWM Frequency: Use a PWM frequency of 50 Hz (20 ms period) for standard servo motors.
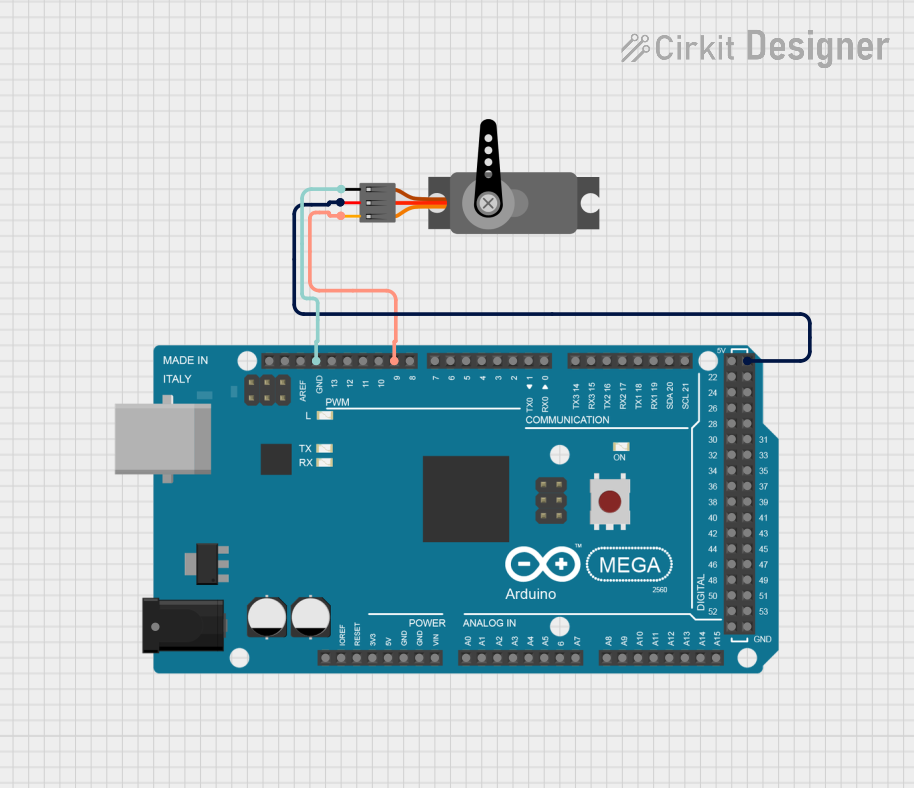
Example: Connecting a Servo Motor to an Arduino UNO
Below is an example code to control a servo motor using an Arduino UNO:
#include <Servo.h> // Include the Servo library
Servo myServo; // Create a Servo object to control the motor
void setup() {
myServo.attach(9); // Attach the servo to pin 9 on the Arduino
}
void loop() {
myServo.write(0); // Move the servo to 0 degrees
delay(1000); // Wait for 1 second
myServo.write(90); // Move the servo to 90 degrees
delay(1000); // Wait for 1 second
myServo.write(180); // Move the servo to 180 degrees
delay(1000); // Wait for 1 second
}
Notes on the Code
- The
Servolibrary simplifies the process of generating PWM signals for servo control. - The
myServo.write(angle)function sets the servo to a specific angle (0° to 180°). - Ensure the servo is connected to a PWM-capable pin (e.g., pin 9 on the Arduino UNO).
Troubleshooting and FAQs
Common Issues and Solutions
Servo Motor Not Moving
- Cause: Insufficient power supply.
- Solution: Use an external power source capable of providing sufficient current.
Servo Jitters or Vibrations
- Cause: Electrical noise or unstable power supply.
- Solution: Add a decoupling capacitor across the power lines and ensure proper grounding.
Servo Overheating
- Cause: Overloading or continuous operation at high torque.
- Solution: Reduce the load on the servo or use a higher-torque model.
Servo Moves Erratically
- Cause: Incorrect PWM signal or loose connections.
- Solution: Verify the PWM signal timing and check all connections.
FAQs
Q: Can I rotate the servo motor beyond 180°?
- A: Standard servo motors are limited to 180°. For continuous rotation, use a continuous rotation servo.
Q: Can I control multiple servos with one Arduino?
- A: Yes, you can control multiple servos using the
Servolibrary, but ensure the power supply can handle the total current draw.
- A: Yes, you can control multiple servos using the
Q: Why does my servo make a buzzing noise?
- A: This is normal when the servo is holding its position under load. However, excessive noise may indicate overloading or a weak power supply.
By following this documentation, you can effectively integrate and troubleshoot a servo motor in your projects.