How to Use myRIO: Examples, Pinouts, and Specs

Introduction
The myRIO device is an advanced embedded hardware platform designed by National Instruments that integrates a real-time processor, a field-programmable gate array (FPGA), and a variety of input/output (I/O) options into a single compact unit. This powerful tool is commonly used in education and research for designing control systems, mechatronics, robotics, and other applications requiring real-time processing and flexible hardware interfacing.
Explore Projects Built with myRIO
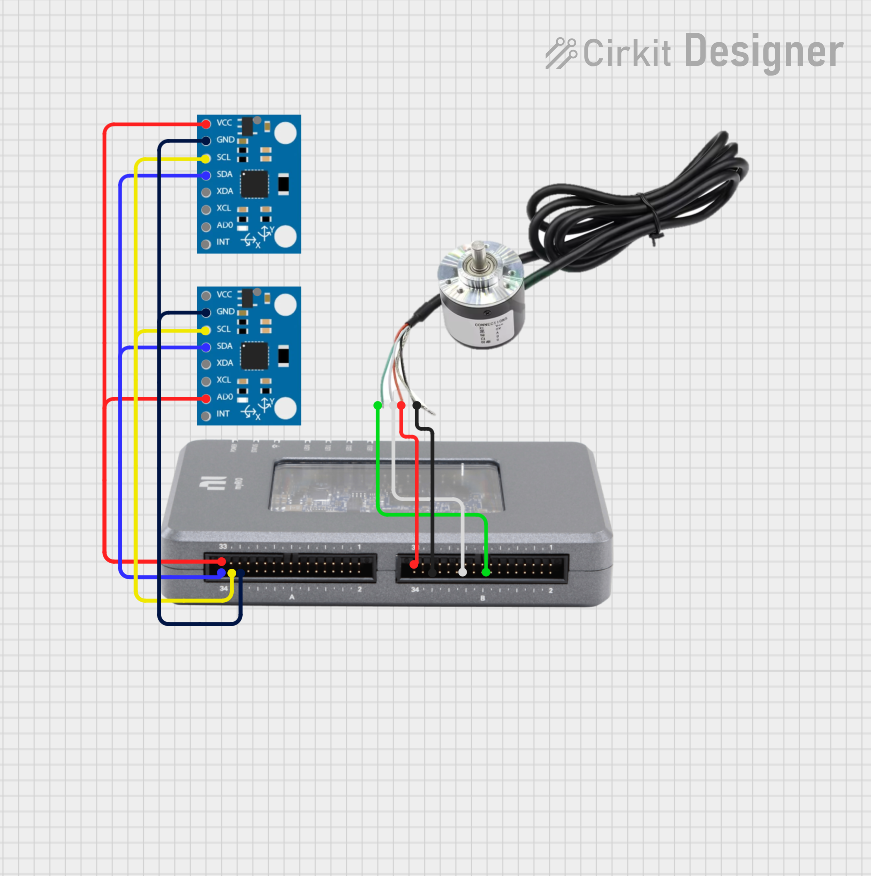
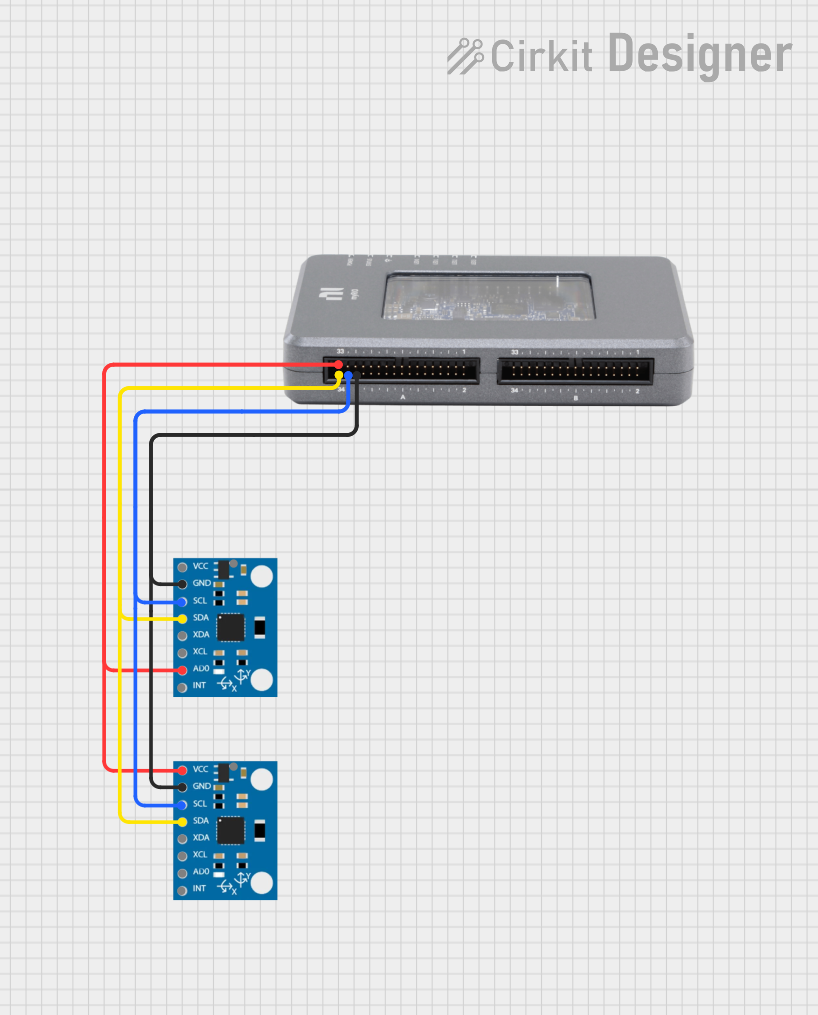

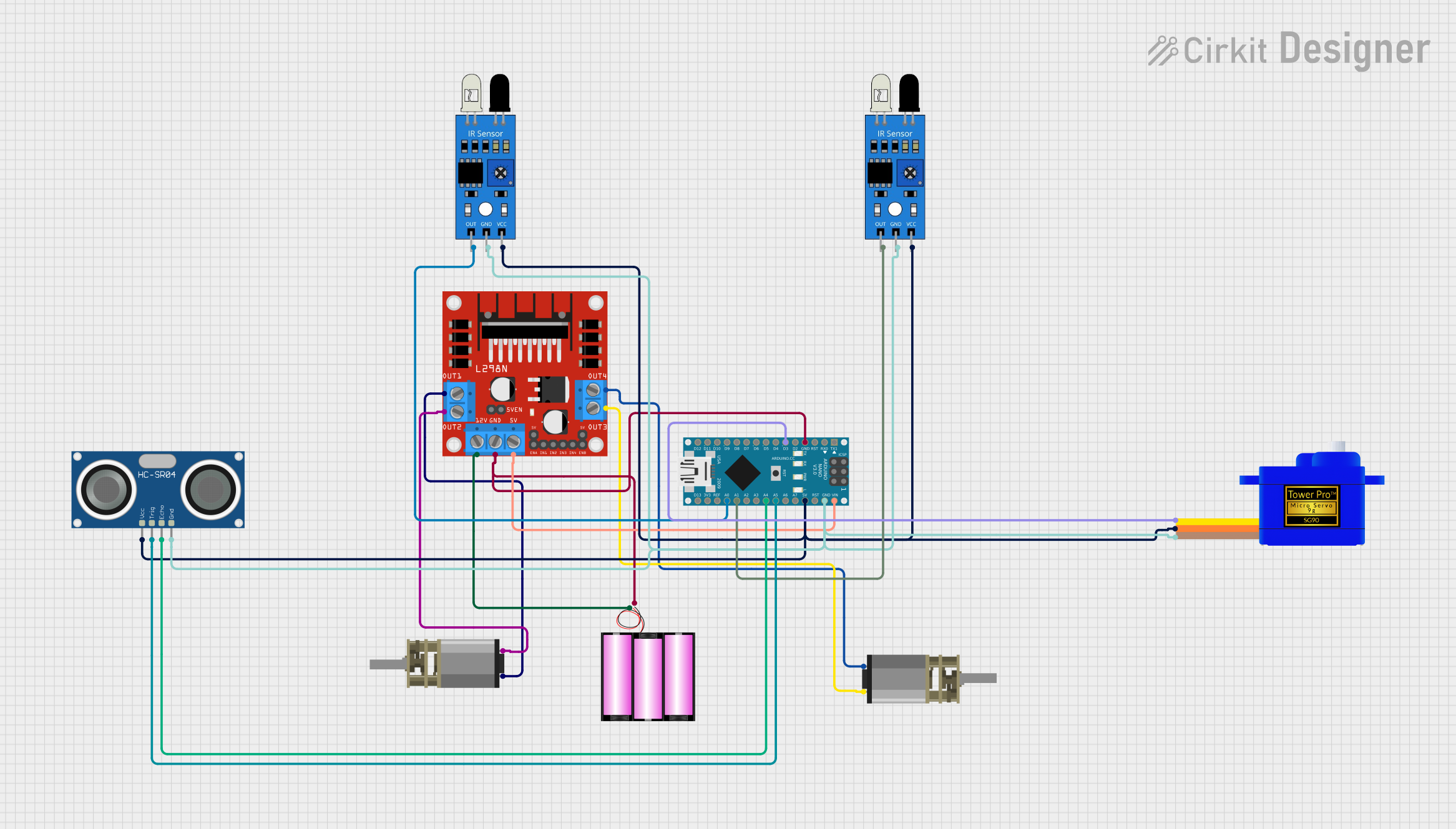
Explore Projects Built with myRIO
Common Applications and Use Cases
- Robotics and automated systems
- Data acquisition and signal processing
- Rapid prototyping of control systems
- Teaching and research in engineering and science
- Custom embedded system development
Technical Specifications
Key Technical Details
- Processor: ARM Cortex-A9 dual-core CPU
- FPGA: Xilinx Zynq-7010
- Memory: 256 MB DDR3 RAM, 512 MB onboard storage
- Operating System: NI Linux Real-Time
- Power Ratings: 6V to 16V DC input
Pin Configuration and Descriptions
| Pin Number | Description | Voltage | Current |
|---|---|---|---|
| 1 | Analog Input 0 | 0-5 V | - |
| 2 | Analog Input 1 | 0-5 V | - |
| ... | ... | ... | ... |
| 10 | Digital I/O 0 | 0-3.3 V | 2-8 mA |
