How to Use Adafruit BNO055 STEMMA QT: Examples, Pinouts, and Specs
Introduction
The Adafruit BNO055 STEMMA QT is a sophisticated sensor module that integrates three key sensors: an accelerometer, a gyroscope, and a magnetometer. This 9-DOF (degree of freedom) sensor is capable of providing precise orientation and motion tracking, making it an ideal choice for a wide range of applications, including robotics, navigation, human-machine interface, and gaming. Its ease of use and advanced features are well-suited for hobbyists, educators, and professionals alike.
Explore Projects Built with Adafruit BNO055 STEMMA QT
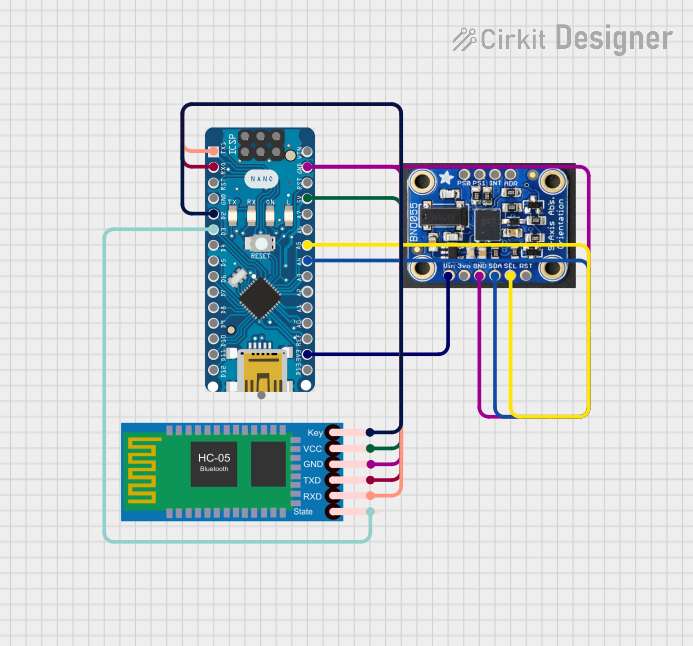
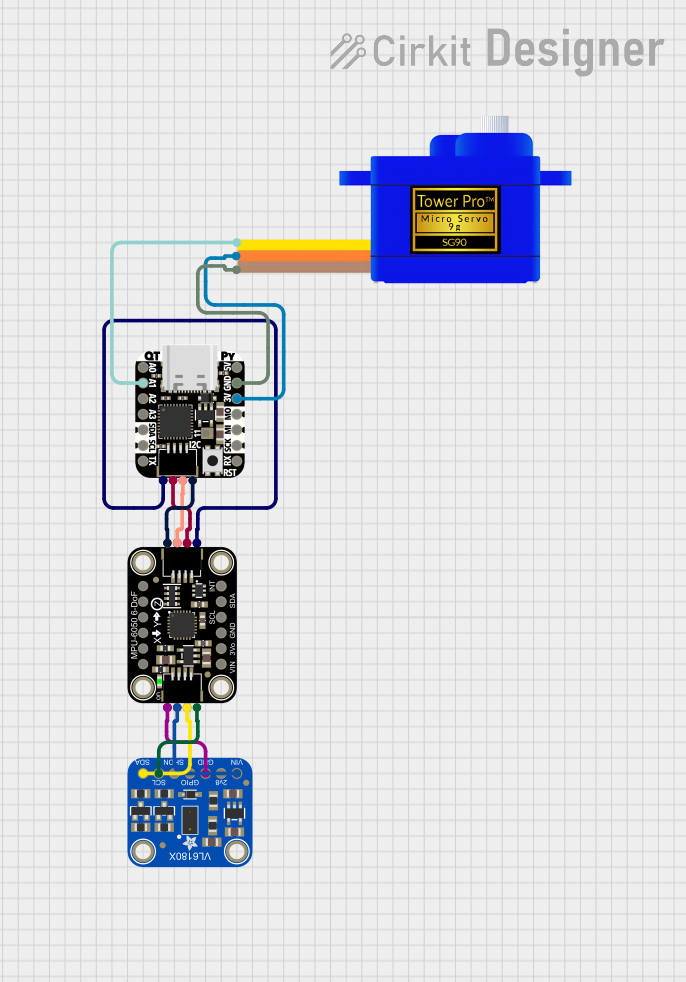
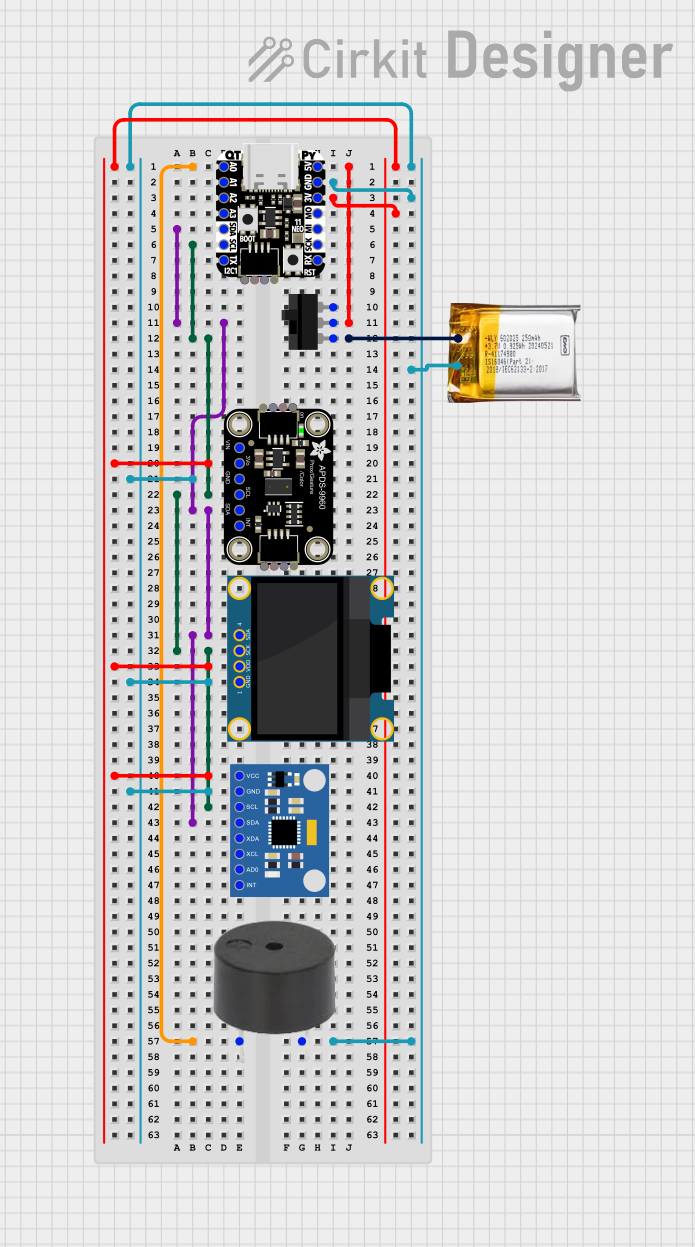
Explore Projects Built with Adafruit BNO055 STEMMA QT
Common Applications and Use Cases
- Inertial Measurement Unit (IMU) for robotics
- Orientation tracking for virtual reality (VR) and augmented reality (AR)
- Motion detection for gaming controllers
- Navigation systems for drones and unmanned vehicles
- Fitness and health monitoring devices
Technical Specifications
Key Technical Details
- Operating Voltage: 3.3V to 5V
- Interface: I2C (up to 400kHz) and UART
- Operating Temperature Range: -40°C to +85°C
