How to Use Maxbotix MaxSonar Ultrasonic Sensor: Examples, Pinouts, and Specs
Introduction
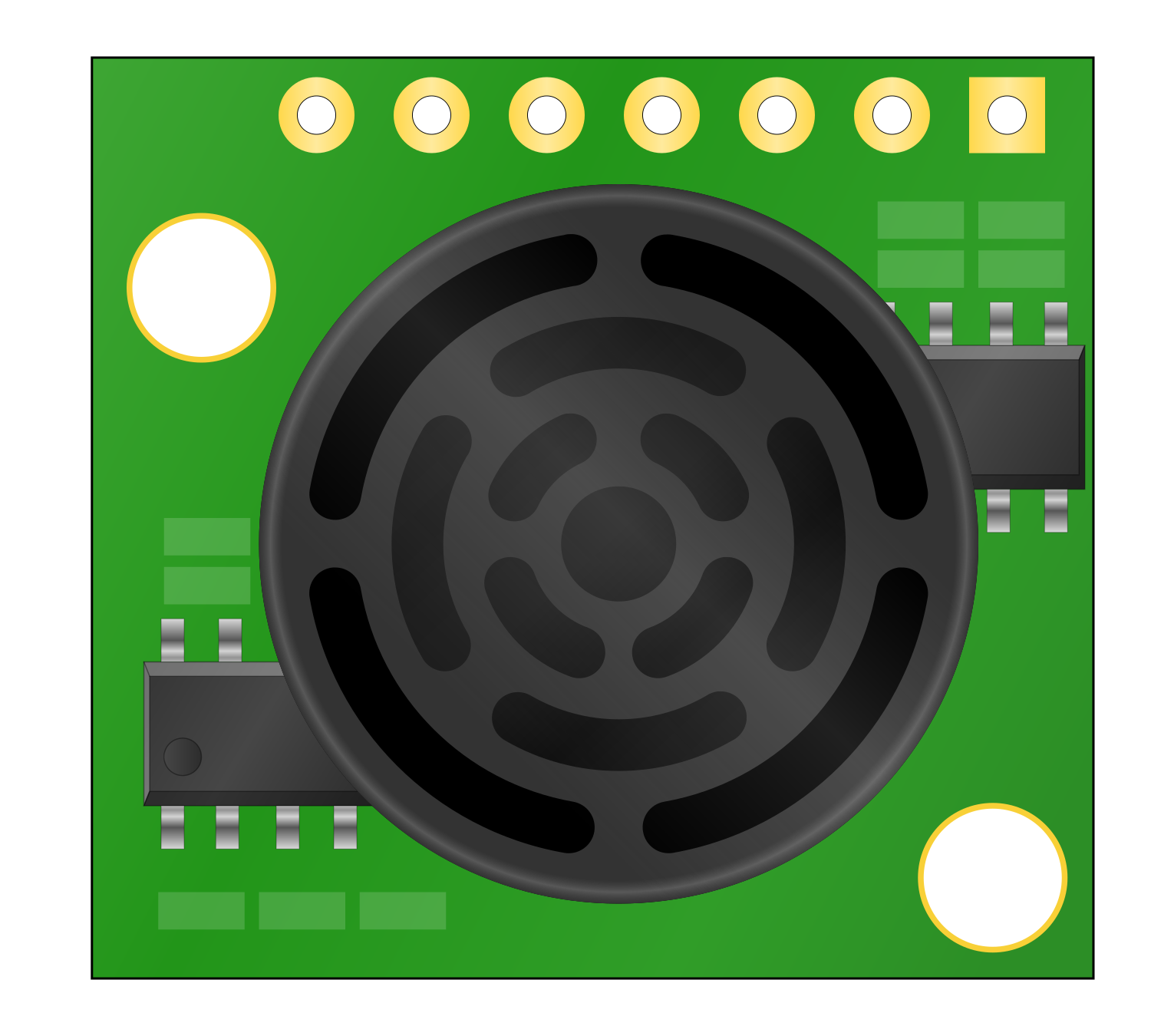
The Maxbotix MaxSonar Ultrasonic Sensor is a compact and versatile sensor capable of measuring distance with high accuracy by emitting ultrasonic sound waves and detecting their reflections. This sensor is widely used in robotics, object detection, proximity sensing, and range finding applications due to its ease of use and reliable performance.
