How to Use SparkFun IMU Breakout ICM-20948: Examples, Pinouts, and Specs
Introduction
The SparkFun IMU Breakout ICM-20948 is a versatile and powerful inertial measurement unit (IMU) breakout board that features the ICM-20948 chip. This IMU combines a 3-axis gyroscope, 3-axis accelerometer, and 3-axis magnetometer into one compact package, making it ideal for applications such as drone flight control, motion tracking, and navigation systems.
Explore Projects Built with SparkFun IMU Breakout ICM-20948
Explore Projects Built with SparkFun IMU Breakout ICM-20948
Common Applications and Use Cases
- Robotics and autonomous vehicles
- Gesture recognition
- Orientation and heading measurement
- Motion analysis and fitness tracking
- Virtual and augmented reality systems
Technical Specifications
Key Technical Details
- Supply Voltage (VDD): 1.71V to 3.6V
- Interface Voltage (VDDIO): 1.71V to 3.6V
- Operating Current: 2.65 mA
- Gyroscope Sensing Range: ±250, ±500, ±1000, ±2000 degrees/sec
- Accelerometer Sensing Range: ±2g, ±4g, ±8g, ±16g
- Magnetometer Sensing Range: ±4900 µT
- Operating Temperature Range: -40°C to +85°C
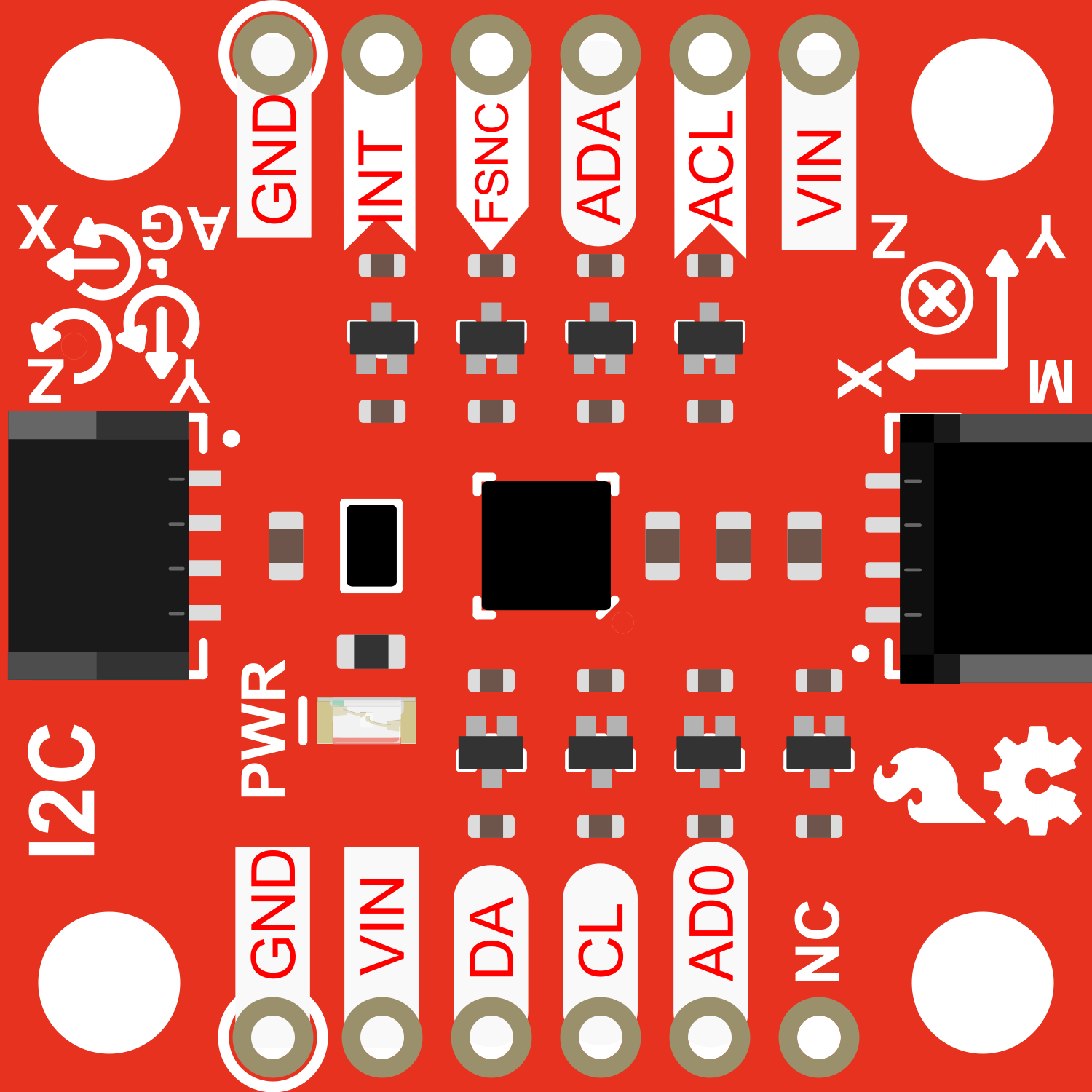
Pin Configuration and Descriptions
| Pin Number | Pin Name | Description |
|---|---|---|
| 1 | VDD | Power supply (1.71V to 3.6V) |
| 2 | GND | Ground |
| 3 | SDA | I2C Data Line / SPI Serial Data In (SDI) |
| 4 | SCL | I2C Clock Line / SPI Serial Clock (SCK) |
| 5 | NCS | SPI Chip Select (Active Low) |
| 6 | AUX_DA | Auxiliary I2C Data Line |
| 7 | AUX_CL | Auxiliary I2C Clock Line |
| 8 | FSYNC | Frame Synchronization (Active Low) |
| 9 | INT | Interrupt (Active Low) |
Usage Instructions
How to Use the Component in a Circuit
- Powering the Device: Connect the VDD pin to a power supply within the specified voltage range and connect the GND pin to the ground of your system.
