How to Use Adafruit Feather M4 Express CAN: Examples, Pinouts, and Specs
Introduction
The Adafruit Feather M4 Express CAN is a versatile and powerful development board that harnesses the capabilities of the ATSAMD51 microcontroller. This board is part of the Feather ecosystem, known for its compact size, portability, and extensive I/O options. The inclusion of CAN-Bus connectivity makes it ideal for automotive applications, industrial automation, and any project where robust serial communication is required. The ARM Cortex-M4 core with a floating-point unit runs at 120 MHz, providing high computational performance for complex tasks.
Explore Projects Built with Adafruit Feather M4 Express CAN
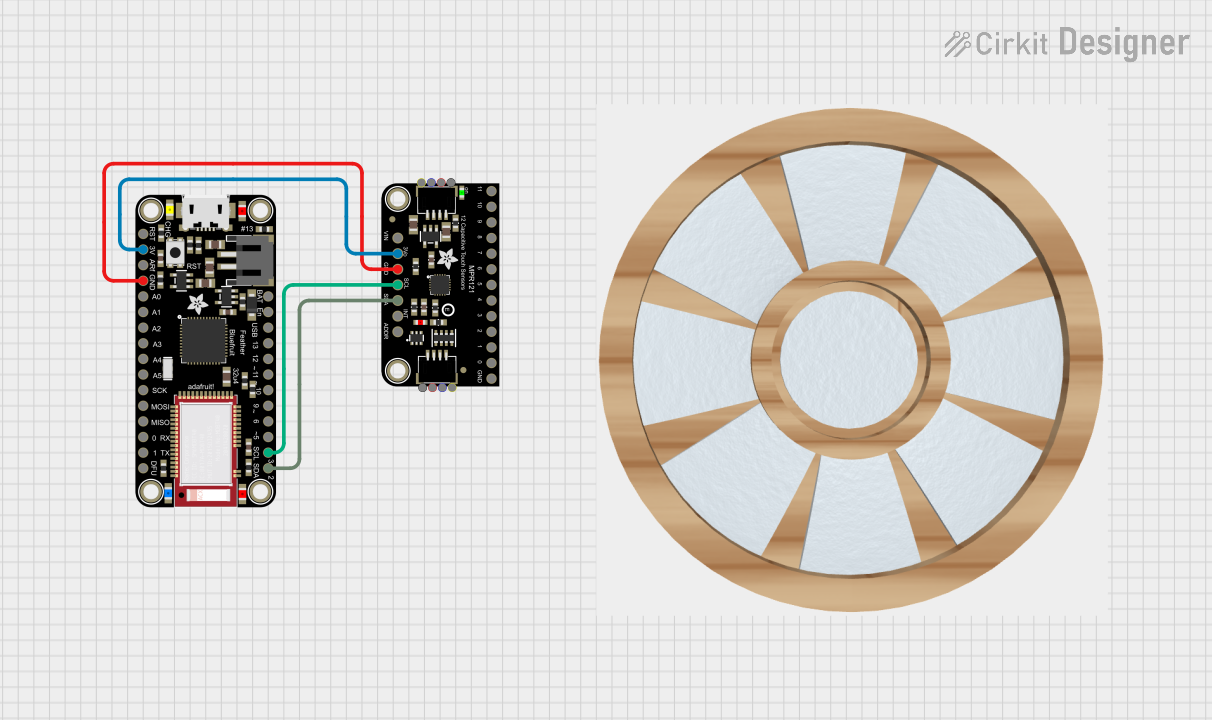

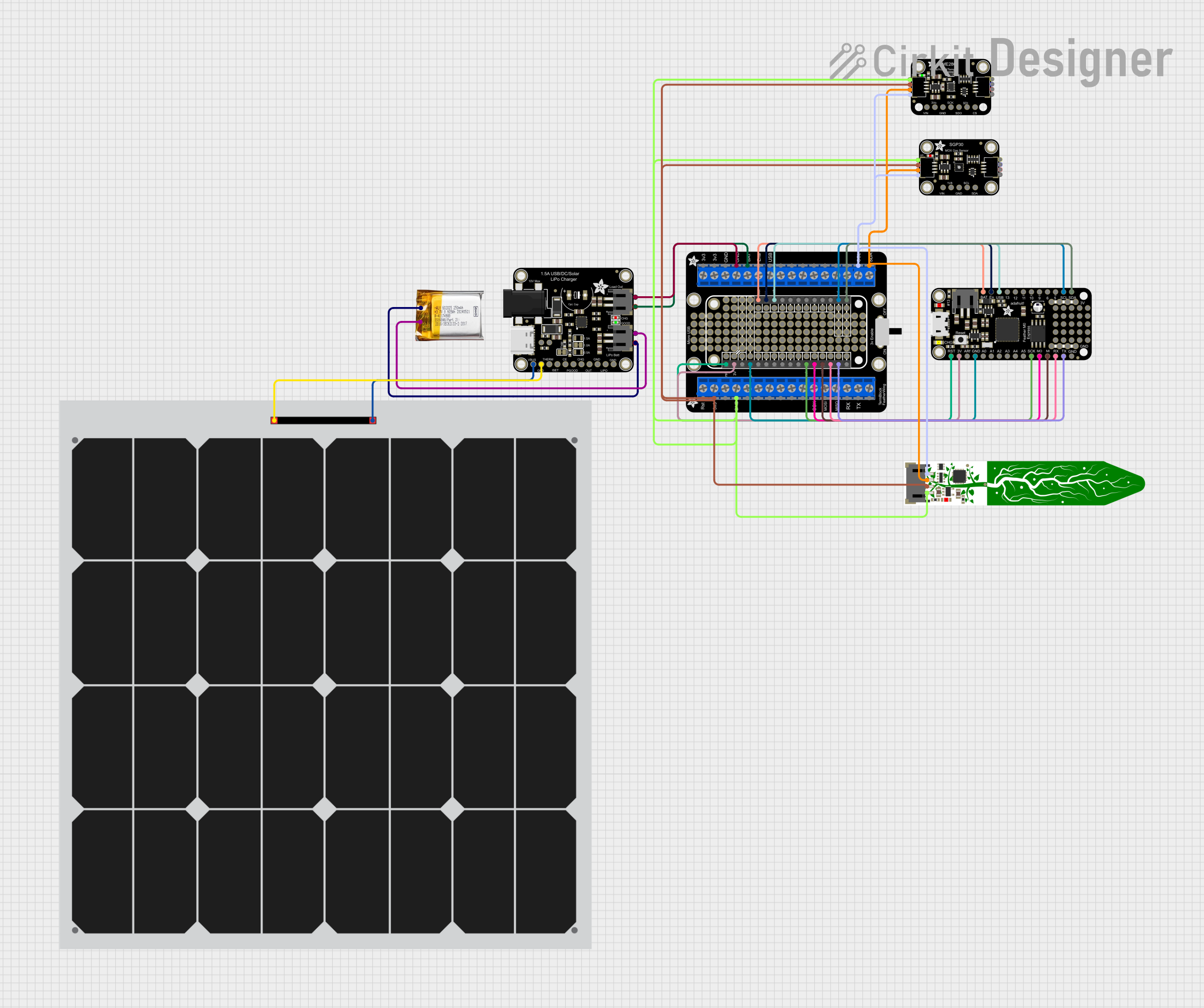
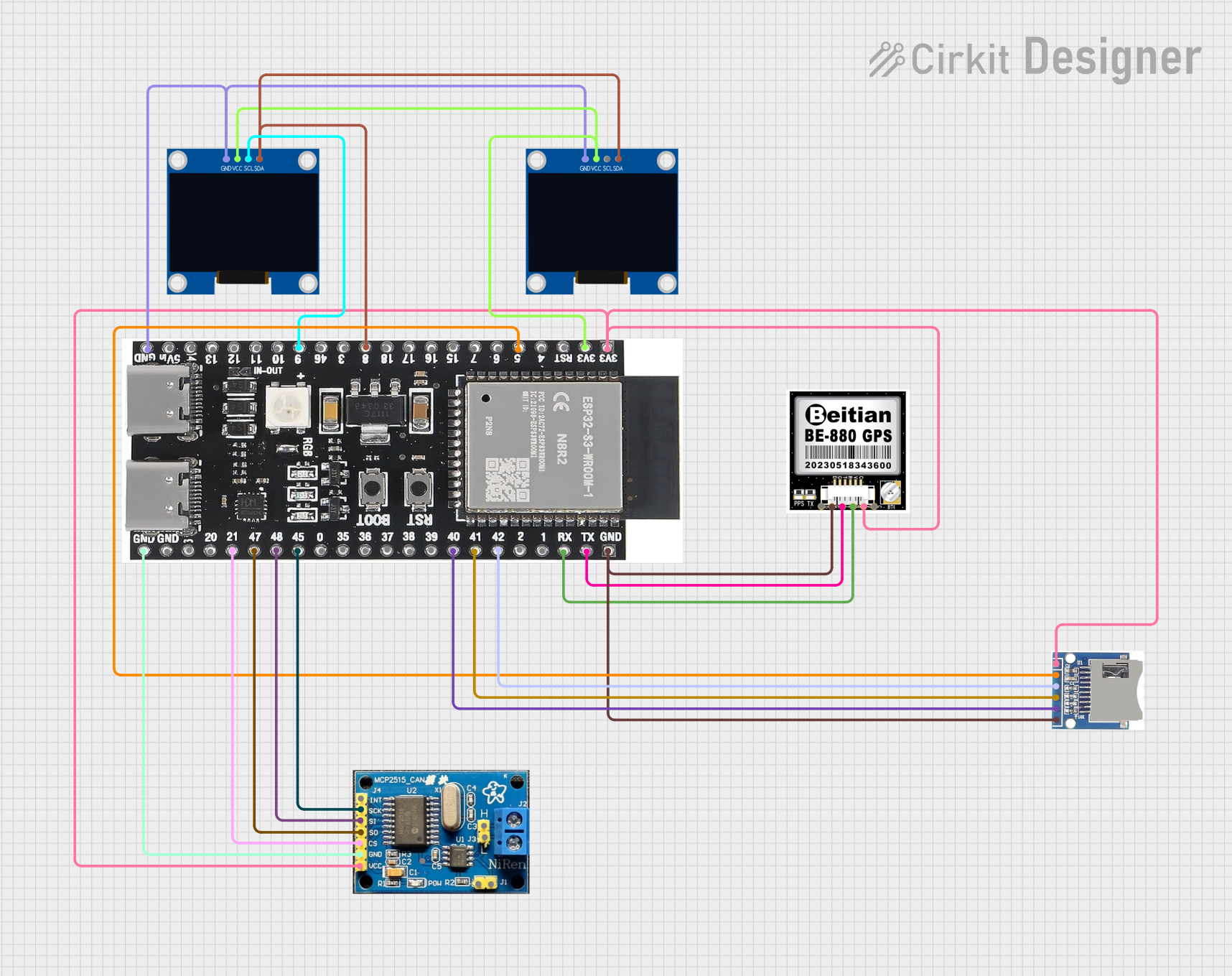
Explore Projects Built with Adafruit Feather M4 Express CAN
Common Applications and Use Cases
- Automotive diagnostics and networking
- Industrial control systems
- Home automation
- Robotics
- Data logging and telemetry
Technical Specifications
Key Technical Details
