How to Use Adafruit Crickit HAT for Raspberry Pi: Examples, Pinouts, and Specs
Introduction
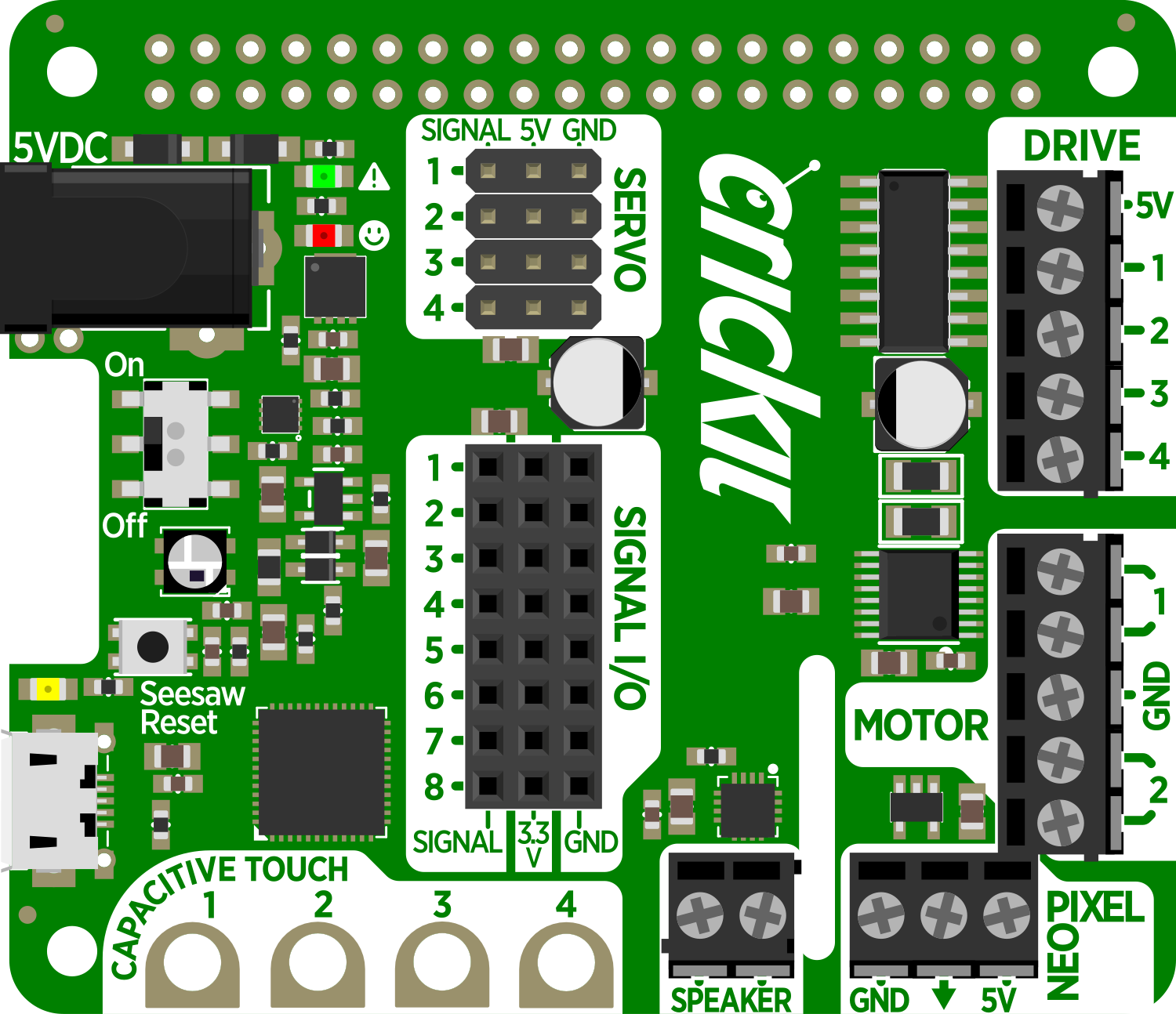
The Adafruit Crickit HAT for Raspberry Pi is an innovative robotics extension board that transforms your Raspberry Pi into a powerful platform for hardware hacking and robotic control. This HAT (Hardware Attached on Top) is designed to work seamlessly with the Raspberry Pi, providing an easy-to-use interface for driving a wide range of actuators including motors, servos, and solenoids, as well as interfacing with sensors and other electronic components.
