How to Use MPU6050 Accelerometer + Gyroscope (Wokwi Compatible): Examples, Pinouts, and Specs
Introduction
The MPU6050 is a 6-axis motion tracking device that integrates a 3-axis accelerometer and a 3-axis gyroscope into a single compact package. It is widely used for measuring orientation, acceleration, and angular velocity in various applications such as robotics, drones, gaming devices, and motion tracking systems. Its compatibility with the Wokwi simulation platform makes it an excellent choice for prototyping and learning.
The MPU6050 communicates via the I2C protocol, making it easy to interface with microcontrollers like the Arduino UNO. It also features a Digital Motion Processor (DMP) for advanced motion processing.
Explore Projects Built with MPU6050 Accelerometer + Gyroscope (Wokwi Compatible)
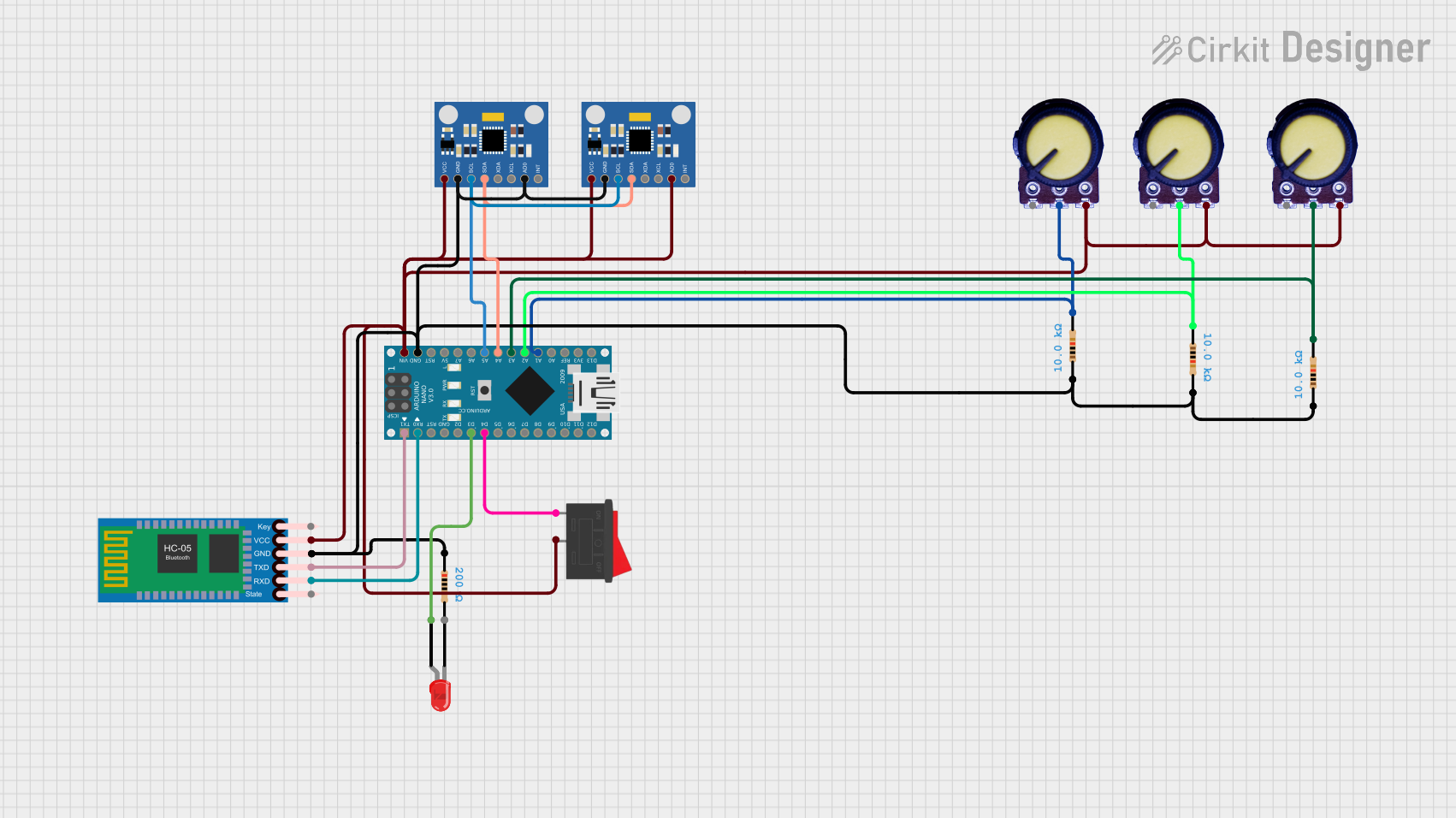
Explore Projects Built with MPU6050 Accelerometer + Gyroscope (Wokwi Compatible)
Technical Specifications
- Supply Voltage: 3.3V to 5V
- Communication Protocol: I2C
- I2C Address: 0x68 (default), 0x69 (if AD0 pin is high)
- Accelerometer Range: ±2g, ±4g, ±8g, ±16g
- Gyroscope Range: ±250°/s, ±500°/s, ±1000°/s, ±2000°/s
- Operating Temperature: -40°C to +85°C
- Power Consumption: 3.9mA (typical)
