How to Use Shield Cytron MD-10: Examples, Pinouts, and Specs

Introduction
The Cytron MD-10 Motor Driver Shield is a robust and versatile motor driver designed specifically for Arduino. It is capable of driving a single brushed DC motor with a continuous current of 10A and a peak current of 30A. This shield is ideal for applications requiring high current and precise motor control, such as robotics, automation systems, and electric vehicles.
Explore Projects Built with Shield Cytron MD-10


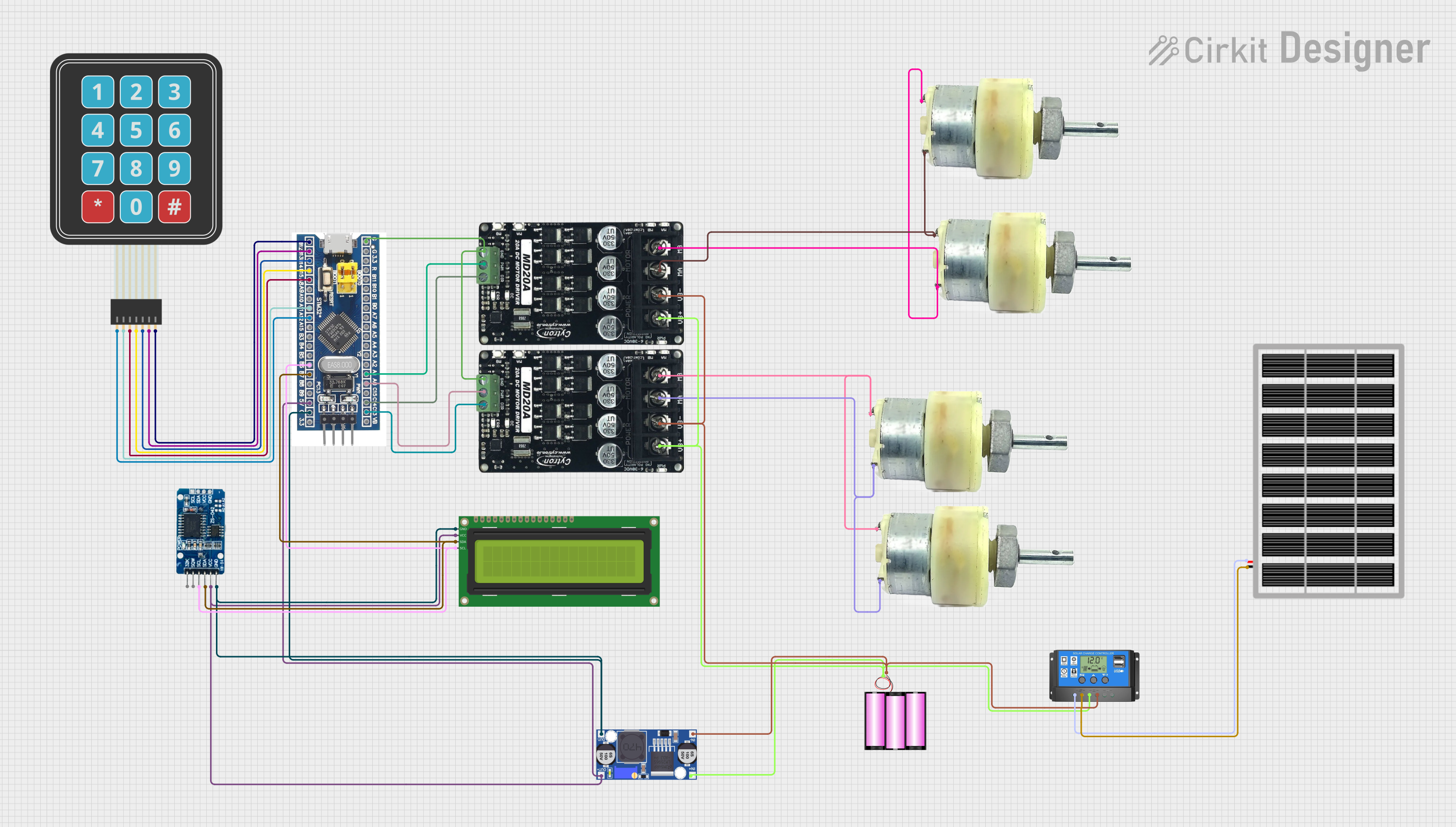
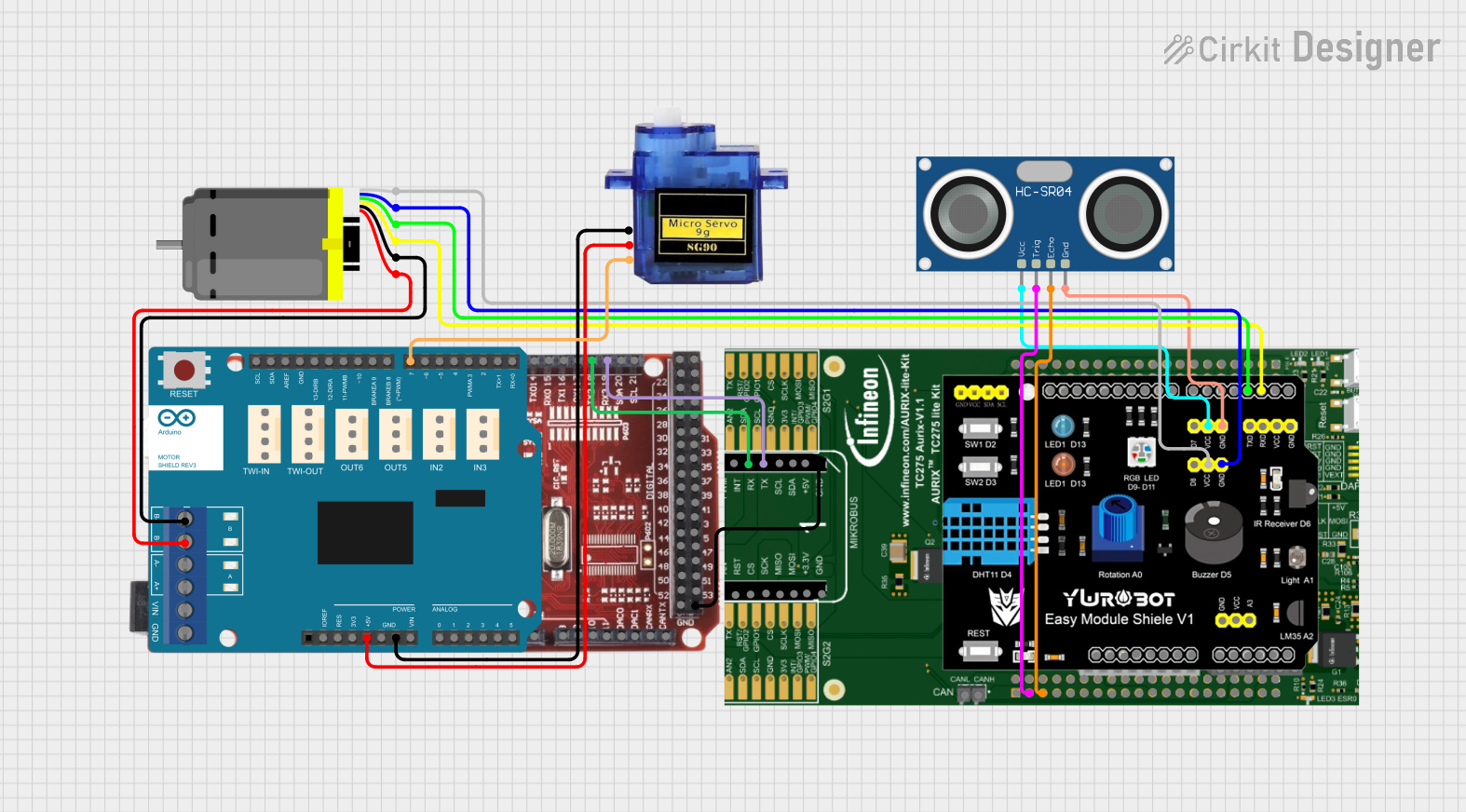
Explore Projects Built with Shield Cytron MD-10
Technical Specifications
Key Technical Details
| Parameter | Value |
|---|---|
| Operating Voltage | 7V to 30V |
| Continuous Current | 10A |
| Peak Current | 30A |
| Control Interface | PWM, Direction |
| PWM Frequency | Up to 20kHz |
| Dimensions | 68mm x 53mm x 18mm |
| Weight | 30g |
Pin Configuration and Descriptions
| Pin Name | Arduino Pin | Description |
|---|---|---|
| DIR | D7 | Direction control input |
| PWM | D6 | PWM speed control input |
| GND | GND | Ground |
| VIN | VIN | Motor power supply (7V to 30V) |
| M+ | - | Motor positive terminal |
| M- | - | Motor negative terminal |
Usage Instructions
How to Use the Component in a Circuit
Mount the Shield: Place the Cytron MD-10 Motor Driver Shield on top of the Arduino UNO, ensuring that all pins are correctly aligned and inserted.
