How to Use MKE-S10 CNY70 Line Follower Sensor: Examples, Pinouts, and Specs
Introduction
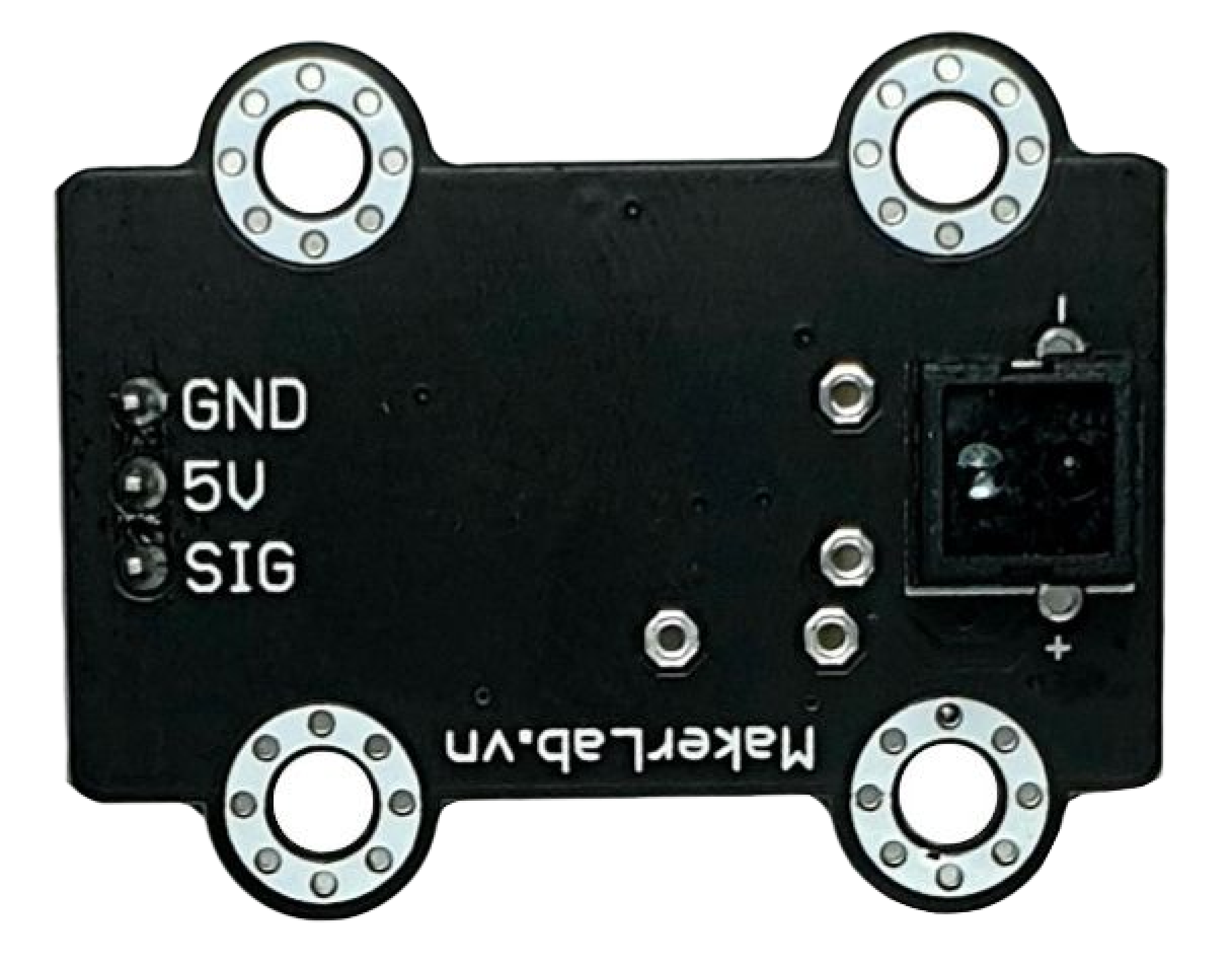
The MKE-S10 CNY70 is a compact line follower sensor designed for robotics and automation applications. It utilizes an infrared LED and a phototransistor to detect the contrast between a line (typically black) and the surrounding surface (typically white). This sensor is widely used in educational robots, maze solvers, and industrial line following vehicles.