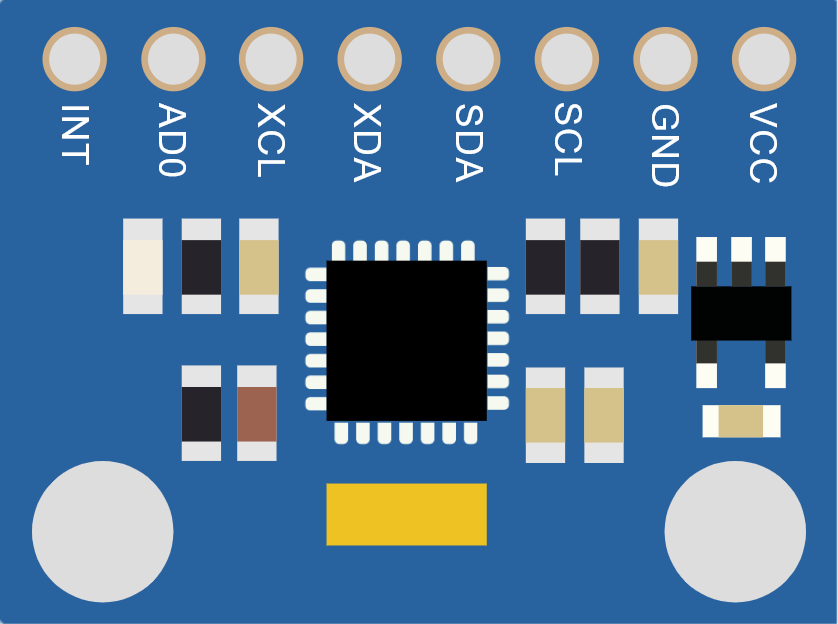
Pin Configuration and Descriptions
| Pin Name | Description |
|---|---|
| VCC | Power supply (3.3V to 5V) |
| GND | Ground |
| SCL | I2C clock line |
| SDA | I2C data line |
| AD0 | I2C address select (low: 0x68, high: 0x69) |
| INT | Interrupt pin (optional, for DMP) |
Usage Instructions
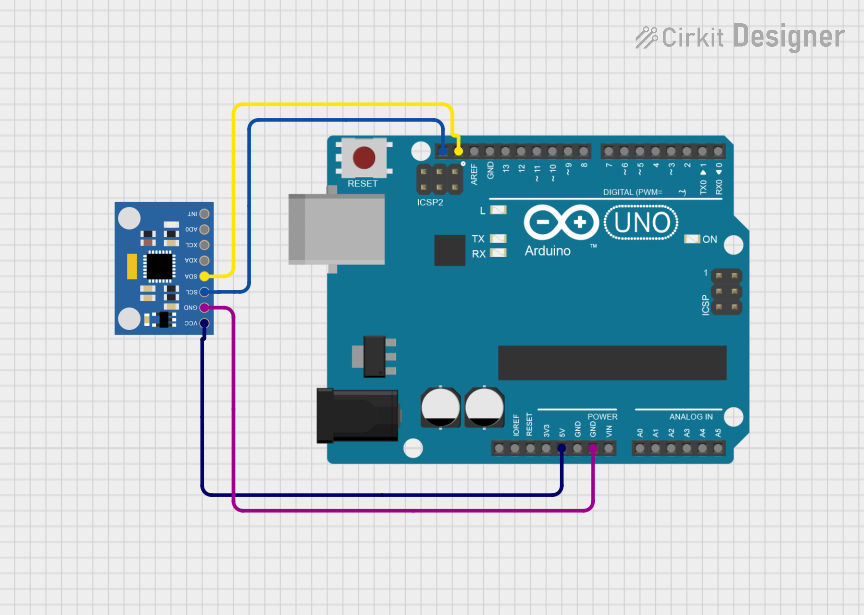
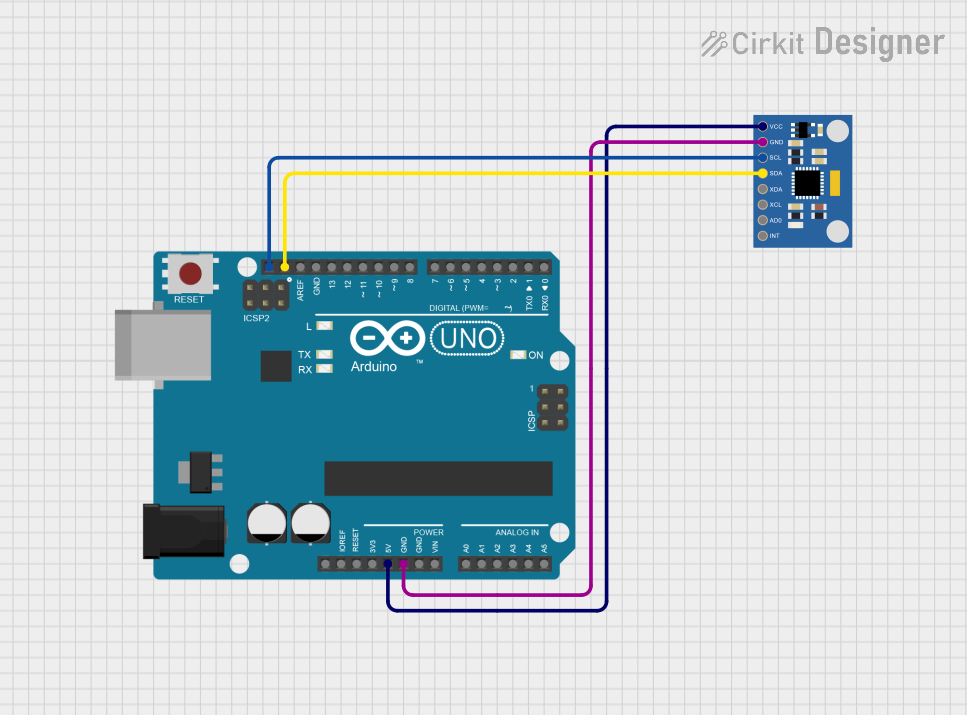
Connecting the MPU6050 to an Arduino UNO
To use the MPU6050 with an Arduino UNO, follow these steps:
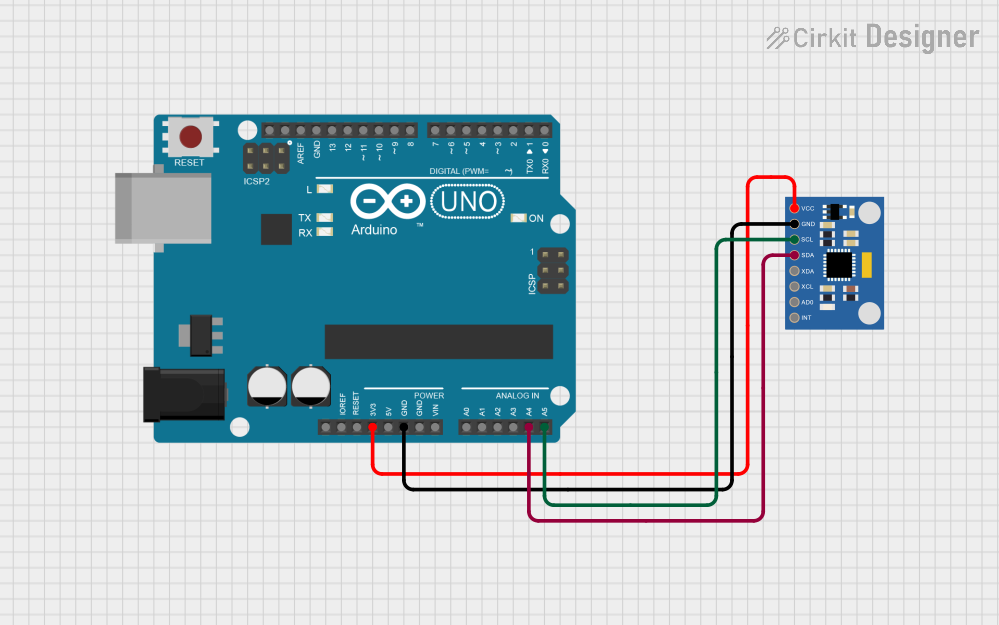
- Connect the VCC pin of the MPU6050 to the 5V pin of the Arduino.