Explore Projects Built with Adafruit Crickit HAT for Raspberry Pi
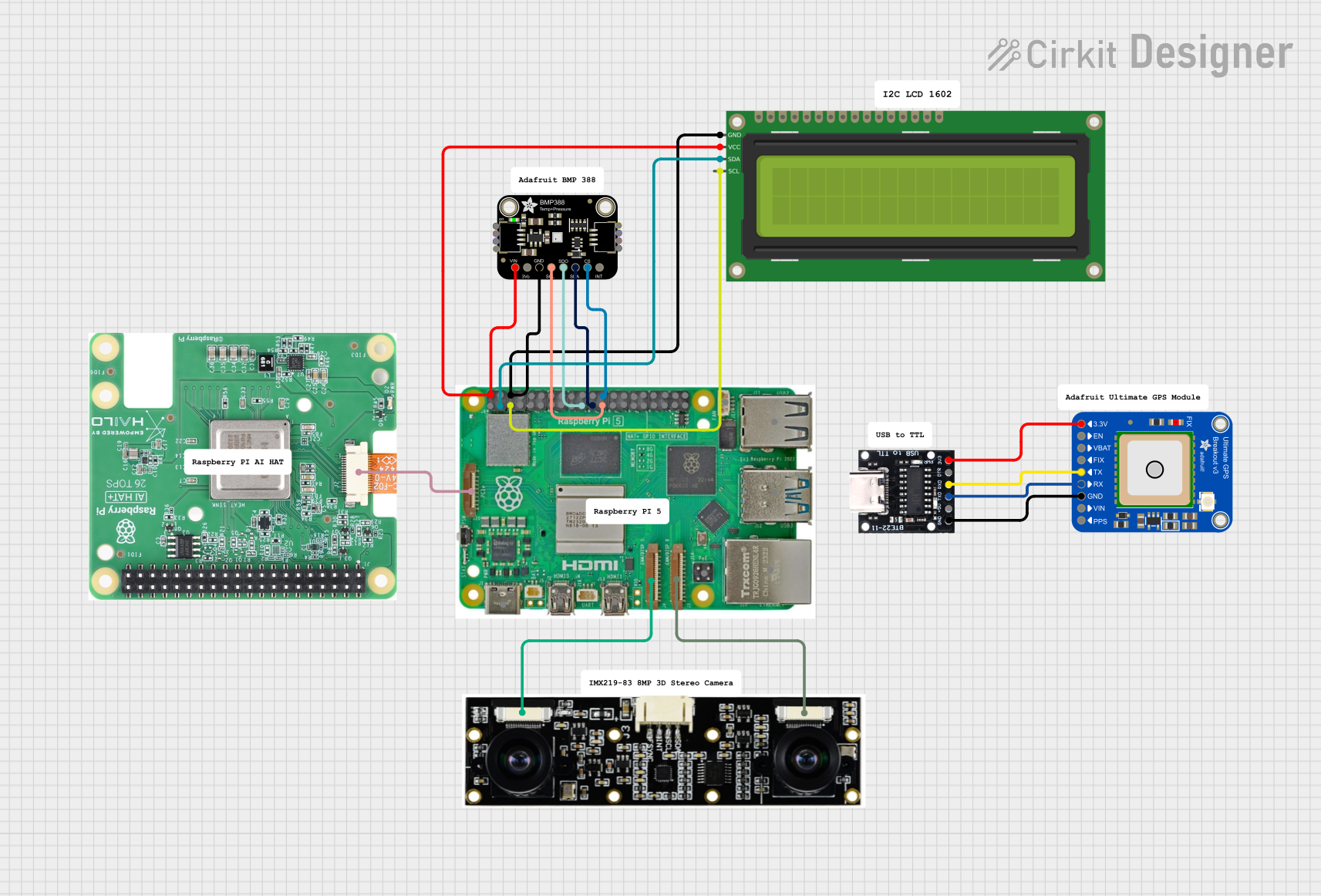
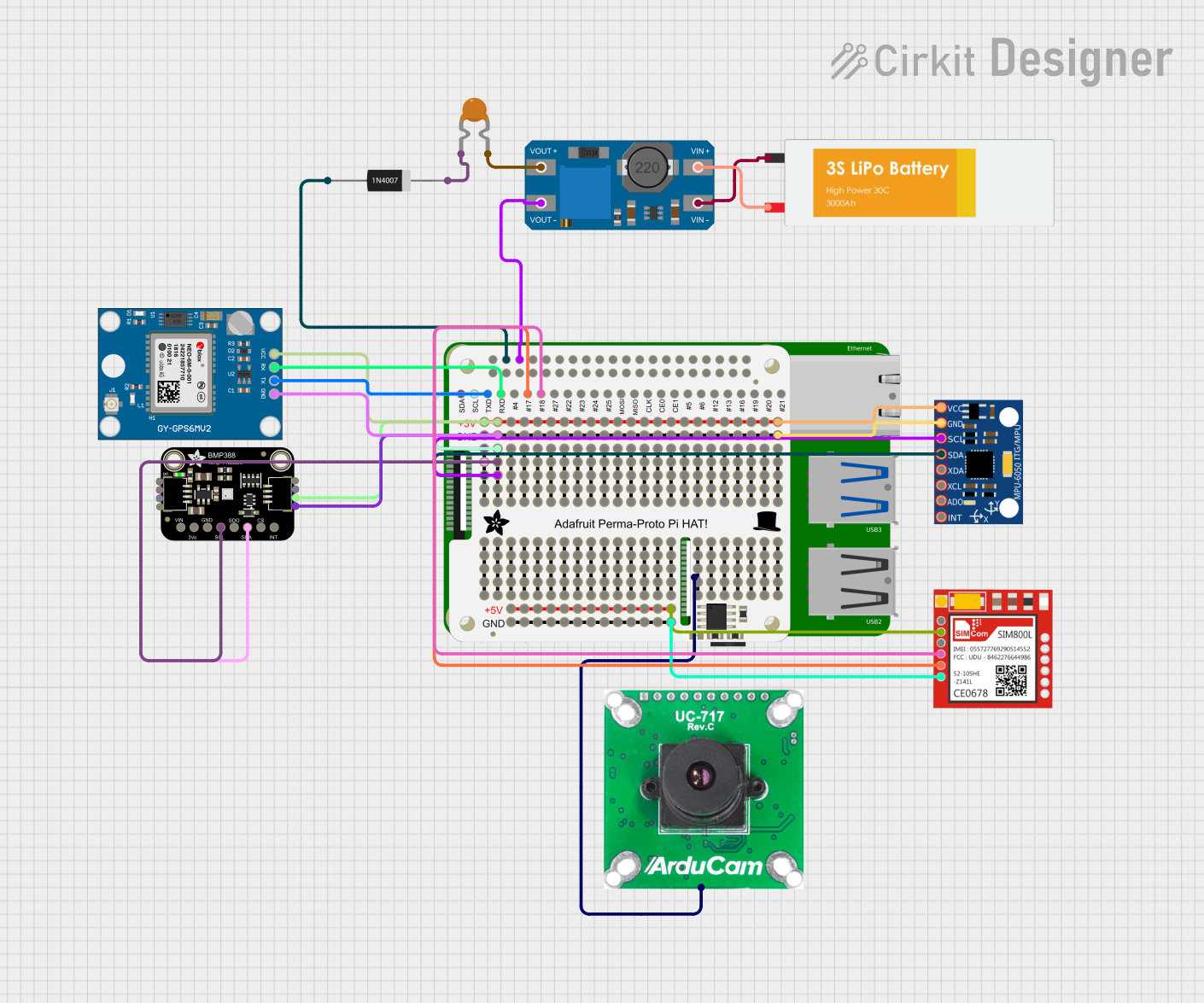
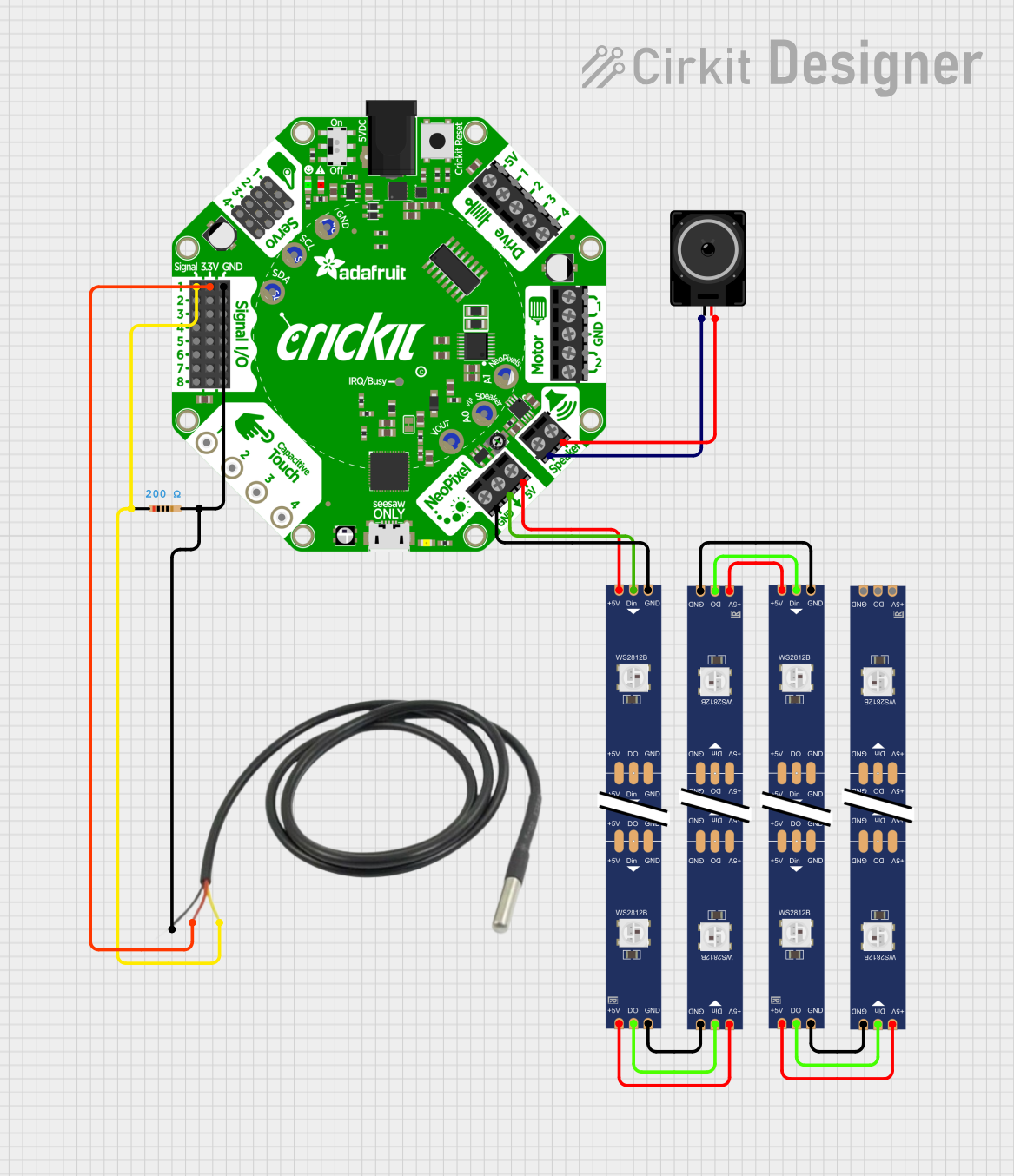
Explore Projects Built with Adafruit Crickit HAT for Raspberry Pi
Common Applications and Use Cases
- Educational robotics projects
- DIY home automation systems
- Interactive art installations
- Prototyping for industrial automation
- Custom remote-controlled vehicles or drones
Technical Specifications
Key Technical Details
- Operating Voltage: 5V (supplied by the Raspberry Pi)
- Logic Voltage: 3.3V (compatible with Raspberry Pi logic)
- Output Channels: Multiple, including 4 x Analog/Digital Servo outputs, 2 x Bi-directional DC motor controllers, 1 x Stepper motor controller, and additional GPIOs
- Communication Interface: I2C
- Dimensions: HAT standard size for Raspberry Pi
Pin Configuration and Descriptions
| Pin Number | Function | Description |
|---|---|---|
| 1 | 3V3 | 3.3V power supply |
| 2 | 5V | 5V power supply from Raspberry Pi |