Explore Projects Built with Maxbotix MaxSonar Ultrasonic Sensor
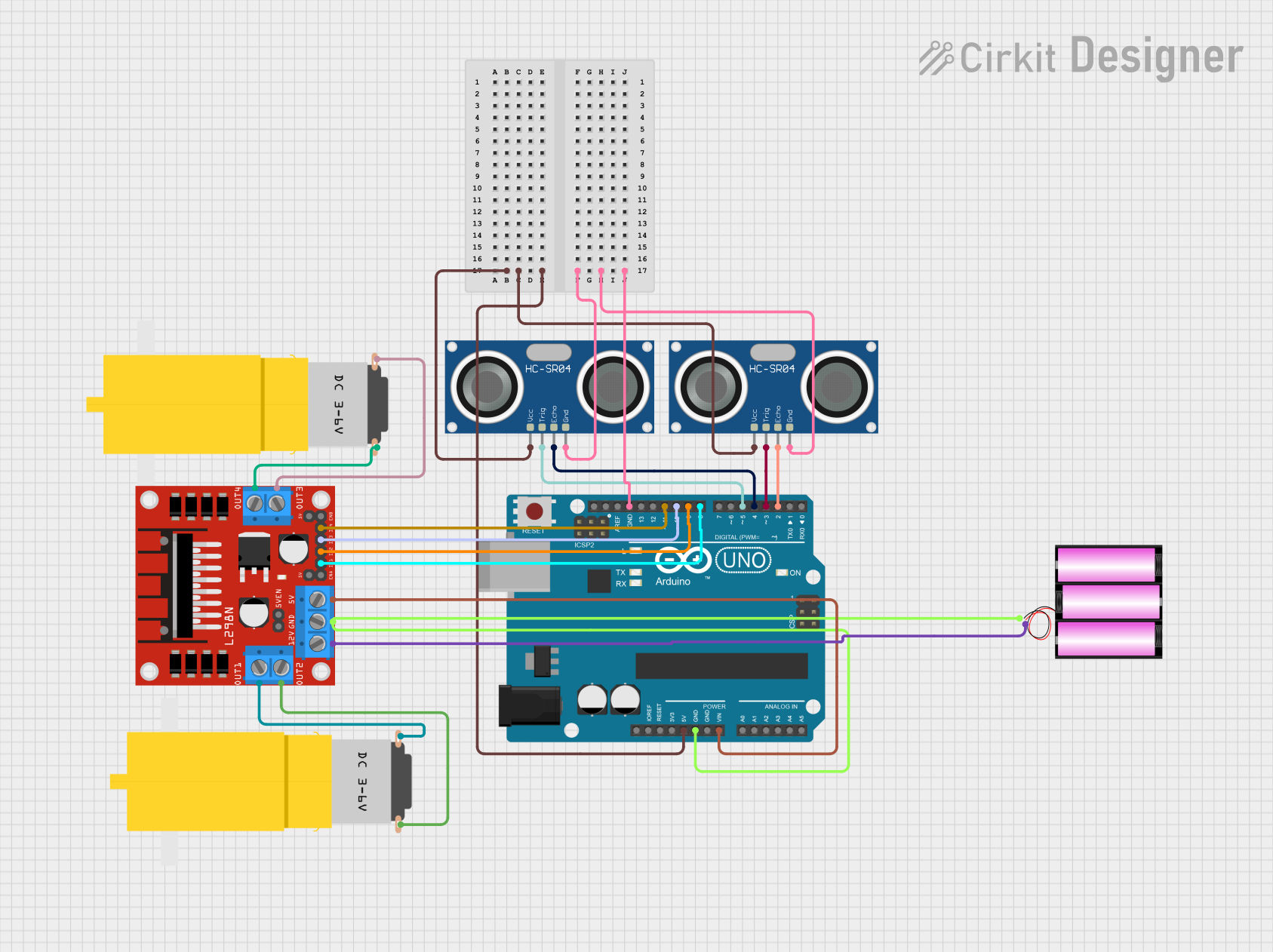
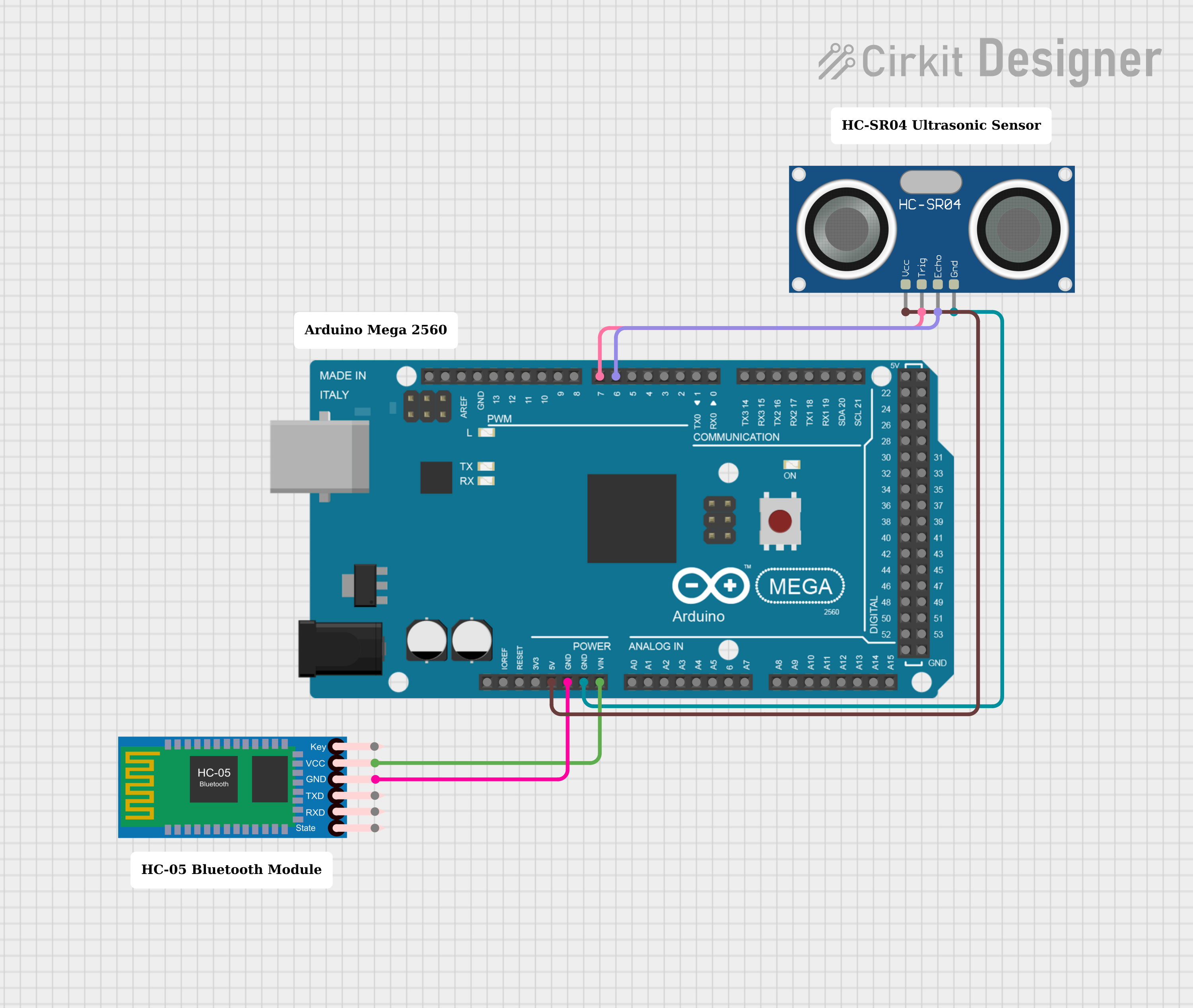
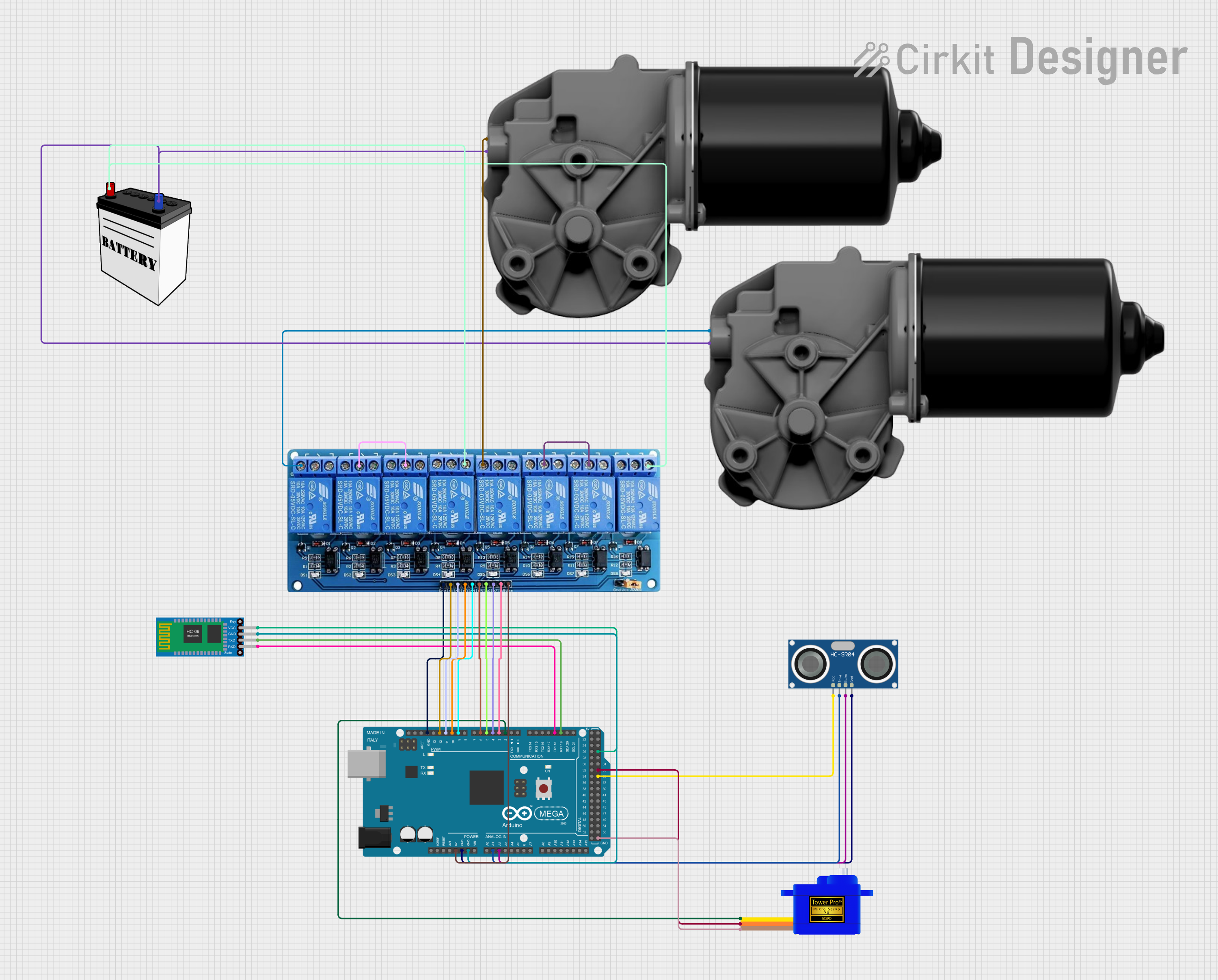
Explore Projects Built with Maxbotix MaxSonar Ultrasonic Sensor
Technical Specifications
Key Technical Details
- Operating Voltage: 3.0V to 5.5V
- Supply Current: 2mA typical; 3.4mA max
- Frequency: 42kHz
- Range: 20cm to 765cm (6.6 feet to 25 feet)
- Resolution: 1cm
- Output: Analog Voltage, PWM, Serial TTL
Pin Configuration and Descriptions
| Pin Number | Name | Description |
|---|---|---|
| 1 | VCC | Power supply input (3.0V to 5.5V) |
| 2 | GND | Ground connection |
| 3 | RX | Serial Receive Pin (optional use) |
| 4 | AN | Analog Output (10mV/inch) |
| 5 | PW | Pulse Width Output |
| 6 | TX | Serial Transmit Pin (optional use) |
Usage Instructions
Connecting to a Circuit
