How to Use MPU6050 Accelerometer + Gyroscope: Examples, Pinouts, and Specs
Introduction
The MPU6050 is a 6-axis motion tracking device that combines a 3-axis accelerometer and a 3-axis gyroscope on a single chip. This compact and versatile sensor is widely used for applications requiring precise motion tracking and orientation detection. It communicates via the I2C protocol, making it easy to interface with microcontrollers like Arduino, Raspberry Pi, and other embedded systems.
Explore Projects Built with MPU6050 Accelerometer + Gyroscope
Explore Projects Built with MPU6050 Accelerometer + Gyroscope
Common Applications and Use Cases
- Robotics for motion and orientation tracking
- Drones and UAVs for stabilization and navigation
- Gaming controllers for motion sensing
- Wearable devices for activity monitoring
- Gesture-based control systems
Technical Specifications
Key Technical Details
- Supply Voltage: 2.375V to 3.46V (3.3V recommended)
- Logic Voltage: 3.3V (compatible with 5V logic via pull-up resistors)
- Communication Protocol: I2C (default address: 0x68, configurable to 0x69)
- Accelerometer Range: ±2g, ±4g, ±8g, ±16g (configurable)
- Gyroscope Range: ±250°/s, ±500°/s, ±1000°/s, ±2000°/s (configurable)
- Operating Temperature: -40°C to +85°C
- Power Consumption: 3.9mA (typical in active mode)
- Built-in Digital Motion Processor (DMP): For sensor fusion and motion processing
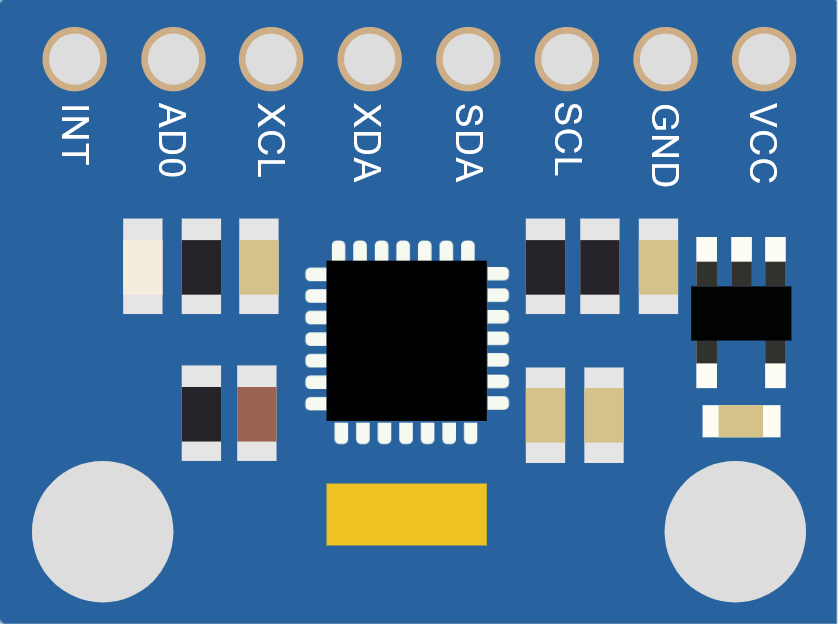
Pin Configuration and Descriptions
| Pin | Name | Description |
|---|---|---|
| 1 | VCC | Power supply input (2.375V to 3.46V, typically 3.3V). |
| 2 | GND | Ground connection. |
| 3 | SCL | I2C clock line. Connect to the microcontroller's SCL pin. |
| 4 | SDA | I2C data line. Connect to the microcontroller's SDA pin. |
| 5 | XDA | Auxiliary I2C data line (used for connecting additional sensors, optional). |
| 6 | XCL | Auxiliary I2C clock line (used for connecting additional sensors, optional). |
| 7 | AD0 | I2C address select pin (connect to GND for 0x68, or VCC for 0x69). |
| 8 | INT | Interrupt pin (used for signaling data availability or events, optional). |
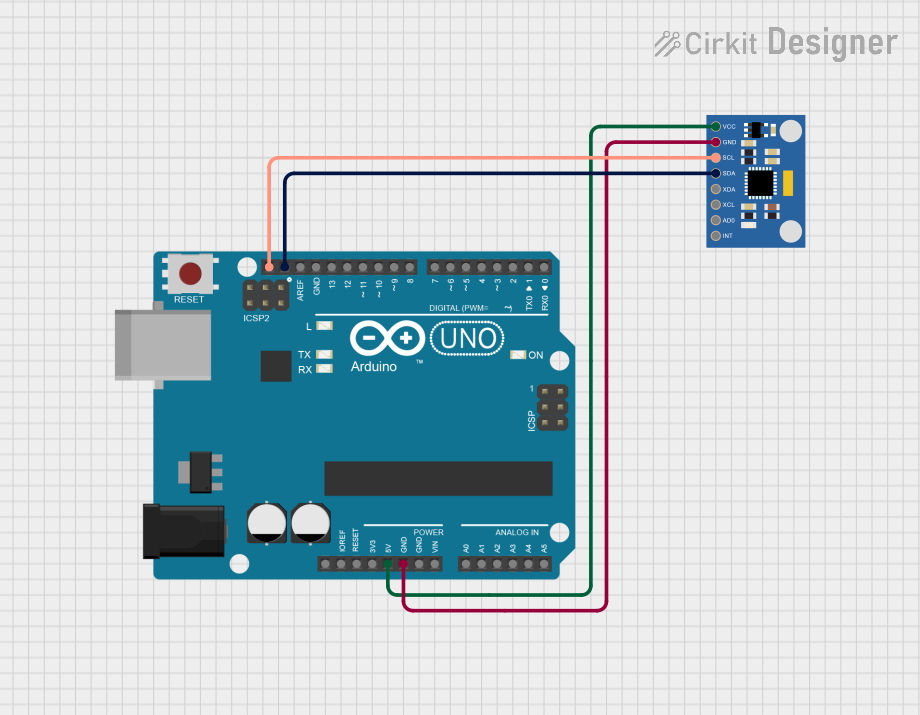
Usage Instructions
How to Use the MPU6050 in a Circuit
- Power the Sensor: Connect the VCC pin to a 3.3V power source and GND to ground.
