How to Use Motor 3600 1800kv: Examples, Pinouts, and Specs

Introduction
The Motor 3600 1800kv is a high-performance brushless motor designed for applications requiring high speed, efficiency, and reliability. Manufactured by Motor, this motor is ideal for use in drones, RC vehicles, and other high-speed applications. Its KV rating of 1800 indicates that it spins at 1800 revolutions per minute (RPM) per volt applied, making it suitable for projects demanding precision and power.
Explore Projects Built with Motor 3600 1800kv


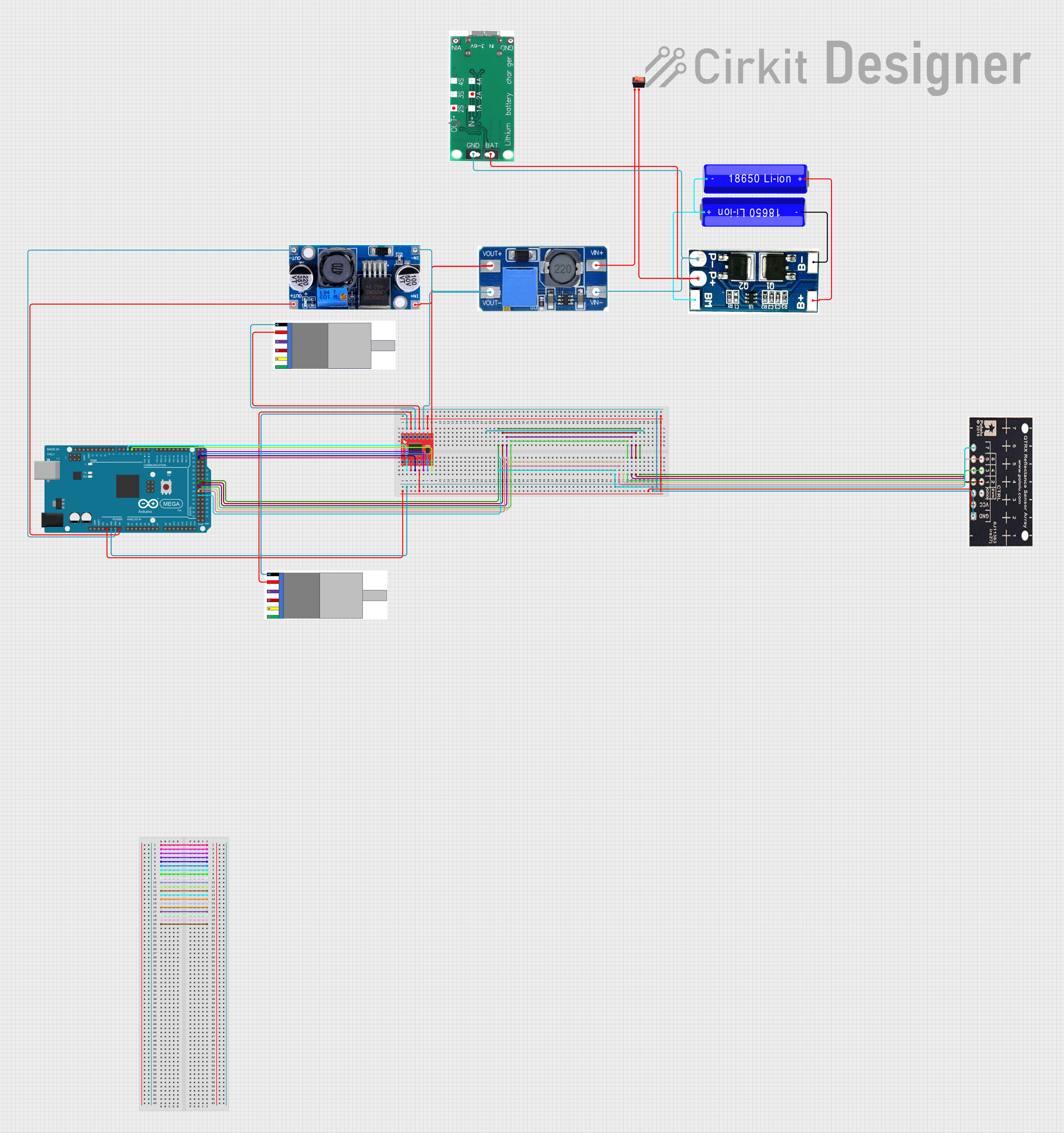
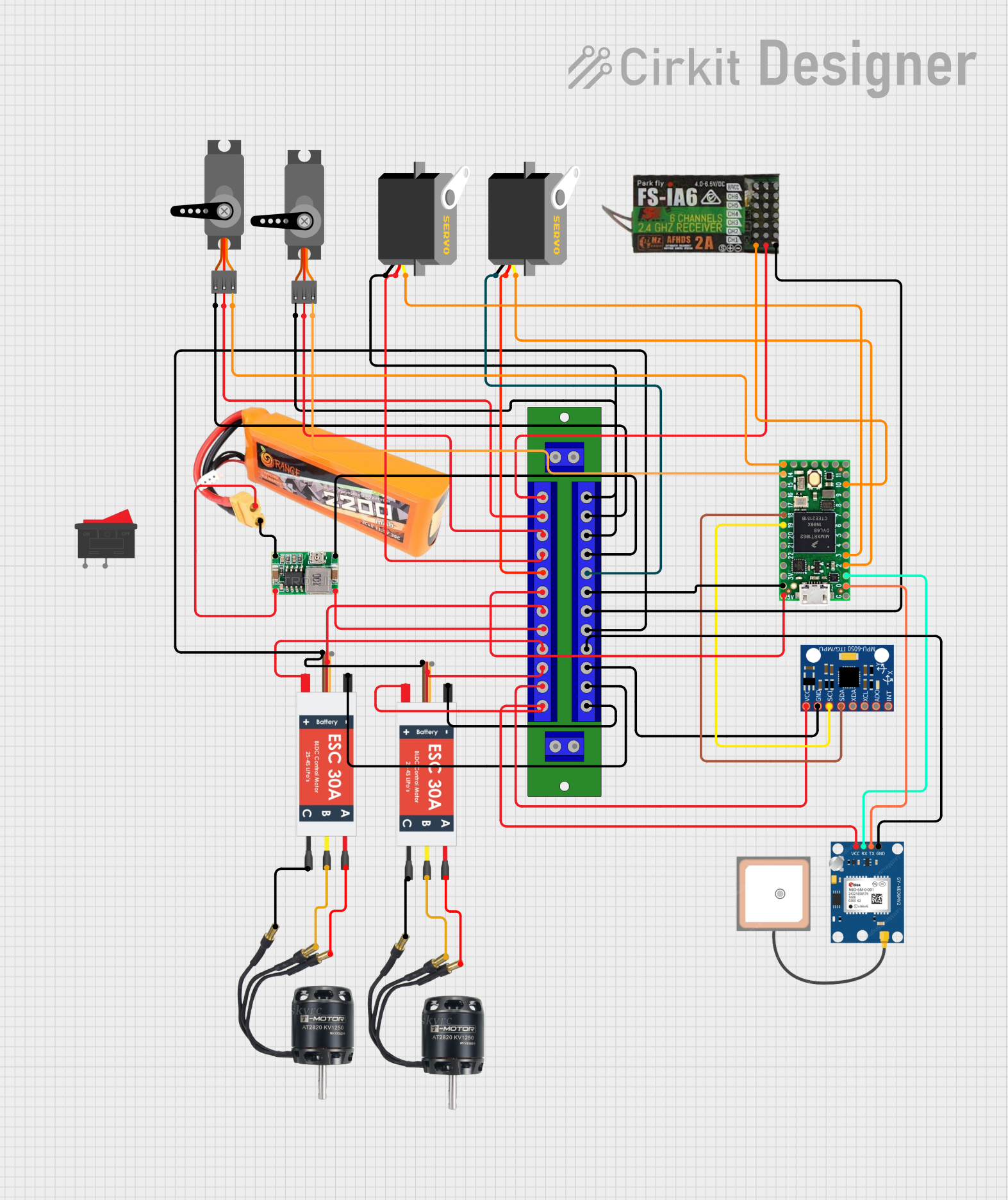
Explore Projects Built with Motor 3600 1800kv
Common Applications:
- Drones and quadcopters
- Remote-controlled (RC) cars, boats, and planes
- Robotics requiring high-speed motors
- DIY projects involving high-efficiency brushless motors
Technical Specifications
Below are the key technical details for the Motor 3600 1800kv:
| Parameter | Value |
|---|---|
| Manufacturer | Motor |
| Part ID | Motor 3600 1800kv |
| Motor Type | Brushless DC (BLDC) |
| KV Rating | 1800 KV |
| Maximum RPM | 3600 RPM |
| Operating Voltage Range | 7.4V - 22.2V (2S to 6S LiPo) |
| Maximum Current | 35A |
| Power Output | Up to 700W |
| Shaft Diameter | 5mm |
| Motor Dimensions | 28mm x 36mm |
| Weight | 75g |
| Mounting Hole Pattern | 16mm x 19mm |
| Connector Type | 3.5mm bullet connectors |
Pin Configuration and Descriptions
The Motor 3600 1800kv has three wires for connection to an electronic speed controller (ESC). These wires are color-coded for easy identification:
| Wire Color | Description |
|---|---|
| Yellow | Phase A (connect to ESC output A) |
| Blue | Phase B (connect to ESC output B) |
| Green | Phase C (connect to ESC output C) |
Note: The motor does not have a built-in sensor, so it operates as a sensorless brushless motor.
