How to Use Servo : Examples, Pinouts, and Specs
Introduction
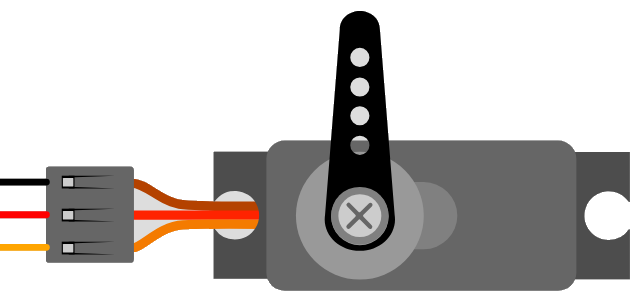
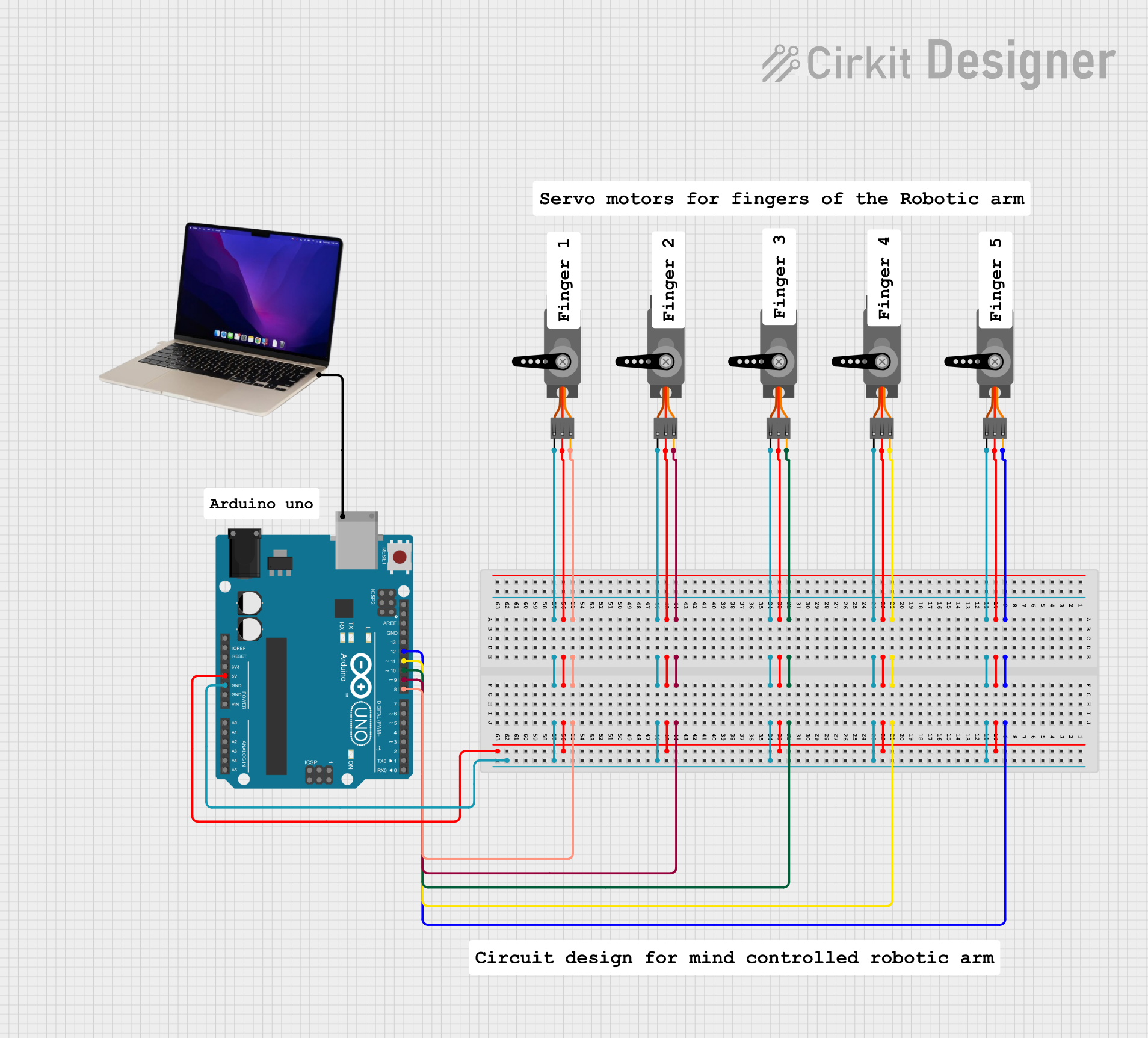
A servo motor is a rotary actuator or linear actuator that allows for precise control of angular or linear position, velocity, and acceleration. It consists of a suitable motor coupled to a sensor for position feedback. Servo motors are widely used in robotics, radio-controlled cars, airplanes, and boats, as well as in industrial applications, such as controlling the motion of robotic arms. The control signal is a digital PWM (Pulse Width Modulation) signal, which determines the position of the shaft of the servo motor.