- Microcontroller: ATSAMD51J19
- Clock Speed: 120 MHz
- Flash Memory: 512 KB
- SRAM: 192 KB
- Operating Voltage: 3.3V
- I/O Pins: 21, with 12 PWM and 6 ADC channels
- CAN Controller: MCP2515 with SN65HVD230 transceiver
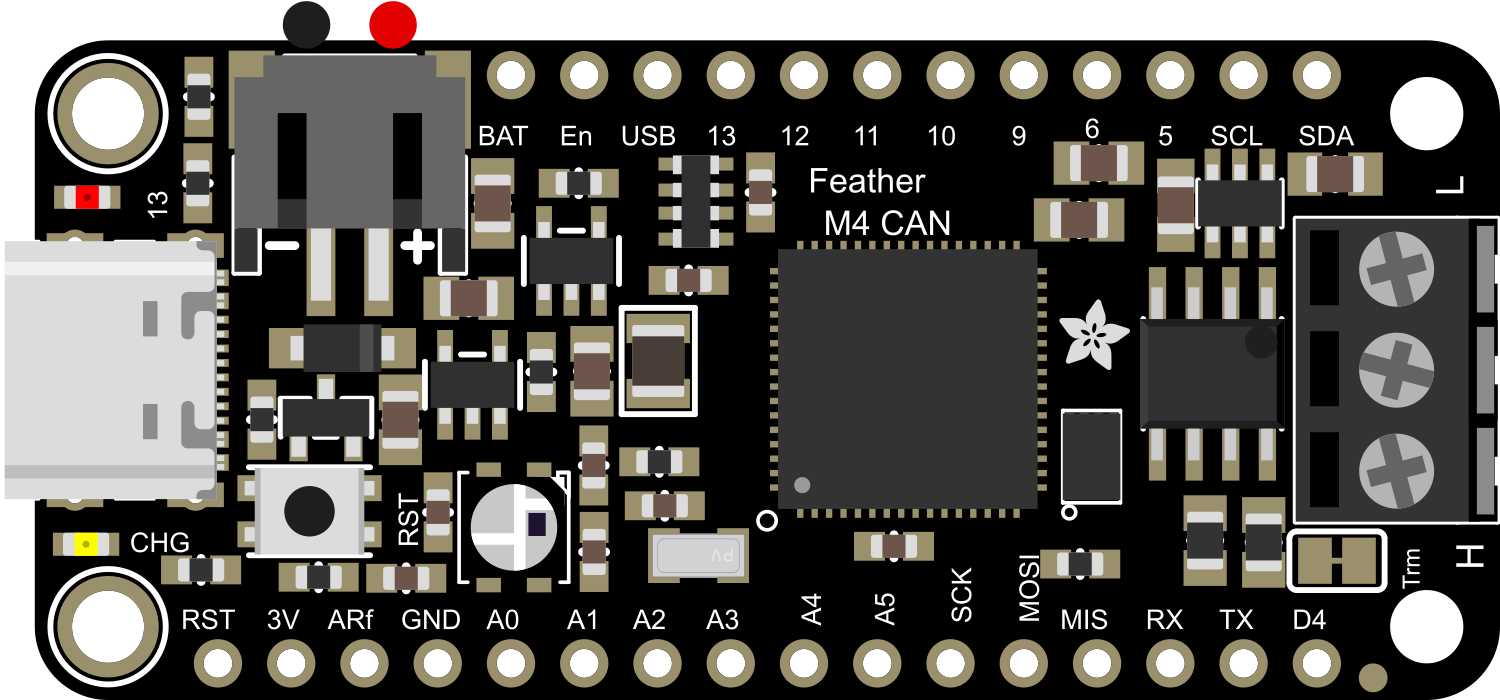
Pin Configuration and Descriptions
| Pin Number | Function | Description |
|---|---|---|
| 1 | GND | Ground |
| 2 | 3V | 3.3V power supply output |
| 3 | AREF | Analog reference voltage for ADC |
| 4-9 | A0-A5 | Analog input pins |
| 10-15 | D5-D10 | Digital I/O pins, PWM capable |
| 16-17 | SCK, MISO, MOSI | SPI communication pins |
| 18-19 | SDA, SCL | I2C communication pins |
| 20 | RX | UART receive pin |
| 21 | TX | UART transmit pin |
| 22 | CAN_RX | CAN-Bus receive pin |
| 23 | CAN_TX | CAN-Bus transmit pin |
Usage Instructions
How to Use the Component in a Circuit
- Powering the Board: Connect a 3.7V LiPo battery to the JST connector for portable applications or supply 5V to the USB or VBUS pin for stationary projects.
- Programming: Use the USB interface to program the board with the Arduino IDE or CircuitPython.