Usage Instructions
How to Use the Motor in a Circuit
- Connect to an ESC: The motor must be connected to an electronic speed controller (ESC) that matches its voltage and current ratings. Use the 3.5mm bullet connectors to attach the motor wires to the ESC outputs (A, B, and C).
- Power Supply: Use a LiPo battery within the operating voltage range (7.4V to 22.2V). Ensure the battery can supply sufficient current (at least 35A) for optimal performance.
- Control Signal: The ESC should be connected to a microcontroller (e.g., Arduino UNO) or RC receiver to provide the PWM signal for speed control.
- Mounting: Secure the motor using the mounting holes (16mm x 19mm pattern) and ensure proper alignment to avoid vibrations.
- Propeller Installation: If using the motor for drones or RC planes, attach a compatible propeller to the motor shaft. Ensure the propeller is balanced to prevent damage.
Important Considerations and Best Practices
- Cooling: Ensure adequate airflow around the motor to prevent overheating during operation.
- ESC Compatibility: Use an ESC that supports sensorless brushless motors and matches the motor's current and voltage ratings.
- Reverse Direction: To reverse the motor's rotation, swap any two of the three motor wires connected to the ESC.
- Safety: Always disconnect the power supply when making adjustments to the motor or ESC.
Example: Using the Motor with an Arduino UNO
Below is an example of controlling the motor using an Arduino UNO and an ESC:
// Example code to control Motor 3600 1800kv using Arduino UNO and ESC
#include <Servo.h> // Include Servo library to generate PWM signal
Servo esc; // Create a Servo object to control the ESC
void setup() {
esc.attach(9); // Connect ESC signal wire to Arduino pin 9
esc.writeMicroseconds(1000); // Send minimum throttle signal to arm the ESC
delay(2000); // Wait for ESC to initialize
}
void loop() {
esc.writeMicroseconds(1500); // Set throttle to 50% (adjust value as needed)
delay(5000); // Run motor for 5 seconds
esc.writeMicroseconds(1000); // Stop the motor
delay(2000); // Wait for 2 seconds before restarting
}
Note: Ensure the ESC is properly armed before running the motor. Refer to the ESC's manual for specific arming procedures.
Troubleshooting and FAQs
Common Issues and Solutions
Motor Does Not Spin
- Cause: Incorrect wiring or ESC not armed.
- Solution: Verify the motor wires are correctly connected to the ESC. Ensure the ESC is armed and receiving a valid PWM signal.
Motor Spins in the Wrong Direction
- Cause: Incorrect phase wire connections.
- Solution: Swap any two of the three motor wires connected to the ESC.
Motor Overheats
- Cause: Insufficient cooling or overloading.
- Solution: Ensure proper airflow around the motor and avoid exceeding the maximum current rating (35A).
Vibrations During Operation
- Cause: Unbalanced propeller or improper mounting.
- Solution: Balance the propeller and ensure the motor is securely mounted.
FAQs
Q: Can this motor be used with a 3S LiPo battery?
- A: Yes, the motor supports 3S LiPo batteries (11.1V) within its operating voltage range.
Q: Is this motor waterproof?
- A: No, the motor is not waterproof. Avoid exposing it to water or moisture.
Q: What is the maximum propeller size for this motor?
- A: The maximum propeller size depends on the application and power requirements. Refer to the ESC and propeller manufacturer's recommendations.
Q: Can I use this motor with a brushed ESC?
- A: No, this motor requires a brushless ESC for proper operation.
By following this documentation, users can effectively integrate the Motor 3600 1800kv into their projects and achieve optimal performance.