Explore Projects Built with Servo
Explore Projects Built with Servo
Technical Specifications
Key Technical Details
- Voltage Range: Typically 4.8V to 6V for standard servos.
- Current Consumption: Varies with load, typically up to 1A at peak for standard servos.
- Torque: Depends on the model, can range from 1.5 kg-cm to 20 kg-cm or more.
- Speed: Varies by model, with typical speeds from 0.10 to 0.20 seconds per 60-degree movement.
- Rotation Angle: Usually 0 to 180 degrees, some servos offer more extended ranges.
- Control Signal: PWM, typically a 1-2 ms pulse every 20 ms corresponds to 0-180 degrees.
Pin Configuration and Descriptions
| Pin Name | Description |
|---|---|
| VCC | Power supply (4.8V to 6V) |
| GND | Ground connection |
| SIGNAL | PWM control signal input |
Usage Instructions
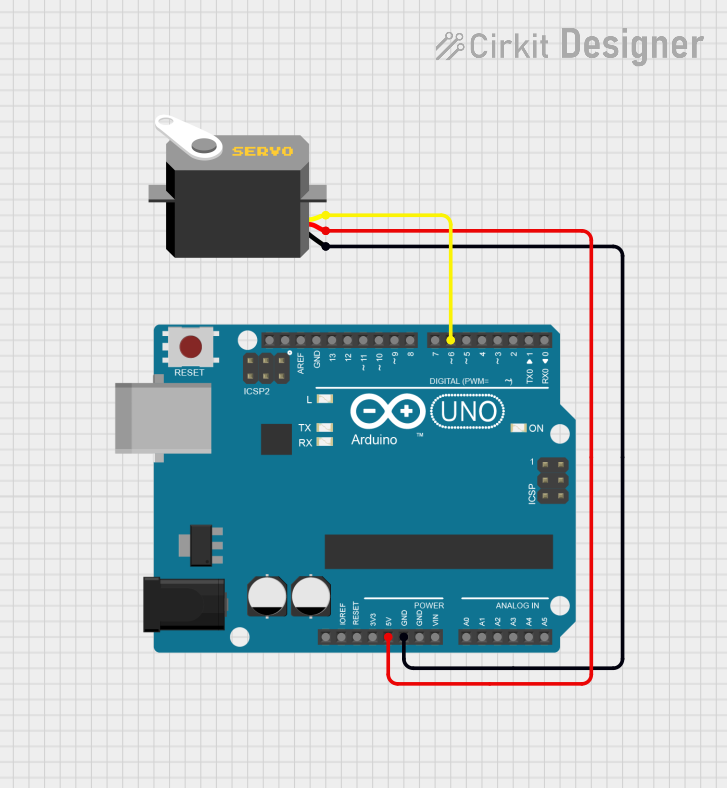
Connecting to a Circuit
- Connect the VCC pin to a suitable power supply (4.8V to 6V).
- Connect the GND pin to the ground of the power supply.
- Connect the SIGNAL pin to a PWM-capable pin on your microcontroller, such as an Arduino UNO.
Important Considerations and Best Practices
- Ensure that the power supply can handle the current requirements of the servo.
- Avoid stalling the servo as it can lead to high current draw and potential damage.
- Use a separate power supply if the servo's current draw is too high for the microcontroller's voltage regulator.
- Keep the control signal within the specified pulse width range to prevent damage to the servo.