Connect the Motor: Connect the positive terminal of the brushed DC motor to the M+ terminal on the shield and the negative terminal to the M- terminal.
Power Supply: Connect an appropriate power supply (7V to 30V) to the VIN and GND terminals on the shield.
Arduino Code: Upload the following sample code to the Arduino UNO to control the motor.
// Cytron MD-10 Motor Driver Shield Example Code
// This code controls the speed and direction of a DC motor using PWM and DIR pins.
const int dirPin = 7; // Direction control pin
const int pwmPin = 6; // PWM speed control pin
void setup() {
pinMode(dirPin, OUTPUT); // Set direction pin as output
pinMode(pwmPin, OUTPUT); // Set PWM pin as output
}
void loop() {
// Rotate motor in one direction at full speed
digitalWrite(dirPin, HIGH); // Set direction to forward
analogWrite(pwmPin, 255); // Set speed to maximum (255)
delay(2000); // Run for 2 seconds
// Rotate motor in the opposite direction at half speed
digitalWrite(dirPin, LOW); // Set direction to reverse
analogWrite(pwmPin, 128); // Set speed to half (128)
delay(2000); // Run for 2 seconds
}
Important Considerations and Best Practices
- Heat Dissipation: Ensure adequate ventilation or cooling for the shield, especially when operating at high currents.
- Power Supply: Use a stable and sufficient power supply to avoid voltage drops that could affect motor performance.
- Motor Specifications: Verify that the motor's voltage and current ratings are within the shield's capabilities to prevent damage.
Troubleshooting and FAQs
Common Issues Users Might Face
Motor Not Running:
- Solution: Check all connections, ensure the power supply is adequate, and verify that the Arduino code is correctly uploaded.
Motor Running in Only One Direction:
- Solution: Verify the DIR pin connection and ensure the direction control logic in the code is correct.
Overheating:
- Solution: Ensure proper ventilation and consider adding a heat sink or fan if necessary.
PWM Control Not Working:
- Solution: Check the PWM pin connection and ensure the PWM frequency is within the shield's specifications.
FAQs
Q: Can I use this shield with other Arduino boards?
- A: Yes, the Cytron MD-10 Motor Driver Shield is compatible with other Arduino boards that have the same pin configuration.
Q: What type of motors can I drive with this shield?
- A: This shield is designed for brushed DC motors.
Q: Can I control the motor speed and direction simultaneously?
- A: Yes, you can control both speed and direction using the PWM and DIR pins.
By following this documentation, users can effectively utilize the Cytron MD-10 Motor Driver Shield in their projects, ensuring reliable and efficient motor control.