How to Use XM125 Sparkfun: Examples, Pinouts, and Specs

Introduction
The XM125 is a GPS module from Sparkfun designed to provide accurate and reliable positioning data. With its compact design and low power consumption, the XM125 is ideal for applications where space and energy efficiency are critical. This module is widely used in robotics, drones, vehicle tracking, and other GPS-based systems. Its ease of integration and robust performance make it a popular choice for both hobbyists and professionals.
Explore Projects Built with XM125 Sparkfun
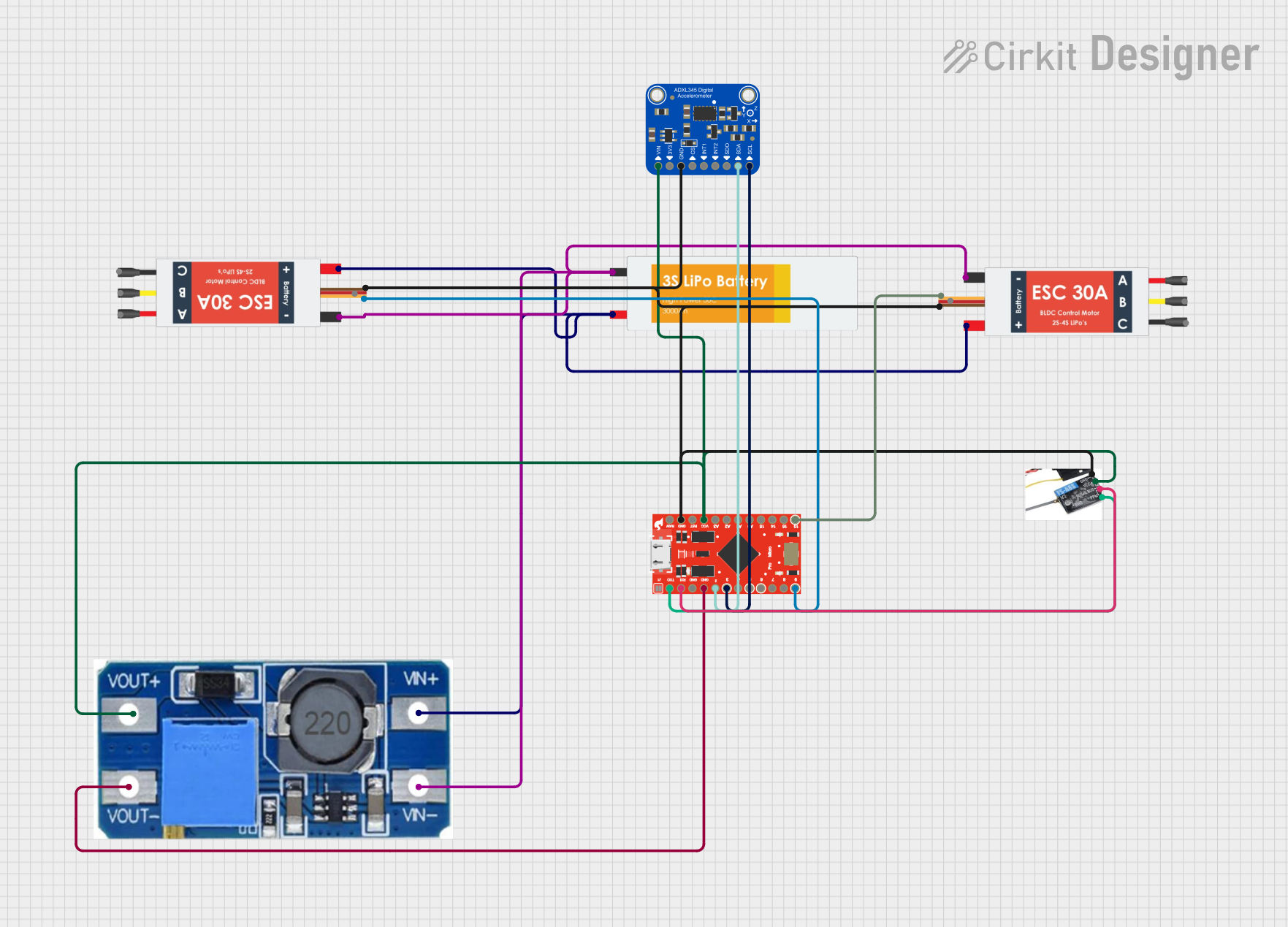
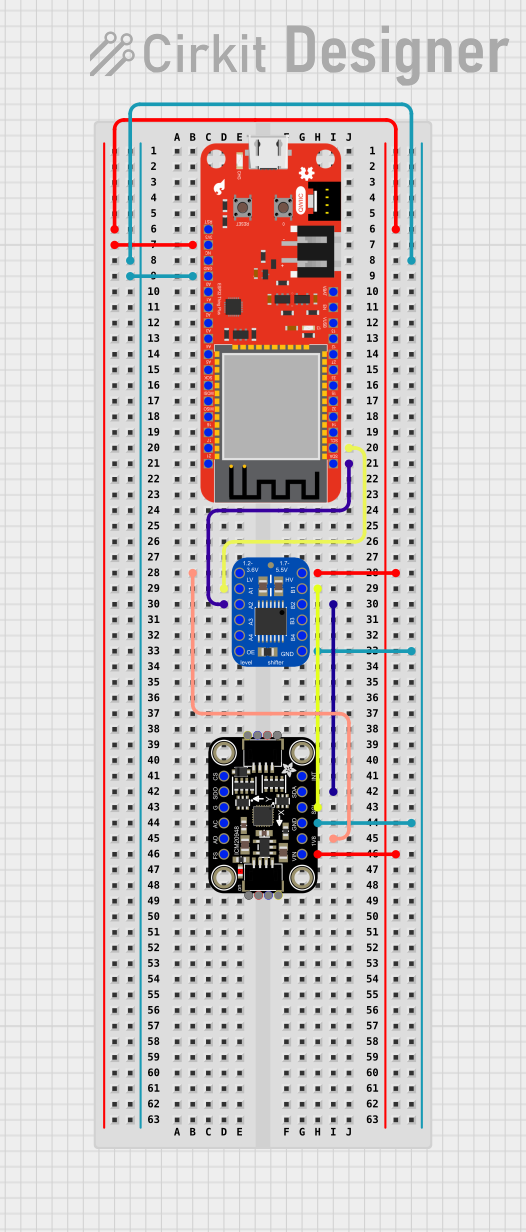