Example Code for Arduino UNO
#include <Servo.h>
Servo myservo; // create servo object to control a servo
void setup() {
myservo.attach(9); // attaches the servo on pin 9 to the servo object
}
void loop() {
myservo.write(90); // sets the servo position to 90 degrees
delay(1000); // waits for the servo to reach the position
myservo.write(0); // sets the servo position to 0 degrees
delay(1000); // waits for the servo to reach the position
}
Troubleshooting and FAQs
Common Issues
- Servo not moving: Check the power supply and connections. Ensure the control signal is being sent correctly.
- Erratic movement: This can be caused by an inadequate power supply or noise in the control signal. Ensure a stable power source and signal.
- Overheating: Continuous operation under load or stalling can cause overheating. Allow the servo to cool down.
Solutions and Tips
- Use a multimeter to check for proper voltage at the servo's power pins.
- If using long wires, consider using a twisted pair for the signal and ground to reduce noise.
- For high-power servos, use a dedicated power supply and ensure all connections are secure.
FAQs
Q: Can I control a servo with a 3.3V microcontroller like an Arduino Due? A: Yes, but ensure that the servo can handle the 3.3V control signal. Some servos require a 5V signal.
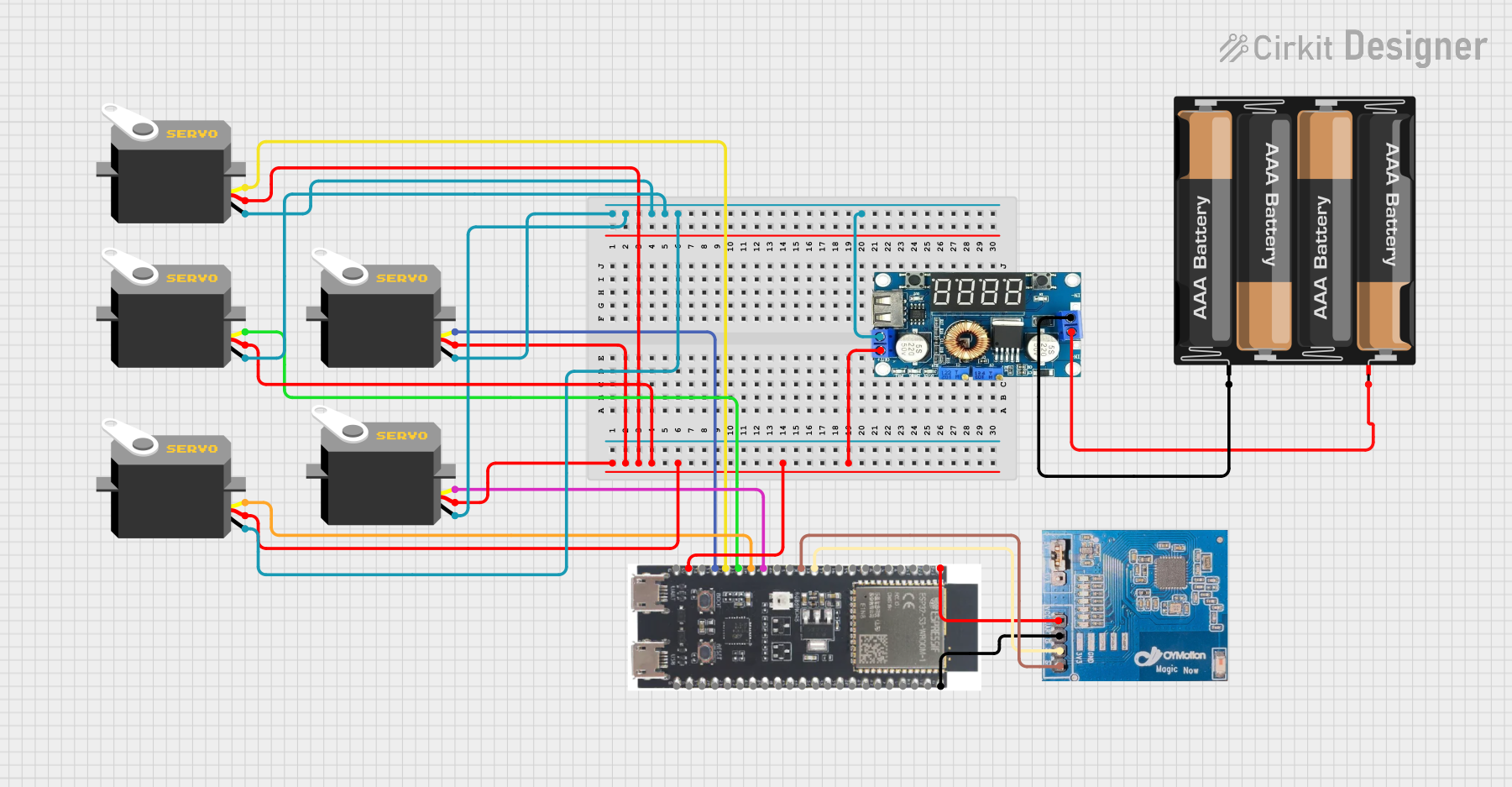
Q: How can I control a servo with a higher voltage or current rating? A: Use an external power supply that matches the servo's requirements, and connect the ground of the power supply to the ground of the microcontroller.