- Connect the VCC pin to the power supply (3.0V to 5.5V).
- Connect the GND pin to the ground of the power supply.
- For analog distance readings, connect the AN pin to an analog input on your microcontroller.
- For PWM distance readings, connect the PW pin to a digital input on your microcontroller.
- If serial communication is desired, connect the TX pin to the RX pin of your microcontroller.
Important Considerations and Best Practices
- Ensure that the power supply is within the specified voltage range to prevent damage.
- Avoid placing the sensor in an environment with strong ultrasonic noise to prevent false readings.
- Mount the sensor away from surfaces that may cause erratic readings due to irregular reflections.
- For consistent readings, allow a brief period for the sensor to stabilize after powering on.
Example Code for Arduino UNO
// Example code for interfacing Maxbotix MaxSonar Ultrasonic Sensor with Arduino UNO
// This example reads the distance from the analog output and prints it to the serial monitor.
const int analogPin = A0; // Analog output from the sensor connected to A0
void setup() {
Serial.begin(9600); // Start serial communication at 9600 baud rate
}
void loop() {
int sensorValue = analogRead(analogPin); // Read the analog value from sensor
float distanceInInches = sensorValue / 2.0; // Convert the value to inches
float distanceInCm = distanceInInches * 2.54; // Convert inches to centimeters
// Print the distance to the Serial Monitor
Serial.print("Distance: ");
Serial.print(distanceInCm);
Serial.println(" cm");
delay(100); // Wait for 100 milliseconds before reading again
}
Troubleshooting and FAQs
Common Issues
- Inaccurate Readings: Ensure there are no obstacles or sound-reflective surfaces too close to the sensor that may cause false readings.
- No Readings: Check the power supply and wiring connections. Ensure the sensor is correctly powered.
Solutions and Tips for Troubleshooting
- Sensor Calibration: If the readings are consistently off, you may need to calibrate the sensor by adjusting the scaling factor in the code.
- Interference: Use the sensor in an environment with minimal ultrasonic interference from other devices.
FAQs
Q: Can the sensor be used outdoors? A: Yes, but it should be protected from water and extreme weather conditions.
Q: What is the maximum range of the sensor? A: The maximum range is 765cm, but optimal performance is achieved within 25 feet.
Q: How can I increase the sampling rate? A: Decrease the delay in the loop function of the code, but ensure the sensor has enough time to process the signal.
For further assistance, consult the Maxbotix MaxSonar datasheet or contact technical support.