How to Use Adafruit L3GD20H Triple-Axis Gyro Breakout Board: Examples, Pinouts, and Specs
Introduction
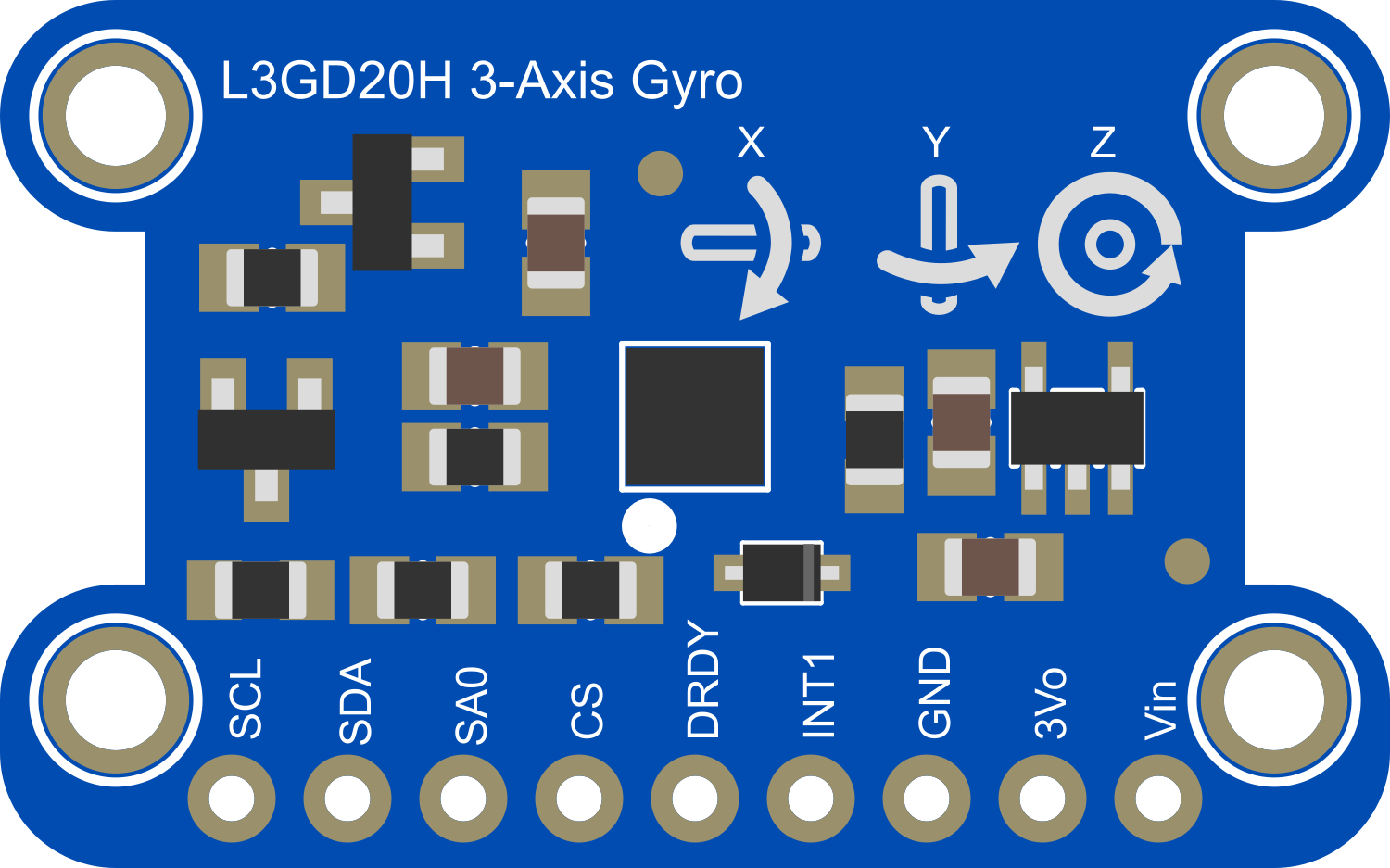
The Adafruit L3GD20H Triple-Axis Gyro Breakout Board is a compact and versatile sensor designed to measure angular velocity along three perpendicular axes: pitch, roll, and yaw. This makes it an ideal component for applications in robotics, motion sensing, and stabilization systems. The board features the L3GD20H gyroscope chip, which provides high-resolution measurements and is capable of detecting rates with a high degree of accuracy.
