How to Use BLS 35A Mini V2 4-in-1 ESC: Examples, Pinouts, and Specs
Introduction
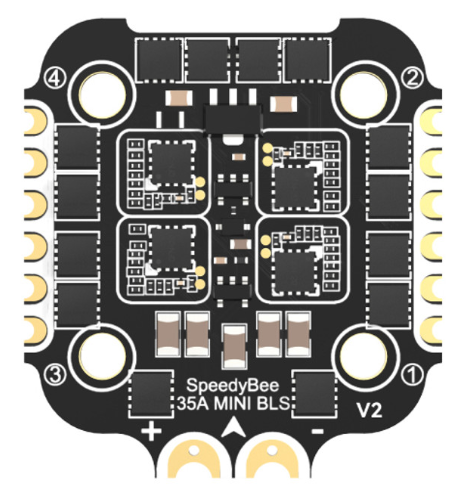
The BLS 35A Mini V2 4-in-1 ESC by SpeedyBee (Part ID: ESC) is a compact and efficient electronic speed controller designed specifically for multirotor drones. This component integrates four ESCs into a single unit, significantly simplifying wiring, reducing weight, and improving overall build efficiency. It is capable of handling up to 35A of continuous current per channel, making it suitable for high-performance drone applications. The ESC supports smooth motor control, a wide range of motor types, and advanced protocols for enhanced responsiveness.
Explore Projects Built with BLS 35A Mini V2 4-in-1 ESC


Explore Projects Built with BLS 35A Mini V2 4-in-1 ESC
Common Applications and Use Cases
- Multirotor drones (e.g., quadcopters, hexacopters)
- FPV (First-Person View) racing drones
- Aerial photography and videography platforms
- Lightweight and compact drone builds
- Hobbyist and professional drone projects
Technical Specifications
The following table outlines the key technical details of the BLS 35A Mini V2 4-in-1 ESC:
| Parameter | Specification |
|---|---|
| Continuous Current | 35A per channel |
| Burst Current | 40A (10 seconds) |
| Input Voltage Range | 2S–6S LiPo (7.4V–25.2V) |
| Firmware | BLHeli_S |
| Protocol Support | DShot150, DShot300, DShot600, Multishot |
| Dimensions | 36mm x 36mm |
| Mounting Hole Spacing | 20mm x 20mm (M3 screws) |
| Weight | 10g |
| Motor Output Channels | 4 (4-in-1 design) |
| BEC Output | None |
| Operating Temperature | -20°C to 80°C |
Pin Configuration and Descriptions
The BLS 35A Mini V2 4-in-1 ESC features a compact pinout for easy integration into drone builds. Below is the pin configuration:
| Pin Name | Description |
|---|---|
| VBAT | Main power input (connect to LiPo battery positive) |
| GND | Ground connection (connect to LiPo battery negative) |
| M1 | Motor 1 output |
| M2 | Motor 2 output |
| M3 | Motor 3 output |
| M4 | Motor 4 output |
| Signal 1 | Signal input for Motor 1 |
| Signal 2 | Signal input for Motor 2 |
| Signal 3 | Signal input for Motor 3 |
| Signal 4 | Signal input for Motor 4 |
| Telemetry | Optional telemetry output (if supported) |
Usage Instructions
How to Use the Component in a Circuit
- Power Connection: Connect the VBAT pin to the positive terminal of your LiPo battery and the GND pin to the negative terminal.
- Motor Connections: Solder the motor wires to the corresponding motor output pads (M1, M2, M3, M4).
- Signal Connections: Connect the signal input pins (Signal 1–4) to the flight controller's motor output pins.
- Telemetry (Optional): If your flight controller supports telemetry, connect the telemetry pin to the appropriate input on the flight controller.
- Mounting: Secure the ESC to your drone frame using M3 screws and ensure proper insulation to avoid short circuits.
Important Considerations and Best Practices
- Cooling: Ensure adequate airflow over the ESC to prevent overheating during operation.
- Firmware Updates: Use BLHeli_S software to update the firmware and configure settings such as motor direction and protocol.
- Voltage Compatibility: Verify that your LiPo battery voltage is within the supported range (2S–6S).
- Signal Protocol: Configure your flight controller to use a compatible protocol (e.g., DShot600) for optimal performance.
- Soldering: Use high-quality solder and ensure clean, secure connections to avoid electrical issues.
Example Code for Arduino UNO (Simulating Signal Output)
While the BLS 35A Mini V2 4-in-1 ESC is typically controlled by a flight controller, you can simulate signal output using an Arduino UNO for testing purposes. Below is an example code snippet:
#include <Servo.h>
// Create servo objects for each motor
Servo motor1;
Servo motor2;
Servo motor3;
Servo motor4;
void setup() {
// Attach ESC signal pins to Arduino PWM pins
motor1.attach(9); // Motor 1 signal connected to pin 9
motor2.attach(10); // Motor 2 signal connected to pin 10
motor3.attach(11); // Motor 3 signal connected to pin 11
motor4.attach(6); // Motor 4 signal connected to pin 6
// Initialize ESCs with a low throttle signal
motor1.writeMicroseconds(1000); // Minimum throttle
motor2.writeMicroseconds(1000);
motor3.writeMicroseconds(1000);
motor4.writeMicroseconds(1000);
delay(5000); // Wait for ESCs to initialize
}
void loop() {
// Example: Gradually increase throttle
for (int throttle = 1000; throttle <= 2000; throttle += 10) {
motor1.writeMicroseconds(throttle);
motor2.writeMicroseconds(throttle);
motor3.writeMicroseconds(throttle);
motor4.writeMicroseconds(throttle);
delay(50); // Wait 50ms between throttle steps
}
delay(2000); // Hold maximum throttle for 2 seconds
// Gradually decrease throttle
for (int throttle = 2000; throttle >= 1000; throttle -= 10) {
motor1.writeMicroseconds(throttle);
motor2.writeMicroseconds(throttle);
motor3.writeMicroseconds(throttle);
motor4.writeMicroseconds(throttle);
delay(50);
}
delay(2000); // Hold minimum throttle for 2 seconds
}
Troubleshooting and FAQs
Common Issues and Solutions
ESC Not Powering On
- Cause: Incorrect power connection or insufficient battery voltage.
- Solution: Verify that the VBAT and GND pins are correctly connected to the battery and that the battery voltage is within the supported range (2S–6S).
Motors Not Spinning
- Cause: Signal wires not connected or incorrect protocol configuration.
- Solution: Check the signal connections between the ESC and flight controller. Ensure the flight controller is configured to use a compatible protocol (e.g., DShot600).
Overheating
- Cause: Insufficient cooling or excessive current draw.
- Solution: Ensure proper airflow over the ESC and verify that the motors and propellers are not overloading the ESC.
Motor Stuttering or Jittering
- Cause: Incorrect motor timing or damaged motor/ESC.
- Solution: Update the ESC firmware using BLHeli_S and check for physical damage to the motors or ESC.
FAQs
Q: Can I use this ESC with a 7S LiPo battery?
A: No, the ESC supports a maximum of 6S (25.2V). Using a 7S battery may damage the ESC.Q: Does this ESC have a built-in BEC?
A: No, the ESC does not include a BEC. You will need an external BEC or a flight controller with a built-in BEC to power other components.Q: How do I reverse motor direction?
A: Use the BLHeli_S software to configure the motor direction for each channel.Q: Is this ESC waterproof?
A: No, the ESC is not waterproof. Apply conformal coating if you plan to use it in wet conditions.