How to Use Speedybee F405 Wing App: Examples, Pinouts, and Specs
Introduction
The Speedybee F405 Wing App (Manufacturer Part ID: SB-F405WING-APP) is a high-performance flight controller designed specifically for racing drones and fixed-wing aircraft. It features advanced processing capabilities, robust connectivity options, and compatibility with popular firmware such as Betaflight and iNav. This component is ideal for drone enthusiasts and professionals seeking precise control, reliable performance, and seamless integration with modern drone systems.
Explore Projects Built with Speedybee F405 Wing App


Explore Projects Built with Speedybee F405 Wing App
Common Applications and Use Cases
- Racing drones for competitive events
- Fixed-wing aircraft for recreational or professional use
- Autonomous drone navigation and control
- FPV (First-Person View) drone setups
- Custom drone builds requiring advanced flight control
Technical Specifications
The Speedybee F405 Wing App is packed with features to ensure optimal performance in demanding applications. Below are the key technical details:
General Specifications
| Parameter | Value |
|---|---|
| Processor | STM32F405 (32-bit ARM Cortex-M4) |
| IMU (Inertial Measurement Unit) | MPU6000 (6-axis gyro and accelerometer) |
| Firmware Compatibility | Betaflight, iNav |
| Input Voltage Range | 7V - 35V (2S-6S LiPo) |
| BEC Output | 5V/2A, 9V/2A |
| UART Ports | 6 |
| Flash Memory | 16MB |
| Dimensions | 36mm x 36mm |
| Mounting Hole Spacing | 30.5mm x 30.5mm (M3 screws) |
| Weight | 8g |
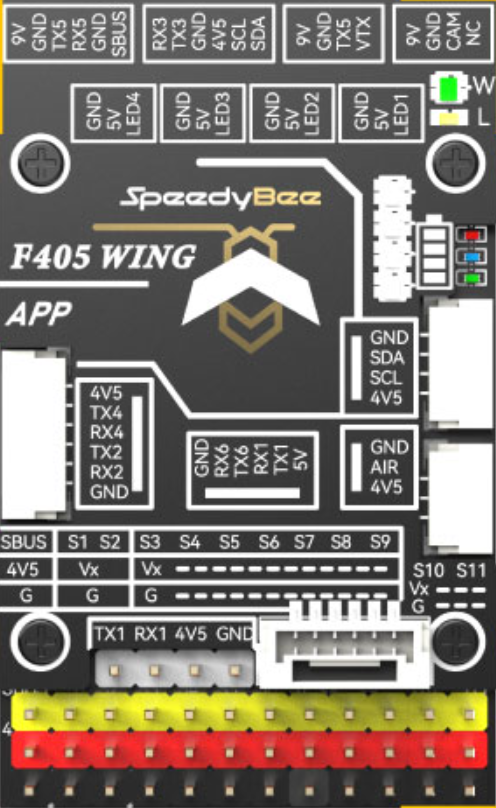
Pin Configuration and Descriptions
The Speedybee F405 Wing App features a well-labeled pinout for easy integration. Below is the pin configuration:
Power and Ground Pins
| Pin Name | Description |
|---|---|
| VBAT | Main power input (7V-35V) |
| GND | Ground connection |
| 5V | 5V output for peripherals |
| 9V | 9V output for peripherals |
Signal and Communication Pins
| Pin Name | Description |
|---|---|
| UART1 | Serial communication port 1 |
| UART2 | Serial communication port 2 |
| UART3 | Serial communication port 3 |
| UART4 | Serial communication port 4 |
| UART5 | Serial communication port 5 |
| UART6 | Serial communication port 6 |
| SCL/SDA | I2C communication pins |
| RXn/TXn | Receiver/Transmitter pins for UART |
Motor and Peripheral Connections
| Pin Name | Description |
|---|---|
| M1-M8 | Motor outputs (PWM/DSHOT) |
| LED | Addressable LED output |
| RSSI | Receiver Signal Strength Input |
| Buzzer | Buzzer output |
Usage Instructions
How to Use the Speedybee F405 Wing App in a Circuit
Powering the Flight Controller:
- Connect a 2S-6S LiPo battery to the VBAT and GND pins.
- Ensure the input voltage is within the 7V-35V range to avoid damage.
Connecting Motors:
- Attach the motor signal wires to the M1-M8 pins.
- Configure the motor protocol (e.g., DSHOT) in the firmware.
Connecting Peripherals:
- Use the UART ports for devices like GPS, telemetry modules, or receivers.
- Connect LEDs to the LED pin for visual feedback.
- Attach a buzzer to the Buzzer pin for audible alerts.
Flashing Firmware:
- Use the Speedybee app or a USB connection to flash compatible firmware (e.g., Betaflight).
- Follow the firmware-specific instructions for configuration.
Calibrating Sensors:
- Perform accelerometer and gyro calibration through the firmware interface.
- Ensure the flight controller is mounted securely to minimize vibrations.
Important Considerations and Best Practices
- Heat Management: Avoid overheating by ensuring proper airflow around the flight controller.
- Wiring: Use high-quality wires and connectors to prevent signal loss or power issues.
- Firmware Updates: Regularly update the firmware to access new features and bug fixes.
- Mounting: Use soft mounting techniques to reduce vibrations and improve sensor accuracy.
Example: Connecting to an Arduino UNO
The Speedybee F405 Wing App can communicate with an Arduino UNO via UART. Below is an example code snippet for reading data from the flight controller:
#include <SoftwareSerial.h>
// Define RX and TX pins for UART communication
SoftwareSerial mySerial(10, 11); // RX = pin 10, TX = pin 11
void setup() {
Serial.begin(9600); // Start serial monitor at 9600 baud
mySerial.begin(115200); // Start UART communication at 115200 baud
Serial.println("Starting communication with Speedybee F405 Wing App...");
}
void loop() {
// Check if data is available from the flight controller
if (mySerial.available()) {
String data = mySerial.readString(); // Read incoming data
Serial.println("Data from flight controller: " + data);
}
// Send a test command to the flight controller
mySerial.println("Test Command");
delay(1000); // Wait 1 second before sending the next command
}
Troubleshooting and FAQs
Common Issues and Solutions
Flight Controller Not Powering On:
- Cause: Incorrect wiring or insufficient voltage.
- Solution: Verify the VBAT and GND connections and ensure the battery voltage is within the 7V-35V range.
Motors Not Spinning:
- Cause: Incorrect motor configuration or protocol mismatch.
- Solution: Check the motor connections and configure the correct protocol (e.g., DSHOT) in the firmware.
No Communication with Firmware:
- Cause: USB driver issues or incorrect UART settings.
- Solution: Install the correct USB drivers and verify the UART port settings in the firmware.
Unstable Flight:
- Cause: Improper sensor calibration or excessive vibrations.
- Solution: Recalibrate the accelerometer and gyro, and ensure the flight controller is securely mounted.
FAQs
Q: Can I use the Speedybee F405 Wing App with iNav firmware?
A: Yes, the flight controller is fully compatible with iNav firmware.Q: What is the maximum number of motors supported?
A: The flight controller supports up to 8 motors.Q: How do I update the firmware?
A: Use the Speedybee app or a USB connection to flash the latest firmware.Q: Can I connect a GPS module?
A: Yes, connect the GPS module to one of the UART ports and configure it in the firmware.
This concludes the documentation for the Speedybee F405 Wing App. For further assistance, refer to the official Speedybee support resources.