How to Use tcrt5000: Examples, Pinouts, and Specs
Introduction
The TCRT5000 is an infrared (IR) sensor module that integrates an IR emitter and a phototransistor in a single package. It is designed for object detection and proximity sensing by emitting IR light and detecting the reflected light from nearby objects. The sensor is highly sensitive to reflective surfaces and is commonly used in robotics, line-following robots, optical encoders, and other automation systems.
Explore Projects Built with tcrt5000
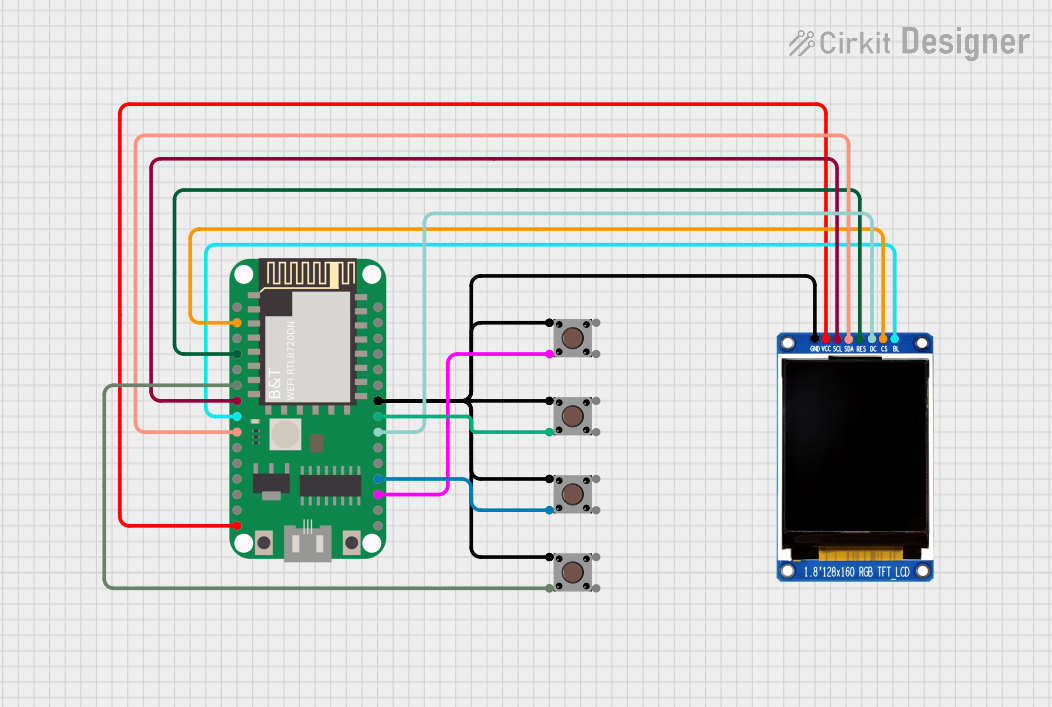
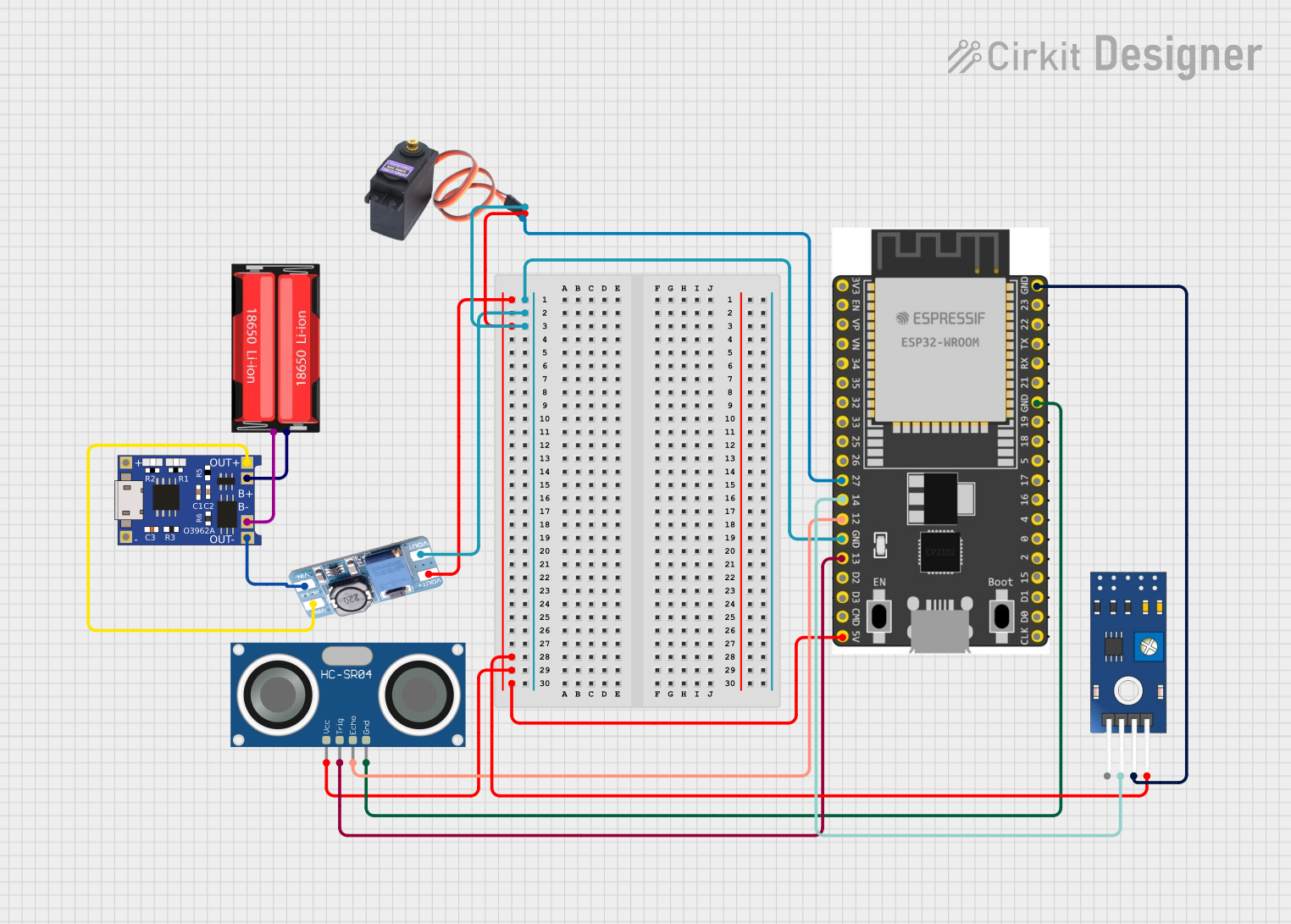
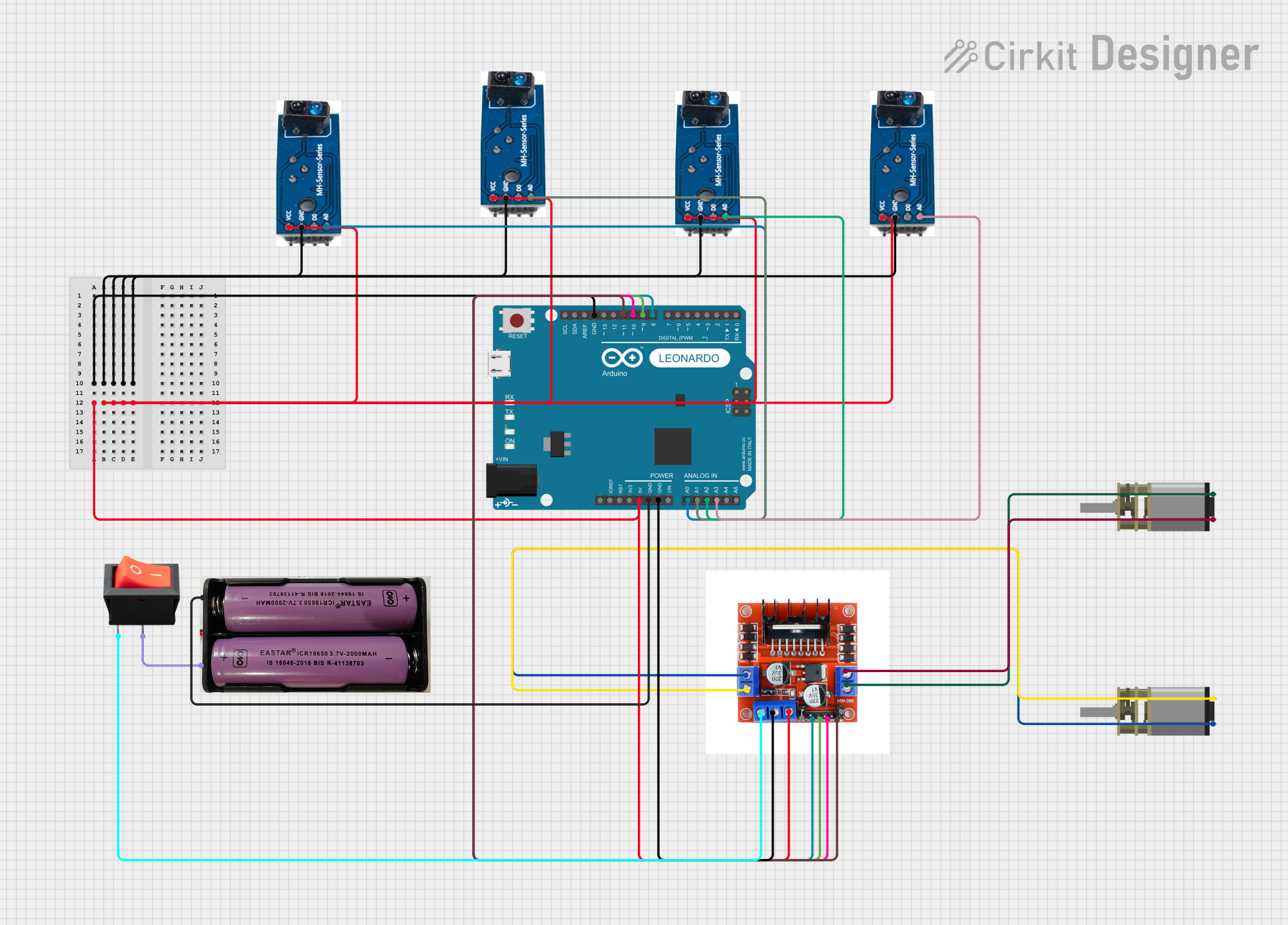
Explore Projects Built with tcrt5000
Common Applications
- Line-following robots
- Object detection in robotics
- Optical encoders for position sensing
- Proximity detection in automation systems
- Edge detection in conveyor belts
Technical Specifications
The TCRT5000 sensor has the following key technical specifications:
| Parameter | Value |
|---|---|
| Operating Voltage | 3.3V to 5V |
| Forward Current (IR LED) | 60 mA (max) |
| Collector Current | 100 mA (max) |
| Peak Wavelength | 950 nm |
| Detection Range | 2 mm to 15 mm (optimal: 2-10 mm) |
| Output Type | Analog or Digital (depending on circuit) |
| Operating Temperature | -25°C to +85°C |
Pin Configuration and Descriptions
The TCRT5000 typically has 4 pins, as described below:
| Pin Number | Name | Description |
|---|---|---|
| 1 | Emitter (A) | Anode of the IR LED (connect to a current-limiting resistor and power source). |
| 2 | Emitter (K) | Cathode of the IR LED (connect to ground). |
| 3 | Collector (C) | Collector of the phototransistor (output signal). |
| 4 | Emitter (E) | Emitter of the phototransistor (connect to ground). |
Usage Instructions