- Connect the GND pin of the MPU6050 to the GND pin of the Arduino.
- Connect the SCL pin of the MPU6050 to the A5 pin of the Arduino (I2C clock line).
- Connect the SDA pin of the MPU6050 to the A4 pin of the Arduino (I2C data line).
- Optionally, connect the INT pin to a digital pin on the Arduino if you plan to use interrupts.
Arduino Code Example
Below is an example code to read accelerometer and gyroscope data from the MPU6050 using the Arduino IDE. This code uses the Wire library for I2C communication.
#include <Wire.h>
// MPU6050 I2C address
const int MPU6050_ADDR = 0x68;
// Registers for accelerometer and gyroscope data
const int ACCEL_XOUT_H = 0x3B;
const int GYRO_XOUT_H = 0x43;
void setup() {
Wire.begin(); // Initialize I2C communication
Serial.begin(9600); // Start serial communication
// Wake up the MPU6050 (set power management register to 0)
Wire.beginTransmission(MPU6050_ADDR);
Wire.write(0x6B); // Power management register
Wire.write(0); // Set to 0 to wake up the sensor
Wire.endTransmission();
}
void loop() {
int16_t accelX, accelY, accelZ;
int16_t gyroX, gyroY, gyroZ;
// Read accelerometer data
accelX = readMPU6050(ACCEL_XOUT_H);
accelY = readMPU6050(ACCEL_XOUT_H + 2);
accelZ = readMPU6050(ACCEL_XOUT_H + 4);
// Read gyroscope data
gyroX = readMPU6050(GYRO_XOUT_H);
gyroY = readMPU6050(GYRO_XOUT_H + 2);
gyroZ = readMPU6050(GYRO_XOUT_H + 4);
// Print data to the Serial Monitor
Serial.print("Accel: ");
Serial.print(accelX); Serial.print(", ");
Serial.print(accelY); Serial.print(", ");
Serial.print(accelZ); Serial.print(" | ");
Serial.print("Gyro: ");
Serial.print(gyroX); Serial.print(", ");
Serial.print(gyroY); Serial.print(", ");
Serial.println(gyroZ);
delay(500); // Delay for readability
}
// Function to read 16-bit data from MPU6050
int16_t readMPU6050(int reg) {
Wire.beginTransmission(MPU6050_ADDR);
Wire.write(reg); // Specify the register to read from
Wire.endTransmission(false);
Wire.requestFrom(MPU6050_ADDR, 2, true); // Request 2 bytes of data
int16_t data = Wire.read() << 8 | Wire.read(); // Combine high and low bytes
return data;
}
Important Considerations
- Ensure proper pull-up resistors (4.7kΩ to 10kΩ) are connected to the SCL and SDA lines if not already present on the module.
- The MPU6050 operates at 3.3V logic levels, but it is 5V tolerant, making it compatible with 5V systems like the Arduino UNO.
- Use libraries like
MPU6050orMPU6050_DMP6for advanced features like DMP processing.
Troubleshooting and FAQs
Common Issues
No data or incorrect readings:
- Ensure the wiring is correct and matches the pin configuration.
- Verify that the I2C address (default: 0x68) is correct in the code.
- Check for loose connections or damaged wires.
Device not detected:
- Use an I2C scanner sketch to confirm the MPU6050 is detected on the I2C bus.
- Ensure the AD0 pin is set correctly for the desired I2C address.
Unstable or noisy readings:
- Use proper decoupling capacitors near the power pins.
- Implement software filtering or use the DMP for more stable data.
FAQs
Q: Can I use the MPU6050 with a 3.3V microcontroller?
A: Yes, the MPU6050 operates at 3.3V logic levels and can be powered with 3.3V.
Q: How do I change the accelerometer or gyroscope range?
A: Modify the appropriate configuration registers (0x1C for accelerometer, 0x1B for gyroscope) in your code.
Q: Is the MPU6050 compatible with Wokwi?
A: Yes, the MPU6050 is fully compatible with the Wokwi simulation platform, allowing for easy prototyping and testing.