How to Use TPIC6B595N: Examples, Pinouts, and Specs
Introduction
The TPIC6B595N is an 8-bit shift register with output latches and high-current output capability, manufactured by Texas Instruments. It is designed to drive LEDs, relays, and other loads requiring high current. The device features a serial input and parallel output, making it ideal for applications where efficient data transfer and control are required.
Explore Projects Built with TPIC6B595N

Explore Projects Built with TPIC6B595N
Common Applications
- LED matrix displays
- Relay control systems
- Industrial automation
- Digital signage
- Motor control circuits
Technical Specifications
Key Technical Details
- Manufacturer Part ID: 296-1956-5-ND
- Supply Voltage (Vcc): 4.5V to 5.5V
- Output Voltage (Vout): Up to 50V
- Maximum Output Current (Iout): 150mA per channel
- Shift Register Clock Frequency: Up to 25MHz
- Operating Temperature Range: -40°C to +125°C
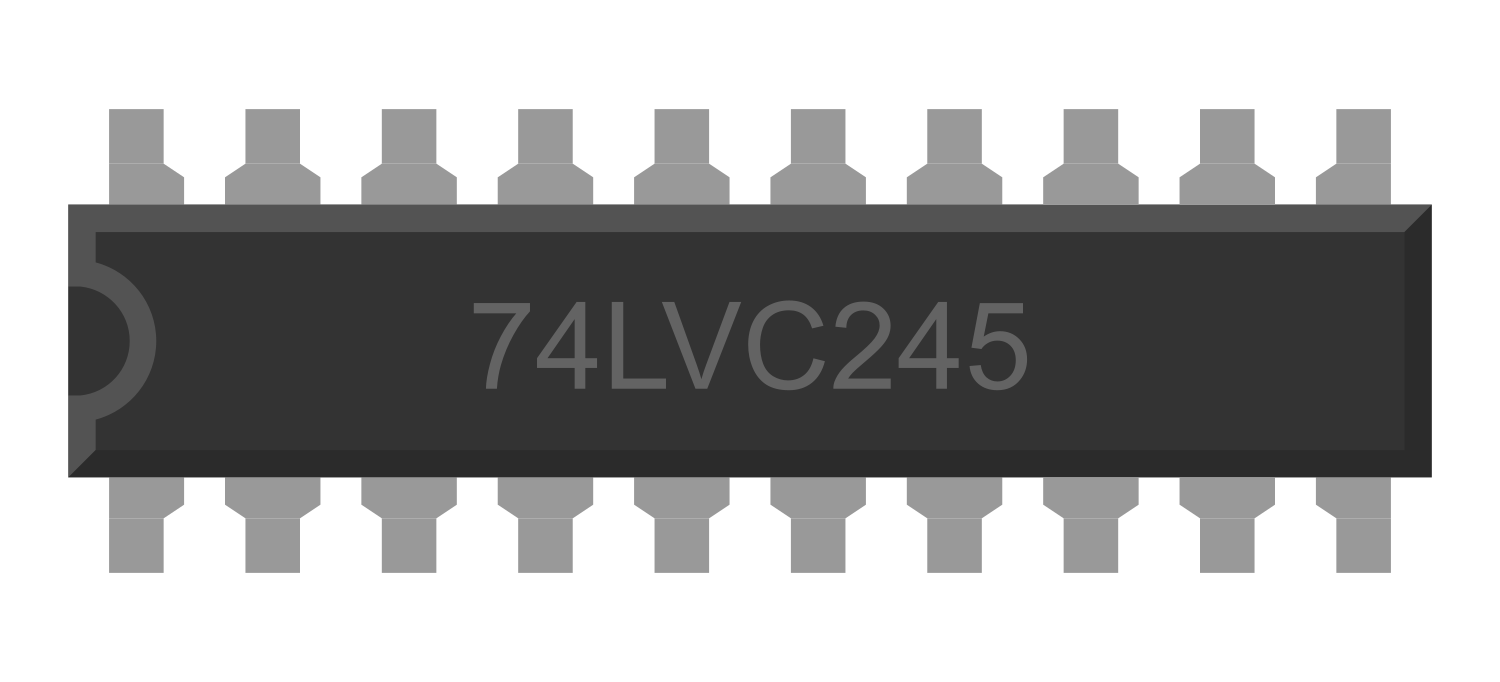
- Package Type: 16-pin PDIP (Plastic Dual In-line Package)
Pin Configuration and Descriptions
The TPIC6B595N has 16 pins, as described in the table below:
| Pin Number | Pin Name | Description |
|---|---|---|
| 1 | GND | Ground connection. |
| 2 | SRCLR | Shift register clear (active low). Clears the shift register when pulled low. |
| 3 | SRCLK | Shift register clock input. Data is shifted on the rising edge of this clock. |
| 4 | RCLK | Register clock input. Latches data from the shift register to the output. |
| 5 | SER | Serial data input. Data is shifted into the register through this pin. |
| 6-13 | Q1-Q8 | Parallel outputs. High-current outputs for driving loads. |
| 14 | G | Output enable (active low). Enables or disables the outputs. |
| 15 | Vcc | Supply voltage. Connect to 5V. |
| 16 | NC | No connection. |
Usage Instructions
How to Use the TPIC6B595N in a Circuit
- Power Supply: Connect the Vcc pin to a 5V power supply and the GND pin to ground.