- I2C Communication: Connect the SDA and SCL pins to the corresponding I2C pins on your microcontroller. Use pull-up resistors (typically 4.7kΩ) if not already present on your board.
- Address Selection: Set the AD0 pin to GND for the default I2C address (0x68) or to VCC for the alternate address (0x69).
- Interrupt Pin (Optional): Connect the INT pin to a digital input pin on your microcontroller if you want to use interrupt-based data reading.
Important Considerations and Best Practices
- Voltage Compatibility: Ensure the microcontroller's I2C pins are compatible with the MPU6050's 3.3V logic level. Use a level shifter if necessary.
- Bypass Capacitor: Place a 0.1µF decoupling capacitor close to the VCC and GND pins to reduce noise.
- Mounting Orientation: Mount the sensor securely and in the correct orientation for accurate readings.
- Calibration: Perform accelerometer and gyroscope calibration to improve accuracy and reduce drift.
Example Code for Arduino UNO
Below is an example of how to interface the MPU6050 with an Arduino UNO to read accelerometer and gyroscope data.
#include <Wire.h>
#include <MPU6050.h>
// Create an MPU6050 object
MPU6050 mpu;
// Variables to store sensor data
int16_t ax, ay, az; // Accelerometer data
int16_t gx, gy, gz; // Gyroscope data
void setup() {
Wire.begin(); // Initialize I2C communication
Serial.begin(9600); // Start serial communication for debugging
// Initialize the MPU6050
Serial.println("Initializing MPU6050...");
if (!mpu.begin(MPU6050_SCALE_2000DPS, MPU6050_RANGE_2G)) {
Serial.println("Could not find a valid MPU6050 sensor. Check connections.");
while (1); // Halt the program if initialization fails
}
Serial.println("MPU6050 initialized successfully!");
}
void loop() {
// Read accelerometer and gyroscope data
mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
// Print the data to the Serial Monitor
Serial.print("Accel: ");
Serial.print("X="); Serial.print(ax);
Serial.print(" Y="); Serial.print(ay);
Serial.print(" Z="); Serial.print(az);
Serial.print(" | Gyro: ");
Serial.print("X="); Serial.print(gx);
Serial.print(" Y="); Serial.print(gy);
Serial.print(" Z="); Serial.println(gz);
delay(500); // Delay for readability
}
Troubleshooting and FAQs
Common Issues and Solutions
MPU6050 Not Detected:
- Cause: Incorrect wiring or I2C address mismatch.
- Solution: Double-check the connections and ensure the AD0 pin is set correctly for the desired I2C address.
Inaccurate Readings:
- Cause: Lack of calibration or excessive noise.
- Solution: Perform sensor calibration and ensure proper decoupling capacitors are used.
No Data Output:
- Cause: Incorrect initialization or faulty sensor.
- Solution: Verify the initialization code and replace the sensor if necessary.
I2C Communication Errors:
- Cause: Missing pull-up resistors or incorrect voltage levels.
- Solution: Add 4.7kΩ pull-up resistors to the SDA and SCL lines and ensure voltage compatibility.
FAQs
Q: Can the MPU6050 be powered with 5V?
A: No, the MPU6050 operates at 3.3V. Use a voltage regulator or level shifter for 5V systems.Q: How do I reduce drift in gyroscope readings?
A: Use sensor fusion algorithms (e.g., complementary filter or Kalman filter) to combine accelerometer and gyroscope data.Q: Can I connect multiple MPU6050 sensors to the same I2C bus?
A: Yes, but you must configure each sensor with a unique I2C address by setting the AD0 pin differently.Q: What is the maximum I2C clock speed supported?
A: The MPU6050 supports I2C clock speeds up to 400kHz (Fast Mode).