| 3 | SDA | I2C Data line for communication with Raspberry Pi |
| 4 | 5V | 5V power supply |
| 5 | SCL | I2C Clock line for communication with Raspberry Pi |
| 6 | GND | Ground |
| ... | ... | ... |
| 40 | GPIO21 | General Purpose Input/Output (used for additional I/O) |
Note: This table only includes a subset of the pins for brevity.
Usage Instructions
How to Use the Component in a Circuit
- Mounting the HAT: Secure the Crickit HAT onto the GPIO header of the Raspberry Pi ensuring proper alignment of the pins.
- Power Supply: Connect a 5V power supply to the Raspberry Pi, which will also power the Crickit HAT.
- Connecting Actuators: Attach servos, DC motors, or stepper motors to the respective output channels on the Crickit HAT.
- Programming: Use the Adafruit CircuitPython library or the Python library to control the Crickit HAT from your Raspberry Pi.
Important Considerations and Best Practices
- Ensure that the power supply is sufficient for both the Raspberry Pi and the attached actuators.
- Always disconnect the power before making or altering connections to prevent damage.
- Use external power sources for high-current actuators to avoid overloading the Raspberry Pi's power supply.
- Check the compatibility of the actuators with the output channels' specifications.
Troubleshooting and FAQs
Common Issues
- Motors not responding: Ensure that the motors are properly connected and that the power supply is adequate.
- Communication errors: Check the I2C connections and ensure that the Raspberry Pi is configured to enable I2C communication.
Solutions and Tips for Troubleshooting
- Verify all connections and wiring.
- Check the Raspberry Pi's I2C configuration using
raspi-config. - Use the
i2cdetectcommand to confirm that the Raspberry Pi recognizes the Crickit HAT. - Ensure that the Adafruit libraries are correctly installed and up-to-date.
FAQs
Q: Can I power the Crickit HAT separately from the Raspberry Pi? A: Yes, you can use an external power source for the Crickit HAT, but ensure it is within the recommended voltage range.
Q: How many motors can I control with the Crickit HAT? A: The Crickit HAT can control up to 4 servos, 2 DC motors, and 1 stepper motor simultaneously.
Q: Is the Crickit HAT stackable? A: No, the Crickit HAT is not designed to be stackable due to the high current requirements of motors and actuators.
Example Code for Raspberry Pi
Below is an example Python script to control a servo motor connected to the Crickit HAT using an Arduino UNO:
import time
from adafruit_crickit import crickit
Create a servo object
servo = crickit.servo_1
Sweep the servo motor between 0 and 180 degrees
while True: for angle in range(0, 180, 5): # Move in 5 degree increments servo.angle = angle time.sleep(0.05) for angle in range(180, 0, -5): # Move back in 5 degree increments servo.angle = angle time.sleep(0.05)
Remember to install the `adafruit-crickit` library before running the script. This can be done using the following command:
```shell
pip3 install adafruit-crickit
Ensure that the servo is connected to the correct servo port on the Crickit HAT and that the Raspberry Pi has the I2C interface enabled.