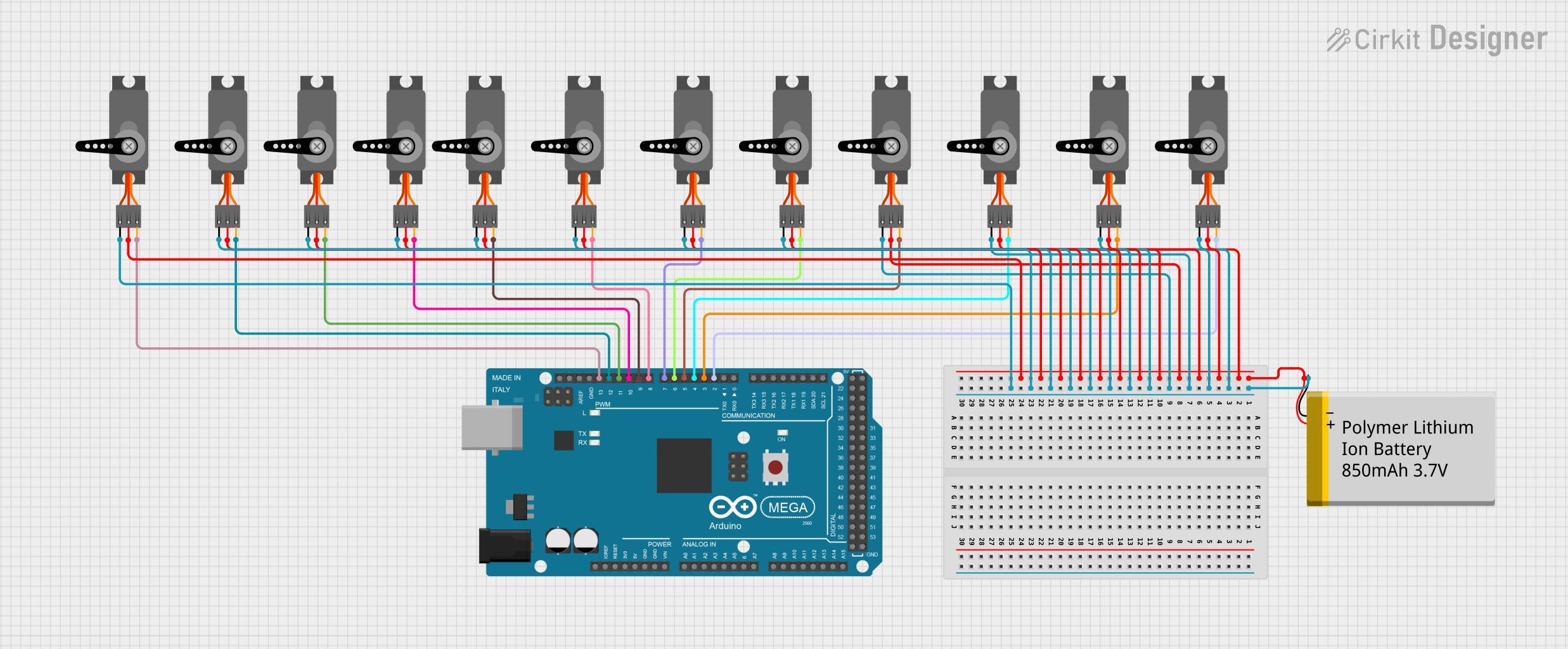
Q: Can I control more than one servo with an Arduino? A: Yes, you can control multiple servos by using multiple PWM-capable pins and creating a Servo object for each one in your code.