Explore Projects Built with MKE-S10 CNY70 Line Follower Sensor
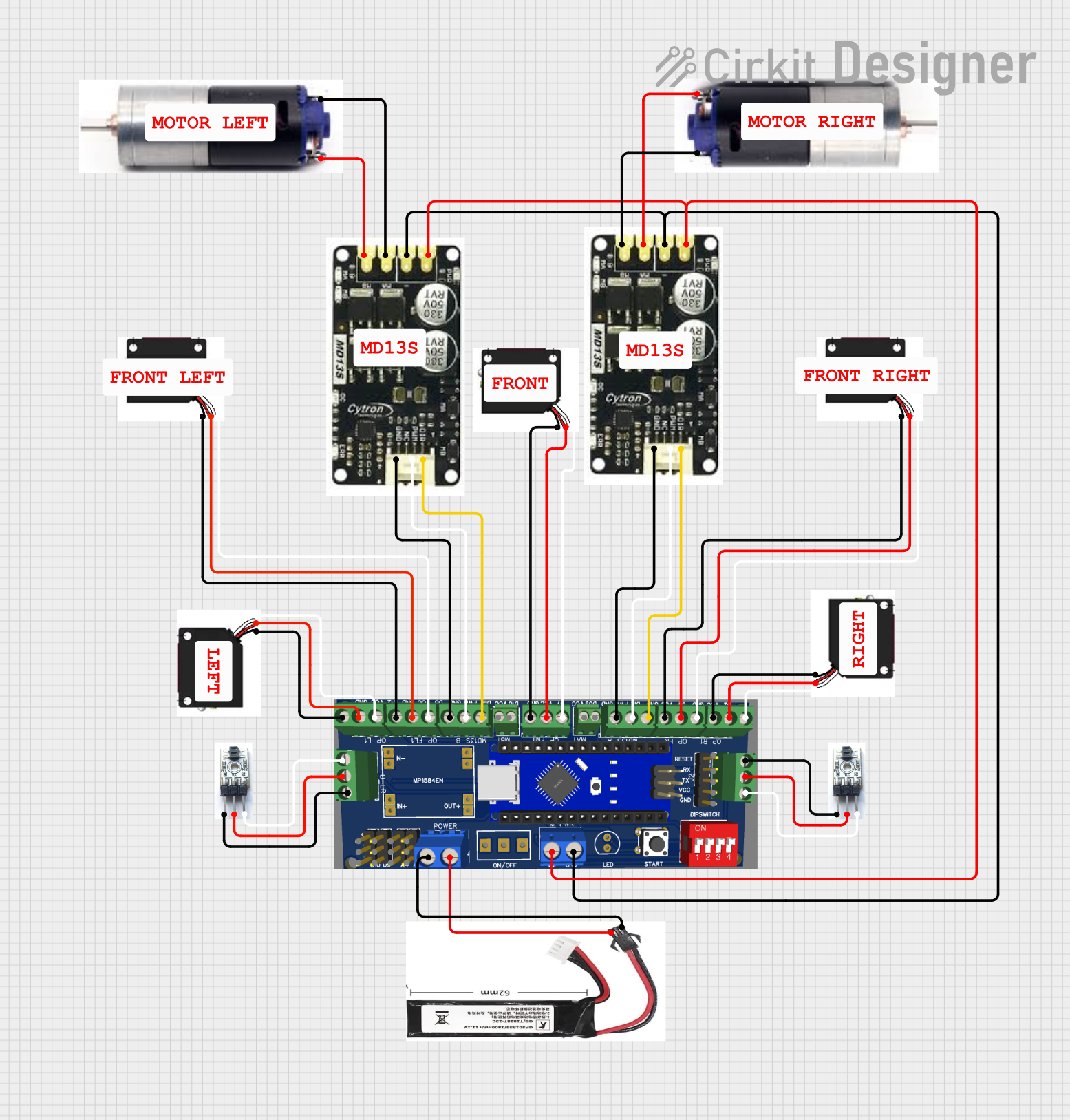
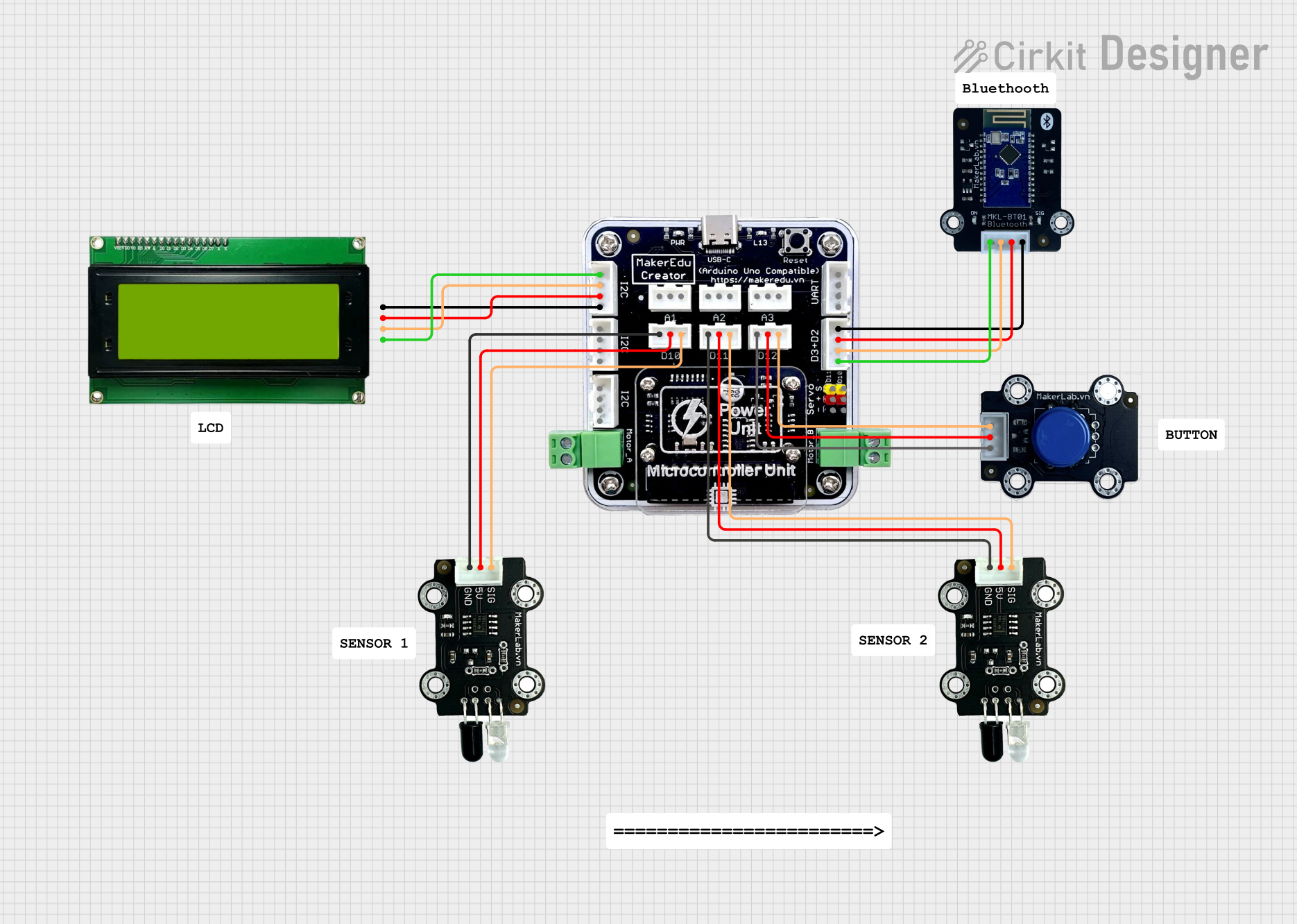


Explore Projects Built with MKE-S10 CNY70 Line Follower Sensor
Common Applications and Use Cases
- Educational robotics kits
- Automated guided vehicles (AGVs)
- Line following robots for competitions
- Position sensing in industrial automation
Technical Specifications
Key Technical Details
- Operating Voltage: 4.5V to 5.5V
- Current Consumption: 50mA (typical)
- Output Type: Analog voltage
- Peak Operating Distance: 0.5mm to 15mm
- Wavelength: 950nm (Infrared)
Pin Configuration and Descriptions
| Pin Number | Name | Description |
|---|---|---|
| 1 | VCC | Power supply (4.5V to 5.5V) |
| 2 | GND | Ground |
| 3 | VO | Analog voltage output relative to surface reflectivity |
Usage Instructions
How to Use the Component in a Circuit
- Power Supply: Connect the VCC pin to a 5V power supply and the GND pin to the ground.
- Output Signal: Connect the VO pin to an analog input on your microcontroller to read the sensor's output.
- Mounting: Position the sensor close to the surface to ensure accurate detection. The recommended distance is within the peak operating range of 0.5mm to 15mm.
Important Considerations and Best Practices
- Surface Contrast: Ensure a high contrast between the line and the surrounding surface for optimal performance.