How to Use the TCRT5000 in a Circuit
- Powering the Sensor: Connect the IR LED anode (Pin 1) to a power source (3.3V or 5V) through a current-limiting resistor (typically 220Ω to 330Ω). Connect the cathode (Pin 2) to ground.
- Phototransistor Output: Connect the phototransistor's collector (Pin 3) to a pull-up resistor (e.g., 10kΩ) and then to the power source. The emitter (Pin 4) should be connected to ground.
- Signal Reading: The voltage at the collector (Pin 3) will vary based on the amount of IR light reflected back to the sensor. A higher reflection results in a lower voltage, while no reflection results in a higher voltage.
Important Considerations
- Optimal Distance: The TCRT5000 works best at a distance of 2-10 mm from the reflective surface. Ensure the object is within this range for accurate detection.
- Ambient Light: Minimize ambient light interference by shielding the sensor or using it in controlled lighting conditions.
- Reflective Surfaces: The sensor is more sensitive to highly reflective surfaces (e.g., white or shiny objects) and less sensitive to dark or matte surfaces.
Example: Connecting TCRT5000 to Arduino UNO
Below is an example of how to use the TCRT5000 with an Arduino UNO to detect an object:
// Define the pin connected to the TCRT5000 output
const int sensorPin = A0; // Analog pin A0 for reading sensor output
const int threshold = 500; // Threshold value for object detection
void setup() {
Serial.begin(9600); // Initialize serial communication
pinMode(sensorPin, INPUT); // Set the sensor pin as input
}
void loop() {
int sensorValue = analogRead(sensorPin); // Read the analog value from the sensor
// Print the sensor value to the Serial Monitor
Serial.print("Sensor Value: ");
Serial.println(sensorValue);
