How to Use Adafruit ICM20948: Examples, Pinouts, and Specs
Introduction
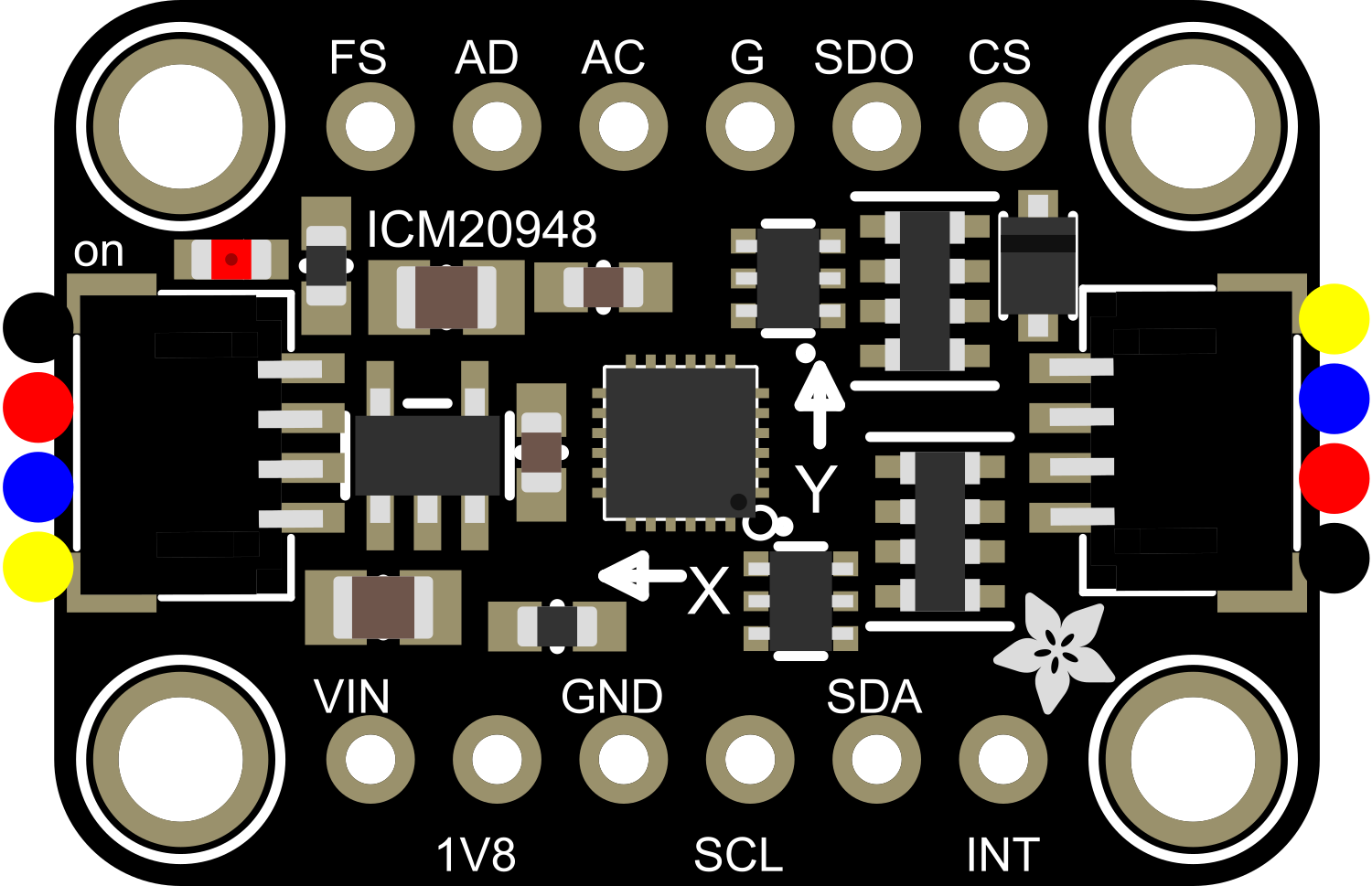
The Adafruit ICM20948 is a sophisticated 9-axis motion tracking module that integrates a 3-axis accelerometer, a 3-axis gyroscope, and a 3-axis magnetometer. This compact sensor is ideal for applications in robotics, virtual reality systems, drones, and motion tracking devices. It provides precise measurements for orientation, acceleration, and magnetic fields, making it a versatile component for a wide range of projects.