- Ambient Light: Shield the sensor from direct sunlight and other sources of infrared light to prevent interference.
- Calibration: Calibrate the sensor for the specific surface and line color used in your application.
- Voltage Levels: When interfacing with microcontrollers operating at lower voltages (e.g., 3.3V), use a voltage divider or level shifter for the sensor's output.
Example Code for Arduino UNO
// Define the pin connected to the sensor's output
const int sensorPin = A0;
void setup() {
// Initialize serial communication at 9600 baud rate
Serial.begin(9600);
}
void loop() {
// Read the analog value from the sensor
int sensorValue = analogRead(sensorPin);
// Convert the analog value to a voltage (0-5V)
float voltage = sensorValue * (5.0 / 1023.0);
// Print the voltage to the Serial Monitor
Serial.println(voltage);
// Delay for a short period to avoid spamming the Serial Monitor
delay(100);
}
Troubleshooting and FAQs
Common Issues Users Might Face
- Inconsistent Readings: If the sensor provides inconsistent readings, check for proper alignment and distance from the surface. Also, verify that the surface contrast is sufficient.
- No Output: Ensure that the sensor is correctly powered and that all connections are secure. Check the VCC and GND pins for proper voltage levels.
- Interference from Ambient Light: If ambient light is affecting the sensor's performance, try adding a physical shield around the sensor to block out extraneous light.
Solutions and Tips for Troubleshooting
- Calibration: Adjust the threshold in your code to match the specific reflectivity of the line and surface.
- Wiring Check: Double-check all connections, especially if the sensor is not responding or behaving erratically.
- Sensor Cleaning: Keep the sensor clean and free from dust or debris that could obstruct the infrared signal.
FAQs
Q: Can the MKE-S10 CNY70 sensor detect colors other than black and white? A: The sensor is designed to detect reflectivity differences. While optimized for black and white, it can detect other colors if there is sufficient contrast.
Q: What is the maximum operating distance of the sensor? A: The sensor operates best within a range of 0.5mm to 15mm from the surface.
Q: How can I adjust the sensitivity of the sensor? A: Sensitivity can be adjusted by calibrating the threshold value in your code based on the analog voltage readings from the sensor.
Q: Is it possible to use multiple MKE-S10 CNY70 sensors on a single robot? A: Yes, you can use multiple sensors to improve line detection and navigation accuracy. Ensure each sensor is connected to a separate analog input pin on your microcontroller.