- Output Data Rate: Configurable from 1Hz to 100Hz
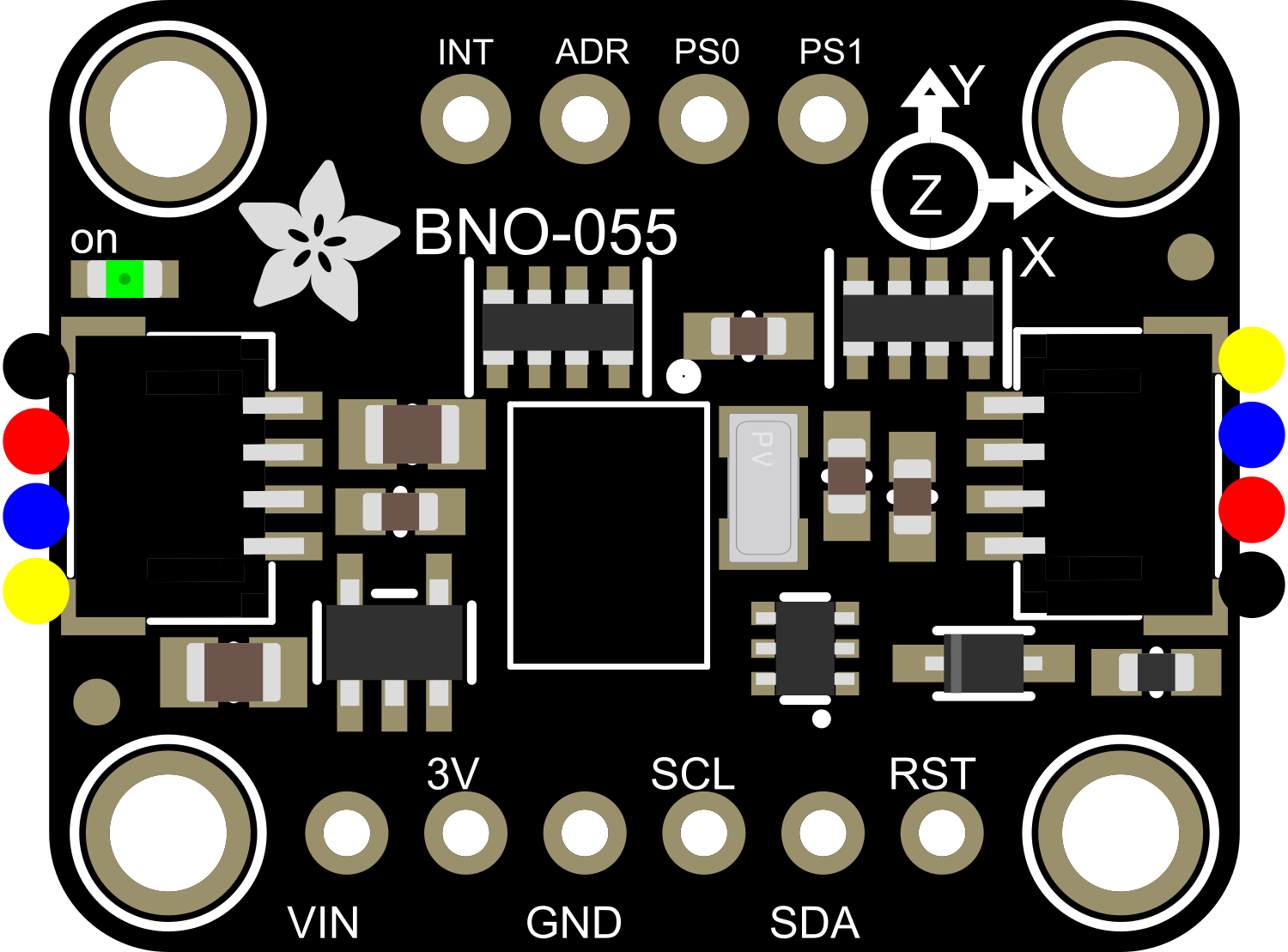
Pin Configuration and Descriptions
| Pin Number | Name | Description |
|---|---|---|
| 1 | VIN | Power supply (3.3V to 5V) |
| 2 | GND | Ground connection |
| 3 | SCL | I2C clock line |
| 4 | SDA | I2C data line |
| 5 | PS0 | Protocol select (pull to GND for I2C) |
| 6 | PS1 | Not connected (NC) |
| 7 | RST | Reset input (active low) |
| 8 | INT | Interrupt output (active low) |
Usage Instructions
How to Use the Component in a Circuit
- Powering the Sensor: Connect the VIN pin to a 3.3V or 5V power supply, and the GND pin to the ground.