- Communication: Choose between I2C or SPI for communication. For I2C, connect SDA and SCL to your microcontroller's corresponding pins. For SPI, connect SDA (SDI), SCL (SCK), and NCS to the respective SPI pins on your microcontroller.
- Interrupts: The INT pin can be connected to an interrupt-capable GPIO pin on your microcontroller to handle interrupt-driven events.
- Frame Synchronization: The FSYNC pin is optional and can be used for advanced synchronization purposes.
Important Considerations and Best Practices
- Ensure that the power supply is stable and within the specified voltage range to prevent damage to the IMU.
- Use pull-up resistors on the I2C lines if they are not already present on your microcontroller board.
- When using SPI, ensure that the NCS line is held high when the device is not in use.
- For accurate readings, calibrate the magnetometer in the environment where it will be used.
Troubleshooting and FAQs
Common Issues Users Might Face
- Inaccurate Readings: Ensure that the IMU is calibrated correctly. Avoid placing the IMU near magnetic or metallic objects that could interfere with the magnetometer.
- Communication Errors: Check the wiring and ensure that the correct communication protocol (I2C or SPI) is selected in your code. Also, verify that the pull-up resistors are in place for I2C communication.
Solutions and Tips for Troubleshooting
- No Data Output: Verify that the power supply is within the specified range and that all connections are secure.
- Intermittent Connection: Check for loose wires or solder joints. Ensure that the pins are not shorting to each other.
FAQs
Q: Can I use multiple ICM-20948 IMUs on the same I2C bus? A: Yes, the ICM-20948 has an I2C address selection pin that allows for multiple devices on the same bus.
Q: How do I calibrate the magnetometer? A: Calibration typically involves rotating the IMU in various orientations and using software to compute the calibration parameters.
Q: What is the default I2C address of the ICM-20948? A: The default I2C address is 0x69, which can be changed to 0x68 when the AD0 pin is grounded.
Example Code for Arduino UNO
Below is a simple example of how to initialize the ICM-20948 using the I2C protocol with an Arduino UNO. This code assumes the use of a library that handles the low-level communication and sensor fusion.
#include <Wire.h>
#include <SparkFun_ICM-20948_IMU.h>
ICM_20948_I2C myIMU; // Create an ICM-20948 object
void setup() {
Wire.begin();
Serial.begin(115200);
// Initialize the IMU
if (myIMU.begin() != ICM_20948_Stat_Ok) {
Serial.println("ICM-20948 initialization failed");
while (1);
}
Serial.println("ICM-20948 initialization successful");
}
void loop() {
// Check if new data is available
if (myIMU.dataReady()) {
myIMU.getAGMT(); // Get accelerometer, gyroscope, magnetometer, and temperature data
// Print the accelerometer values
Serial.print("Accel X: ");
Serial.print(myIMU.accX());
Serial.print(" Y: ");
Serial.print(myIMU.accY());
Serial.print(" Z: ");
Serial.println(myIMU.accZ());
// Add similar statements to print gyroscope and magnetometer data
}
delay(100); // Adjust the delay as needed
}
Note: This example assumes the existence of a library named SparkFun_ICM-20948_IMU.h which provides the necessary functions to interact with the ICM-20948. You will need to install the appropriate library through the Arduino Library Manager before compiling this code.