- Data Input: Use the SER pin to input serial data. Data is shifted into the register on the rising edge of the SRCLK pin.
- Latch Data: Use the RCLK pin to latch the data from the shift register to the output pins (Q1-Q8).
- Output Enable: Ensure the G pin is pulled low to enable the outputs. Pulling it high disables the outputs.
- Load Driving: Connect the loads (e.g., LEDs, relays) to the Q1-Q8 pins. Ensure the load current does not exceed 150mA per channel.
Important Considerations
- Use current-limiting resistors when driving LEDs to prevent damage to the LEDs and the TPIC6B595N.
- Ensure the total current drawn by all outputs does not exceed the device's maximum power dissipation.
- Decouple the power supply with a 0.1µF capacitor close to the Vcc pin to reduce noise.
Example: Connecting to an Arduino UNO
The TPIC6B595N can be easily interfaced with an Arduino UNO for controlling multiple LEDs. Below is an example code snippet:
// Define pin connections
#define DATA_PIN 2 // SER pin of TPIC6B595N
#define CLOCK_PIN 3 // SRCLK pin of TPIC6B595N
#define LATCH_PIN 4 // RCLK pin of TPIC6B595N
void setup() {
// Set pin modes
pinMode(DATA_PIN, OUTPUT);
pinMode(CLOCK_PIN, OUTPUT);
pinMode(LATCH_PIN, OUTPUT);
}
void loop() {
// Example: Turn on LEDs in a binary pattern
for (int i = 0; i < 256; i++) {
digitalWrite(LATCH_PIN, LOW); // Disable latching
shiftOut(DATA_PIN, CLOCK_PIN, MSBFIRST, i); // Send data to shift register
digitalWrite(LATCH_PIN, HIGH); // Latch data to outputs
delay(500); // Wait for 500ms
}
}
Notes:
- The
shiftOutfunction sends data to the TPIC6B595N one bit at a time, starting with the most significant bit (MSBFIRST). - Ensure the G pin is connected to ground to enable the outputs.
Troubleshooting and FAQs
Common Issues and Solutions
Outputs Not Responding:
- Ensure the G pin is connected to ground (active low).
- Verify that the RCLK pin is toggled after shifting data to latch the outputs.
LEDs Not Lighting Up:
- Check the current-limiting resistors and ensure they are of appropriate value.
- Verify the power supply voltage and connections to the Vcc and GND pins.
Data Not Shifting Correctly:
- Ensure the SRCLK pin is receiving a clean clock signal.
- Check the SER pin for proper data input.
Overheating:
- Ensure the total current drawn by all outputs does not exceed the device's maximum power dissipation.
- Use a heatsink or improve ventilation if necessary.
FAQs
Q1: Can the TPIC6B595N drive motors directly?
A1: The TPIC6B595N can drive small motors, but for larger motors, use an external driver circuit to handle higher currents.
Q2: What happens if the SRCLR pin is left floating?
A2: The SRCLR pin should be pulled high during normal operation. Leaving it floating may cause unpredictable behavior.
Q3: Can multiple TPIC6B595N chips be daisy-chained?
A3: Yes, connect the Q8 pin of the first chip to the SER pin of the next chip, and share the SRCLK and RCLK signals across all chips.
By following this documentation, users can effectively integrate the TPIC6B595N into their projects for reliable and efficient load control.