| 11 | Digital I/O 1 | 0-3.3 V | 2-8 mA |
| ... | ... | ... | ... |
| 20 | Ground | - | - |
| 21 | Power Supply Input | 6-16 V | - |
| ... | ... | ... | ... |
Note: This is a simplified representation. Refer to the myRIO User Manual for the complete pinout and specifications.
Usage Instructions
How to Use the Component in a Circuit
- Powering the Device: Connect a DC power supply within the specified voltage range to the power input pins.
- Connecting I/O: Attach sensors, actuators, or other peripherals to the appropriate analog or digital I/O pins.
- Programming the Device: Use NI LabVIEW software to develop programs for the real-time processor and the FPGA.
- Deploying the Application: Transfer the LabVIEW code to the myRIO device and run it to interact with the connected I/O.
Important Considerations and Best Practices
- Ensure that all connected peripherals are compatible with the voltage and current specifications of the myRIO I/O pins.
- Use proper anti-static precautions when handling the myRIO to prevent damage to the sensitive electronics.
- Regularly update the firmware and software tools to the latest versions for optimal performance and compatibility.
Troubleshooting and FAQs
Common Issues Users Might Face
- Power Issues: If the myRIO does not power on, check the power supply and connections.
- I/O Not Responding: Verify that the I/O pins are configured correctly in the LabVIEW project.
- Software Deployment Errors: Ensure that the myRIO and the computer are on the same network and that the correct device is selected in LabVIEW.
Solutions and Tips for Troubleshooting
- Power LED Not Lit: Confirm that the power supply is within the specified range and properly connected.
- Unresponsive I/O: Check for loose connections and review the LabVIEW code for proper I/O initialization.
- Deployment Issues: Disable firewalls or antivirus software that may be blocking communication between the computer and the myRIO.
FAQs
Q: Can I use the myRIO without LabVIEW? A: While LabVIEW is the primary development environment for myRIO, it is possible to use other tools and languages that support the ARM processor and FPGA.
Q: What is the maximum sampling rate for analog inputs? A: The maximum sampling rate depends on the configuration and number of channels used. Refer to the myRIO specifications for detailed information.
Q: How do I update the firmware on myRIO? A: Firmware updates can be performed using the NI MAX (Measurement & Automation Explorer) software.
For further assistance, consult the myRIO User Manual or contact National Instruments support.
Note: This documentation is a general guide and may not cover all aspects of the myRIO device. For comprehensive information, always refer to the official documentation provided by National Instruments.