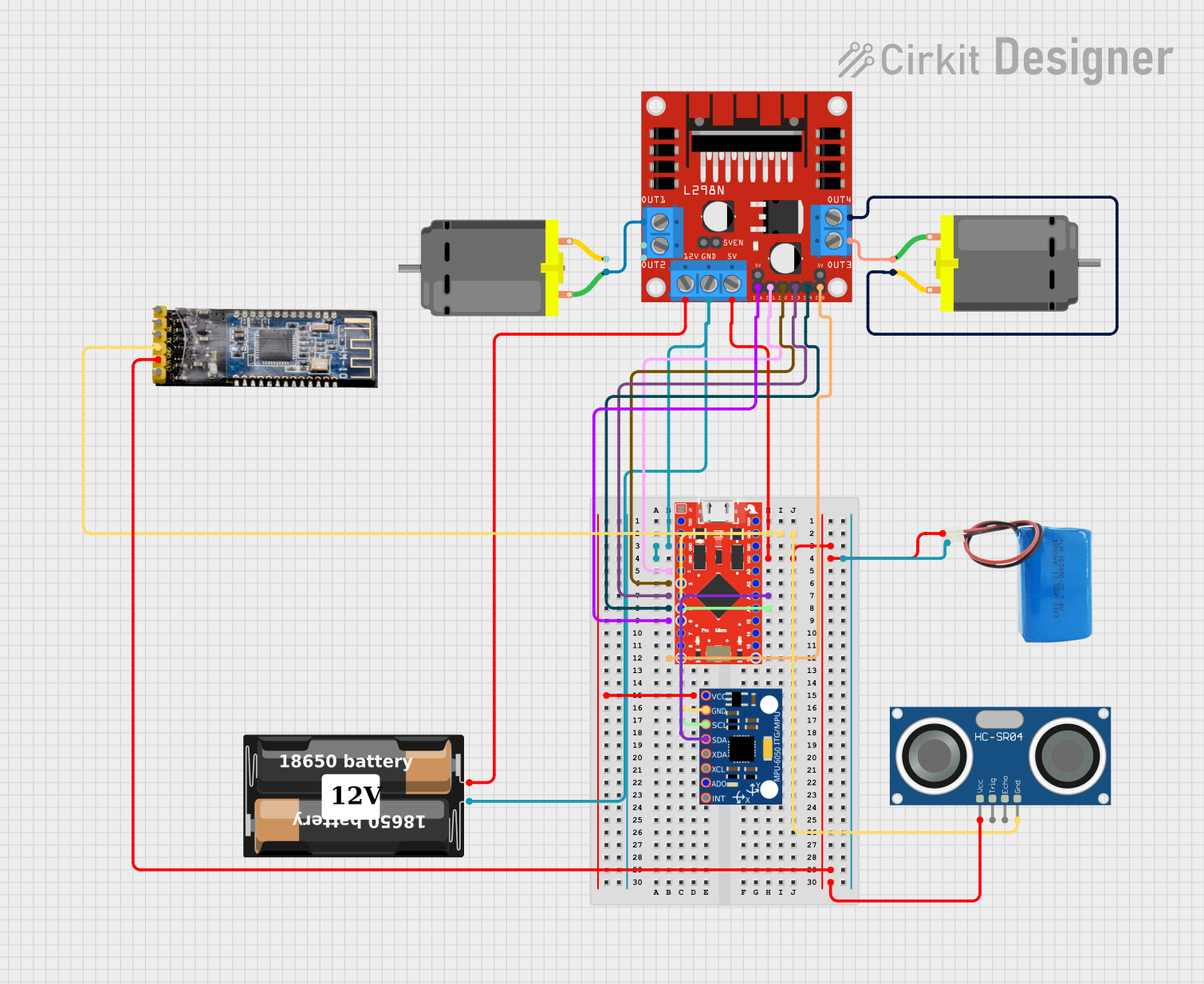
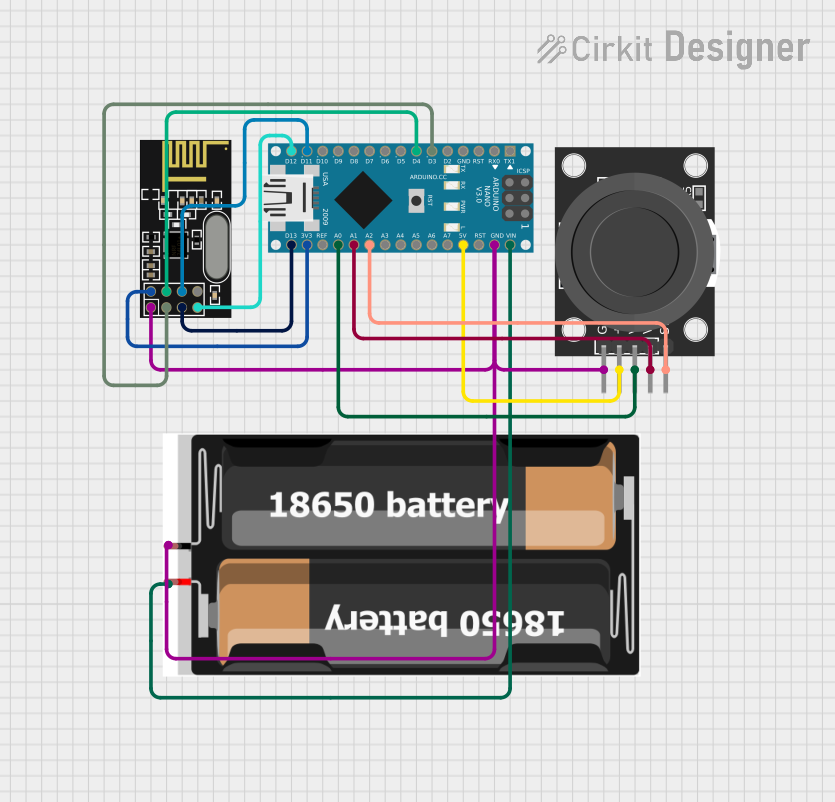
Explore Projects Built with XM125 Sparkfun
Technical Specifications
Below are the key technical details of the XM125 GPS module:
- Input Voltage: 3.3V to 5.5V
- Power Consumption: ~30mA (active mode)
- Positioning Accuracy: ±2.5 meters (CEP)
- Update Rate: Up to 10 Hz
- Communication Interface: UART (default baud rate: 9600 bps)
- Operating Temperature: -40°C to +85°C
- Dimensions: 16mm x 12.2mm x 2.4mm
- Antenna: External antenna required (U.FL connector)
Pin Configuration and Descriptions
The XM125 module has a total of 6 pins. The table below describes each pin and its function:
| Pin | Name | Description |
|---|---|---|
| 1 | VCC | Power supply input (3.3V to 5.5V). |
| 2 | GND | Ground connection. |
| 3 | TX | UART Transmit pin. Sends GPS data to the host microcontroller or device. |
| 4 | RX | UART Receive pin. Receives configuration commands from the host device. |
| 5 | PPS | Pulse Per Second output. Provides a precise timing pulse for synchronization. |
| 6 | EN | Enable pin. Pull high to enable the module; pull low to disable it. |
Usage Instructions
How to Use the XM125 in a Circuit
- Power Supply: Connect the VCC pin to a 3.3V or 5V power source and the GND pin to ground.