Explore Projects Built with Adafruit ICM20948
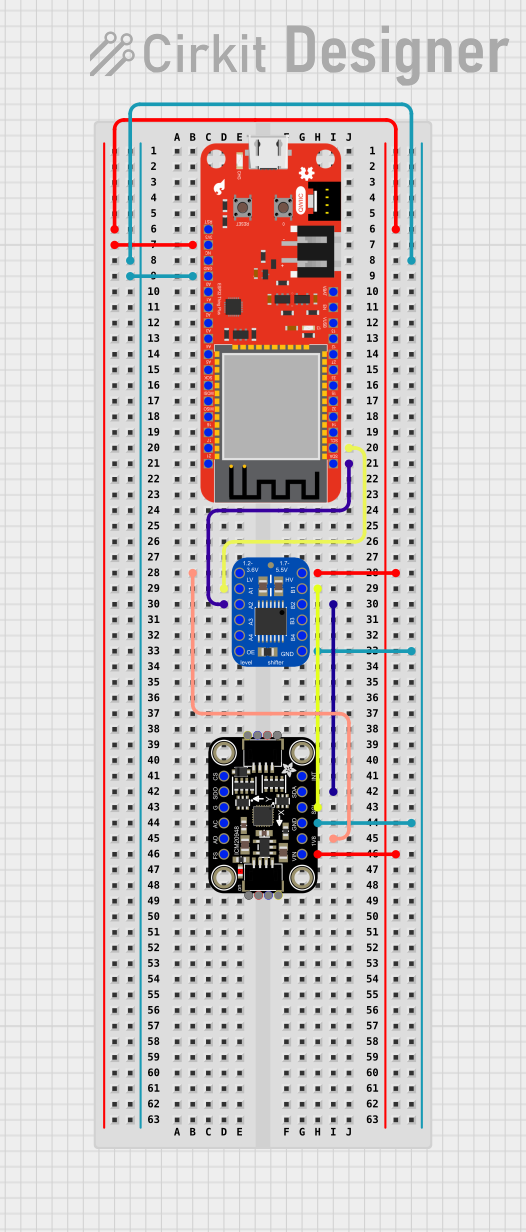
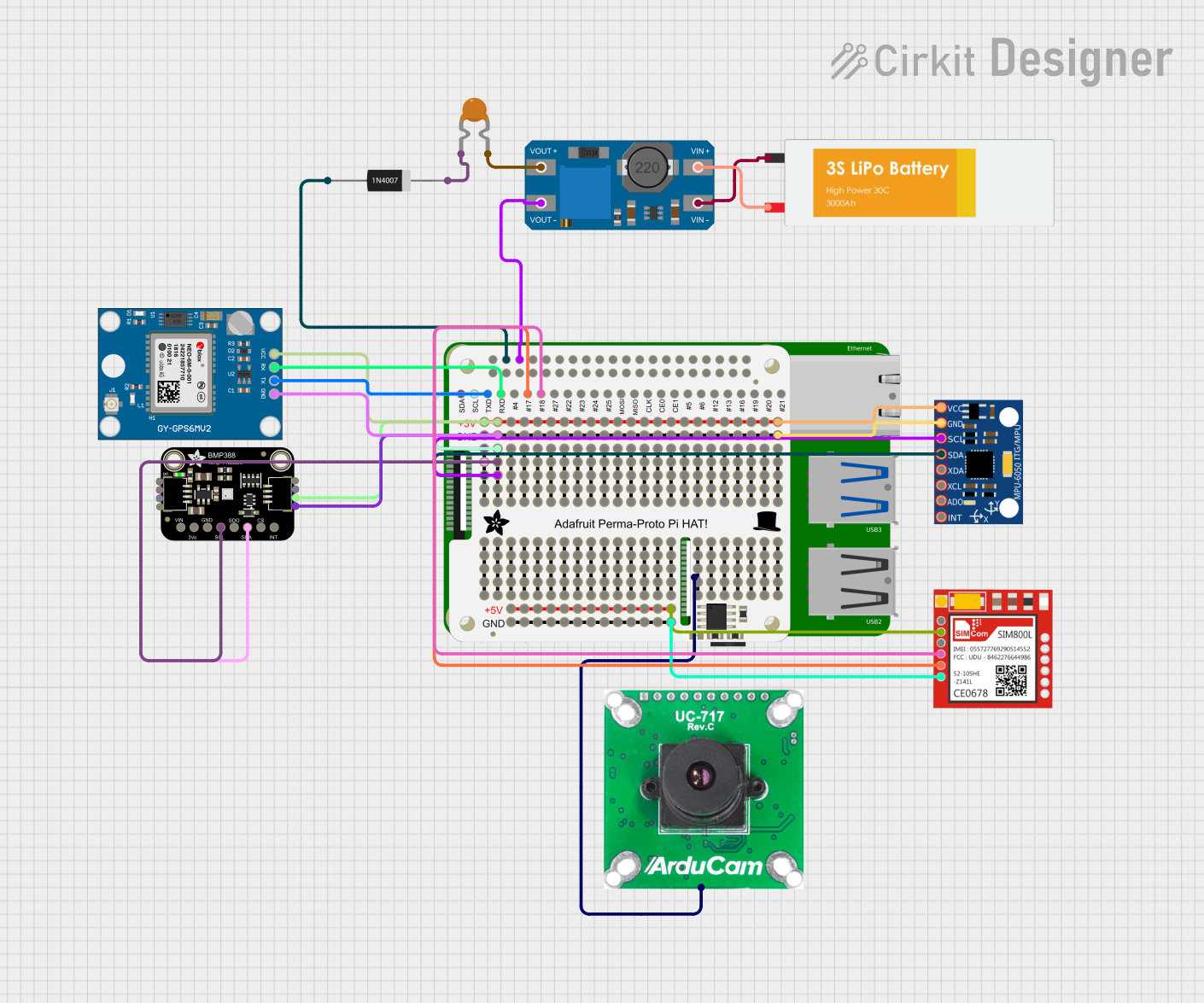
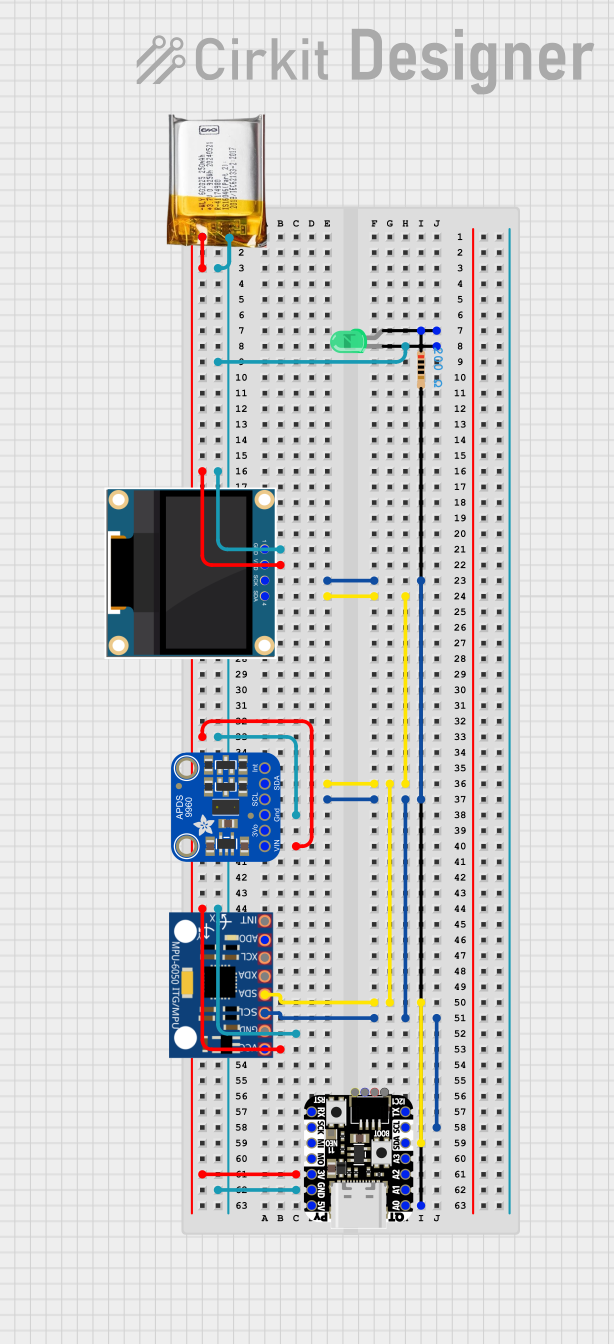
Explore Projects Built with Adafruit ICM20948
Technical Specifications
Key Features
- Accelerometer Range: ±2g, ±4g, ±8g, ±16g
- Gyroscope Range: ±250dps, ±500dps, ±1000dps, ±2000dps
- Magnetometer Range: ±4900µT
- Operating Voltage: 1.71V to 3.6V
- Interface: I2C and SPI
- Operating Temperature Range: -40°C to +85°C
Pin Configuration and Descriptions
| Pin Number | Pin Name | Description |
|---|---|---|
| 1 | VDD | Power supply (1.71V to 3.6V) |
| 2 | GND | Ground connection |
| 3 | SDA/SDI | I2C Data Line / SPI Serial Data Input |
| 4 | SCL/SCLK | I2C Clock Line / SPI Serial Clock Input |
| 5 | NCS | SPI Chip Select (Active Low) |
| 6 | AUXDA | Auxiliary I2C Data (for external sensors) |
| 7 | AUXCL | Auxiliary I2C Clock (for external sensors) |
| 8 | FSYNC | Frame Synchronization Digital Input |
| 9 | INT | Interrupt Digital Output (Active Low) |
Usage Instructions
Integration with a Circuit
To use the Adafruit ICM20948 in a circuit:
- Connect the VDD pin to a power supply between 1.71V and 3.6V.