- Connecting to CAN-Bus: Attach the CAN_H and CAN_L lines from your CAN network to the CAN_RX and CAN_TX pins, respectively.
Important Considerations and Best Practices
- Ensure that the power supply is within the recommended voltage range to prevent damage.
- When using the CAN-Bus, a 120-ohm termination resistor may be necessary at both ends of the bus for proper communication.
- Use proper ESD precautions when handling the board to avoid static damage to the microcontroller.
Troubleshooting and FAQs
Common Issues Users Might Face
- Board not recognized by computer: Check the USB cable and connections; try a different USB port or cable.
- CAN-Bus communication errors: Verify the termination resistors and the integrity of the CAN_H and CAN_L connections.
- Sketch upload failure: Ensure the correct board and port are selected in the Arduino IDE.
Solutions and Tips for Troubleshooting
- If the board is not recognized, press the reset button twice quickly to enter bootloader mode.
- For CAN-Bus issues, use a CAN-Bus analyzer to monitor the network and diagnose communication problems.
- Check for updates to board definitions or drivers if you encounter upload issues.
Example Code for Arduino UNO
#include <SPI.h>
#include <mcp_can.h>
// Initialize MCP_CAN instance with SPI CS Pin 10
MCP_CAN CAN0(10);
void setup() {
Serial.begin(115200);
// Initialize CAN0 at 500 kbps
if (CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) == CAN_OK) {
Serial.println("CAN Bus Module Initialized Successfully!");
} else {
Serial.println("CAN Bus Module Initialization Failed!");
}
}
void loop() {
// Check if data is available to read
if (CAN0.checkReceive() == CAN_MSGAVAIL) {
unsigned char len = 0;
unsigned char buf[8];
// Read data: len = data length, buf = data byte(s)
CAN0.readMsgBuf(&len, buf);
// Print received data
for (int i = 0; i < len; i++) {
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println();
}
}
Note: This example demonstrates basic CAN-Bus communication using the MCP_CAN library. Ensure that the library is installed in your Arduino IDE before compiling the sketch. Adjust the CS pin number and CAN bus speed according to your specific setup.