// Check if the sensor value is below the threshold
if (sensorValue < threshold) {
Serial.println("Object Detected!");
} else {
Serial.println("No Object Detected.");
}
delay(500); // Wait for 500ms before the next reading
}
Notes:
- Adjust the
thresholdvalue based on your specific application and environment. - Use a current-limiting resistor for the IR LED to prevent damage.
Troubleshooting and FAQs
Common Issues and Solutions
No Detection or Inconsistent Readings:
- Ensure the sensor is within the optimal detection range (2-10 mm).
- Check the connections and verify that the IR LED is powered correctly.
- Reduce ambient light interference by shielding the sensor.
False Positives:
- Use a pull-up resistor on the phototransistor's collector pin.
- Avoid highly reflective or shiny surfaces that may cause excessive IR reflection.
Sensor Not Responding:
- Verify the current-limiting resistor value for the IR LED (220Ω to 330Ω is recommended).
- Check for loose or incorrect wiring.
FAQs
Q: Can the TCRT5000 detect black surfaces?
A: The TCRT5000 is less sensitive to black or matte surfaces due to their low reflectivity. For better results, use reflective or light-colored surfaces.
Q: What is the maximum detection range of the TCRT5000?
A: The sensor can detect objects up to 15 mm away, but the optimal range is 2-10 mm.
Q: Can I use the TCRT5000 with a digital output?
A: Yes, you can use a comparator circuit (e.g., LM393) to convert the analog output to a digital signal.
Q: How do I reduce interference from ambient light?
A: Use the sensor in a controlled lighting environment or add a physical shield to block ambient light.
By following these guidelines, you can effectively use the TCRT5000 for your object detection and proximity sensing applications.