Explore Projects Built with Adafruit L3GD20H Triple-Axis Gyro Breakout Board
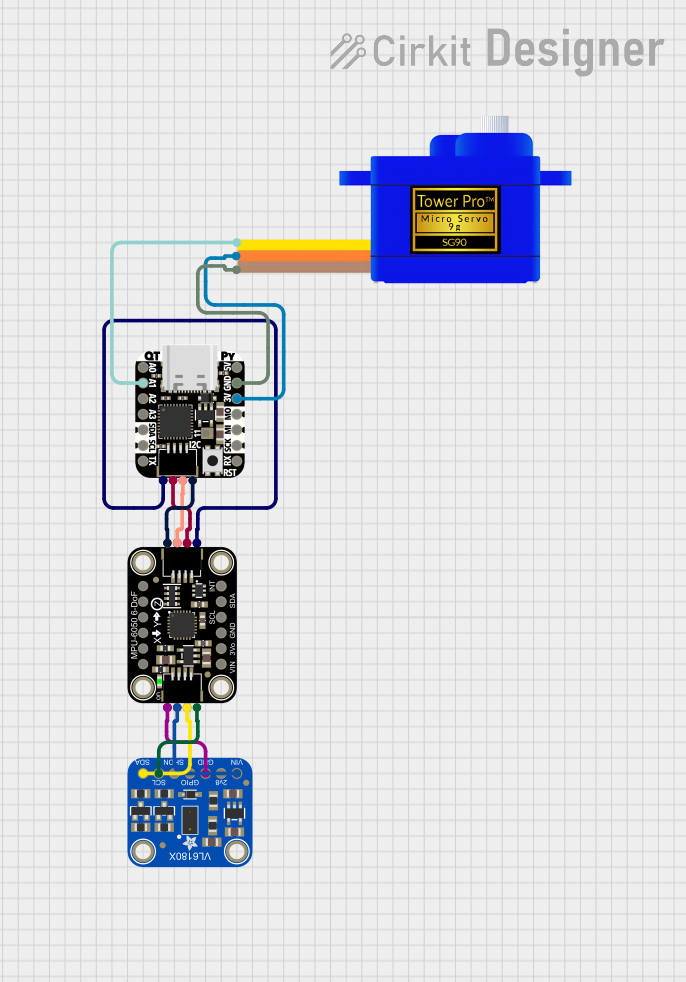
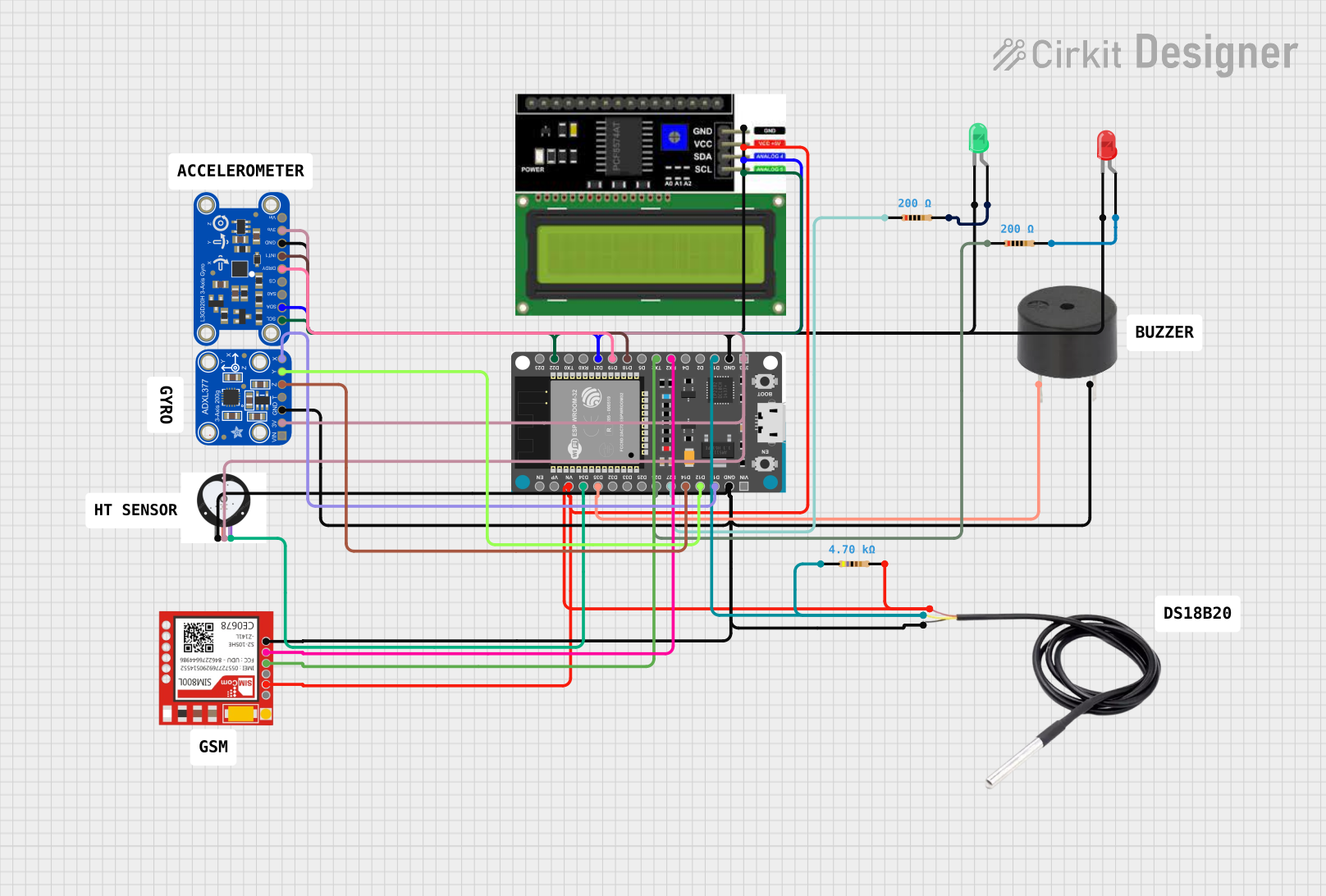
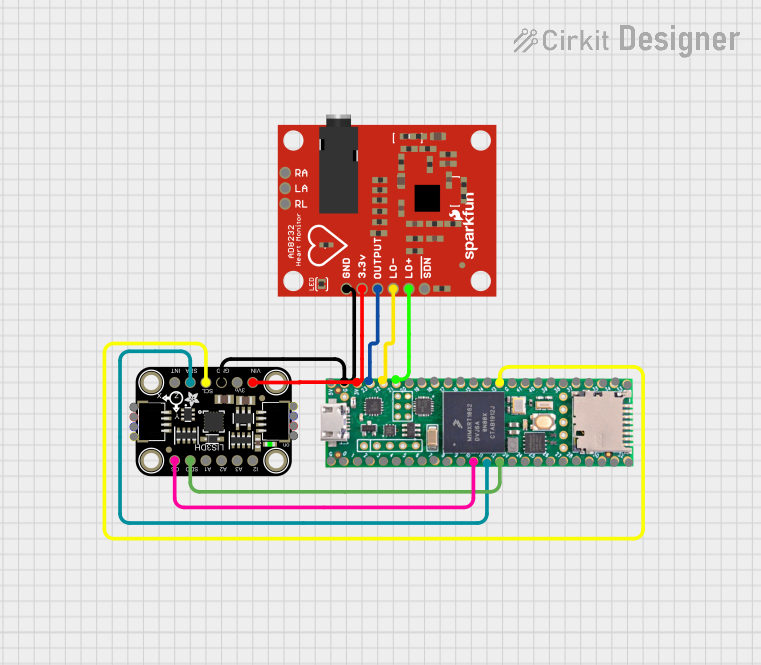
Explore Projects Built with Adafruit L3GD20H Triple-Axis Gyro Breakout Board
Common Applications and Use Cases
- Inertial Measurement Units (IMUs) for orientation tracking
- Motion control systems for robotics
- User input devices (e.g., game controllers, pointing devices)
- Vehicle navigation systems for dead reckoning
- Stabilization systems for drones and other RC vehicles
Technical Specifications
Key Technical Details
- Supply Voltage (VDD): 2.4V to 3.6V
- Output Data Rates (ODR): 12.5 Hz to 800 Hz
- Sensitivity: 245/500/2000 dps (degrees per second)
- Communication Interface: I2C/SPI
- Operating Temperature Range: -40°C to +85°C
Pin Configuration and Descriptions
| Pin Number | Name | Description |
|---|---|---|
| 1 | VIN | Supply voltage (2.4V to 3.6V) |
| 2 | GND | Ground connection |
| 3 | SCL | I2C clock line |
| 4 | SDA | I2C data line |
| 5 | SA0 | I2C address selection pin |
| 6 | CS | Chip select for SPI (active low) |
| 7 | SDO | SPI data output (MISO) |
| 8 | SDA/SPI | SPI data input (MOSI) |
| 9 | SCL/SPC | SPI clock |
Usage Instructions
How to Use the Component in a Circuit
Powering the Board:
- Connect the VIN pin to a 2.4V to 3.6V power supply.