- I2C Communication: Connect the SCL and SDA pins to the I2C clock and data lines on your microcontroller. Ensure pull-up resistors are in place if not provided by the microcontroller board.
- Reset and Interrupts: Optionally, connect the RST pin to a digital output on your microcontroller to control the reset function, and the INT pin to an interrupt-capable digital input to handle interrupts from the sensor.
- Protocol Selection: For I2C communication, ensure the PS0 pin is connected to GND.
Important Considerations and Best Practices
- Always ensure that the power supply voltage is within the specified range to prevent damage to the sensor.
- Use proper decoupling capacitors close to the sensor's power supply pin to minimize power supply noise.
- When using I2C, be aware of the bus speed limitations and address conflicts with other I2C devices.
- For optimal performance, calibrate the magnetometer in the application's environment to account for any magnetic distortions.
Example Code for Arduino UNO
#include <Wire.h>
#include <Adafruit_Sensor.h>
#include <Adafruit_BNO055.h>
// Check the I2C address in the datasheet and update if necessary
#define BNO055_ADDRESS (0x28)
Adafruit_BNO055 bno = Adafruit_BNO055(55, BNO055_ADDRESS);
void setup() {
Serial.begin(9600);
if (!bno.begin()) {
// There was a problem detecting the BNO055, check connections
Serial.println("No BNO055 detected. Check wiring!");
while (1);
}
delay(1000);
bno.setExtCrystalUse(true);
}
void loop() {
// Get a new sensor event
sensors_event_t event;
bno.getEvent(&event);
// Display the orientation data
Serial.print("Orientation: ");
Serial.print("X: ");
Serial.print(event.orientation.x, 4);
Serial.print(" Y: ");
Serial.print(event.orientation.y, 4);
Serial.print(" Z: ");
Serial.print(event.orientation.z, 4);
Serial.println("");
delay(100); // Adjust to the desired output data rate
}
Troubleshooting and FAQs
Common Issues Users Might Face
- Sensor Not Detected: Ensure that the wiring is correct, and the power supply is within the specified range. Check the I2C address used in the code matches the sensor's address.
- Inaccurate Readings: Perform sensor calibration, especially for the magnetometer, to improve accuracy. Ensure the sensor is placed away from magnetic fields and metals that can distort readings.
- Intermittent Communication: Check for loose connections and ensure that the I2C bus is not overloaded with too many devices or long cable runs.
Solutions and Tips for Troubleshooting
- Power Cycling: Sometimes simply resetting the power to the sensor can resolve communication issues.
- I2C Pull-up Resistors: Verify that appropriate pull-up resistors are in place for the I2C lines, typically 4.7kΩ to 10kΩ.
- Code Debugging: Use serial print statements to debug and verify that the microcontroller is running the code correctly and communicating with the sensor.
FAQs
Q: Can the BNO055 be used with a 5V microcontroller like the Arduino UNO? A: Yes, the BNO055 STEMMA QT can be interfaced with a 5V microcontroller as it is 5V tolerant on the I2C pins.
Q: How do I calibrate the BNO055? A: Calibration involves moving the sensor in specific patterns. Adafruit provides a calibration guide and example code to assist with this process.
Q: What is the purpose of the INT pin? A: The INT pin can be used to receive interrupt signals from the BNO055, such as when new sensor data is available or when certain motion thresholds are exceeded.
Q: How can I change the output data rate? A: The output data rate can be configured using the BNO055's internal registers. Adafruit's BNO055 library provides functions to adjust these settings easily.
For further assistance, consult the Adafruit BNO055 STEMMA QT datasheet and the Adafruit support forums.