- Connect the GND pin to the ground of your power supply.
- For I2C communication, connect the SDA and SCL pins to your microcontroller's I2C data and clock lines, respectively.
- For SPI communication, connect SDI, SCLK, and NCS to your microcontroller's SPI data in, clock, and chip select pins.
- If using the interrupt feature, connect the INT pin to a digital input on your microcontroller.
Best Practices
- Ensure that the power supply is within the specified voltage range to prevent damage.
- Use pull-up resistors on the I2C data and clock lines if they are not already present on your microcontroller board.
- When using SPI, ensure that the NCS pin is held high when the device is not in use.
- For accurate readings, calibrate the magnetometer in your application's environment.
Example Code for Arduino UNO
#include <Wire.h>
#include <Adafruit_ICM20948.h>
// Create the ICM20948 object
Adafruit_ICM20948 icm;
void setup() {
Serial.begin(115200);
while (!Serial)
delay(10); // Wait for serial console to open
// Try to initialize the ICM20948
if (!icm.begin_I2C()) {
Serial.println("Failed to find ICM20948 chip");
while (1) {
delay(10);
}
}
Serial.println("ICM20948 Found!");
}
void loop() {
// Read and print out the sensor data
if (icm.getEvent(&accel, &gyro, &temp, &mag)) {
Serial.print("Accel X: "); Serial.print(accel.acceleration.x);
Serial.print(", Y: "); Serial.print(accel.acceleration.y);
Serial.print(", Z: "); Serial.print(accel.acceleration.z);
Serial.println(" m/s^2");
Serial.print("Gyro X: "); Serial.print(gyro.gyro.x);
Serial.print(", Y: "); Serial.print(gyro.gyro.y);
Serial.print(", Z: "); Serial.print(gyro.gyro.z);
Serial.println(" rad/s");
Serial.print("Mag X: "); Serial.print(mag.magnetic.x);
Serial.print(", Y: "); Serial.print(mag.magnetic.y);
Serial.print(", Z: "); Serial.print(mag.magnetic.z);
Serial.println(" uT");
Serial.print("Temp: "); Serial.print(temp.temperature);
Serial.println(" C");
}
delay(100);
}
Troubleshooting and FAQs
Common Issues
- Sensor Not Detected: Ensure that the wiring is correct and that the power supply is within the specified range. Check for proper pull-up resistors on the I2C lines.
- Inaccurate Readings: Calibrate the sensor in the application environment. Ensure that there are no magnetic interferences near the magnetometer.
- No Data on Serial Monitor: Confirm that the correct baud rate (115200) is set in the serial monitor.
FAQs
Q: Can I use this sensor with a 5V microcontroller? A: Yes, but ensure that the ICM20948 is powered with a voltage within its operating range (1.71V to 3.6V) and use logic level converters for I2C or SPI lines.
Q: How do I calibrate the magnetometer? A: Calibration typically involves rotating the sensor in various orientations and using the collected data to adjust the readings. Adafruit provides libraries and examples that can assist with this process.
Q: What is the purpose of the FSYNC pin? A: The FSYNC pin is used for frame synchronization. It can be used to synchronize the sampling of sensor data with an external signal.
Q: How do I use the interrupt feature? A: The INT pin can be configured to trigger an interrupt on your microcontroller when certain events occur, such as new data being available. This requires additional setup in your code to configure the interrupt behavior and handle the interrupt signal.