- Connect the GND pin to the ground of your power supply.
I2C Communication:
- Connect the SCL pin to the I2C clock line of your microcontroller.
- Connect the SDA pin to the I2C data line of your microcontroller.
- If using multiple I2C devices, ensure each device has a unique address by setting the SA0 pin accordingly.
SPI Communication (Optional):
- Connect the SCL/SPC to the SPI clock line of your microcontroller.
- Connect the SDA/SPI to the SPI MOSI line of your microcontroller.
- Connect the SDO to the SPI MISO line of your microcontroller.
- Control the CS pin to enable and disable the device on the SPI bus.
Important Considerations and Best Practices
- Ensure that the power supply is within the specified voltage range to prevent damage.
- Use pull-up resistors on the I2C lines if they are not provided by the microcontroller.
- When using SPI, ensure that the CS pin is only active for the L3GD20H to avoid bus contention.
- Place the gyro in a location with minimal vibration and temperature fluctuations for best performance.
Example Code for Arduino UNO
#include <Wire.h>
#include <Adafruit_Sensor.h>
#include <Adafruit_L3GD20_U.h>
Adafruit_L3GD20_Unified gyro = Adafruit_L3GD20_Unified(20);
void setup(void) {
Serial.begin(9600);
Serial.println("Gyroscope Test"); Serial.println("");
/* Initialize the sensor */
if(!gyro.begin())
{
/* There was a problem detecting the L3GD20 ... check your connections */
Serial.println("Ooops, no L3GD20 detected ... Check your wiring!");
while(1);
}
}
void loop(void) {
/* Get a new sensor event */
sensors_event_t event;
gyro.getEvent(&event);
/* Display the results (angular velocity is measured in degrees per second) */
Serial.print("X: "); Serial.print(event.gyro.x); Serial.print(" ");
Serial.print("Y: "); Serial.print(event.gyro.y); Serial.print(" ");
Serial.print("Z: "); Serial.print(event.gyro.z); Serial.print(" ");
Serial.println("deg/s");
/* Delay a bit to keep serial output from being too crazy */
delay(500);
}
This example initializes the L3GD20H sensor and continuously reads the angular velocity in degrees per second from the X, Y, and Z axes, outputting the results to the serial monitor.
Troubleshooting and FAQs
Common Issues Users Might Face
- Sensor not detected: Ensure that the wiring is correct and that the power supply is within the specified range.
- Inaccurate readings: Verify that the sensor is placed in a stable environment and recalibrate if necessary.
- I2C/SPI communication failure: Check the pull-up resistors on the I2C lines or the CS line control for SPI.
Solutions and Tips for Troubleshooting
- Double-check all connections and solder joints.
- Use the I2C scanner sketch to confirm the device address.
- Ensure that the microcontroller libraries are up to date.
- Consult the Adafruit L3GD20H datasheet for detailed operational characteristics.
FAQs
Q: Can the L3GD20H be used with a 5V microcontroller? A: Yes, but ensure that the VIN pin is connected to a 3.3V supply, and use logic level converters for I2C/SPI lines if necessary.
Q: How can I change the sensitivity of the sensor? A: The sensitivity can be adjusted through software using the provided library functions.
Q: What is the default I2C address of the L3GD20H? A: The default I2C address is 0x6B when SA0 is high and 0x6A when SA0 is low.
Q: How do I calibrate the gyroscope? A: Calibration involves taking multiple readings at a known stationary state and averaging them to determine an offset. This offset is then subtracted from subsequent readings.