- UART Communication: Connect the TX pin of the XM125 to the RX pin of your microcontroller, and the RX pin of the XM125 to the TX pin of your microcontroller.
- Antenna: Attach an external GPS antenna to the U.FL connector for optimal signal reception.
- Enable the Module: Ensure the EN pin is pulled high to activate the module.
- Data Reading: Use a UART interface to read NMEA sentences (standard GPS data format) from the module.
Important Considerations and Best Practices
- Antenna Placement: Place the GPS antenna in an open area with a clear view of the sky for the best signal reception.
- Power Stability: Use a stable power supply to avoid fluctuations that could affect the module's performance.
- Baud Rate Configuration: The default baud rate is 9600 bps. If needed, you can configure the baud rate using specific commands sent via the UART interface.
- PPS Pin: The PPS pin can be used for precise timing applications, such as synchronizing clocks in time-sensitive systems.
Example: Connecting XM125 to an Arduino UNO
Below is an example of how to connect the XM125 to an Arduino UNO and read GPS data:
Circuit Connections
- XM125 VCC → Arduino 5V
- XM125 GND → Arduino GND
- XM125 TX → Arduino Digital Pin 4 (SoftwareSerial RX)
- XM125 RX → Arduino Digital Pin 3 (SoftwareSerial TX)
Arduino Code
#include <SoftwareSerial.h>
// Define RX and TX pins for SoftwareSerial
SoftwareSerial gpsSerial(4, 3); // RX = Pin 4, TX = Pin 3
void setup() {
Serial.begin(9600); // Initialize Serial Monitor
gpsSerial.begin(9600); // Initialize GPS module communication
Serial.println("XM125 GPS Module Test");
}
void loop() {
// Check if data is available from the GPS module
while (gpsSerial.available()) {
char c = gpsSerial.read(); // Read one character from GPS module
Serial.print(c); // Print the character to the Serial Monitor
// Note: GPS data is sent in NMEA sentences. You can parse these
// sentences to extract specific information like latitude, longitude,
// and time.
}
}
Troubleshooting and FAQs
Common Issues and Solutions
No GPS Data Received
- Cause: Incorrect wiring or baud rate mismatch.
- Solution: Double-check the connections and ensure the baud rate is set to 9600 bps.
Weak or No GPS Signal
- Cause: Antenna placement is obstructed or in a poor location.
- Solution: Place the antenna in an open area with a clear view of the sky.
Module Not Powering On
- Cause: Insufficient power supply or EN pin not pulled high.
- Solution: Verify the power supply voltage and ensure the EN pin is connected to a high logic level.
Data Corruption
- Cause: Electrical noise or interference.
- Solution: Use shorter wires and ensure proper grounding to minimize noise.
FAQs
Q: Can I use the XM125 with a 3.3V microcontroller?
- A: Yes, the XM125 is compatible with both 3.3V and 5V systems.
Q: How do I parse NMEA sentences?
- A: You can use libraries like TinyGPS++ or NeoGPS in Arduino to parse NMEA sentences and extract GPS data.
Q: What is the purpose of the PPS pin?
- A: The PPS pin provides a precise timing pulse that can be used for synchronization in time-sensitive applications.
Q: Can I change the update rate of the XM125?
- A: Yes, the update rate can be configured up to 10 Hz using specific configuration commands sent via UART.
This concludes the documentation for the XM125 Sparkfun GPS module.