How to Use QMC5883L Magnetometer: Examples, Pinouts, and Specs
Introduction
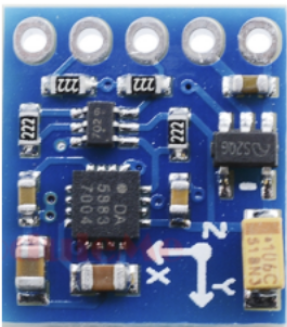
The QMC5883L Magnetometer is a high-precision, 3-axis magnetic sensor capable of measuring magnetic fields in three dimensions. It is widely used in electronic compasses, navigation systems, and for position detection purposes. The component's ability to detect the Earth's magnetic field makes it an essential tool in applications requiring orientation and heading information, such as drones, smartphones, and vehicle navigation systems.
Explore Projects Built with QMC5883L Magnetometer
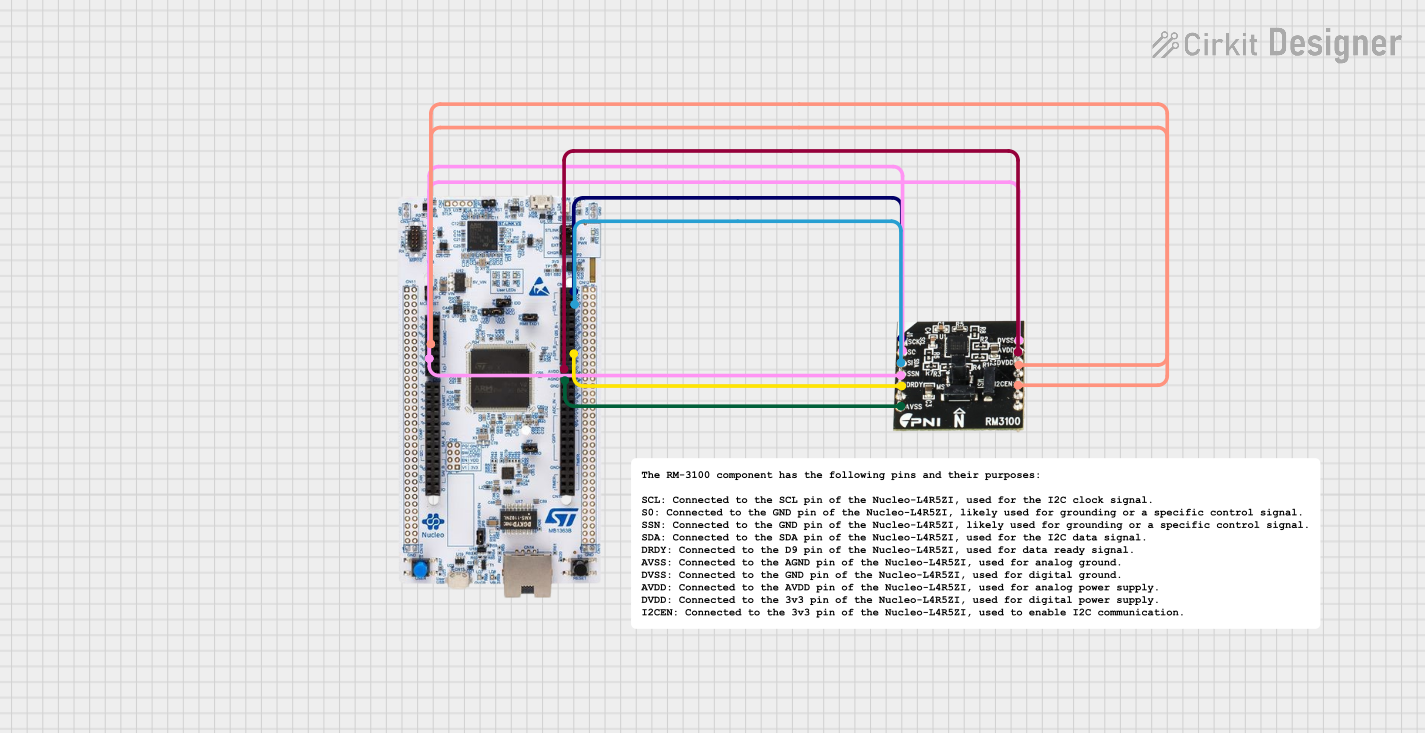
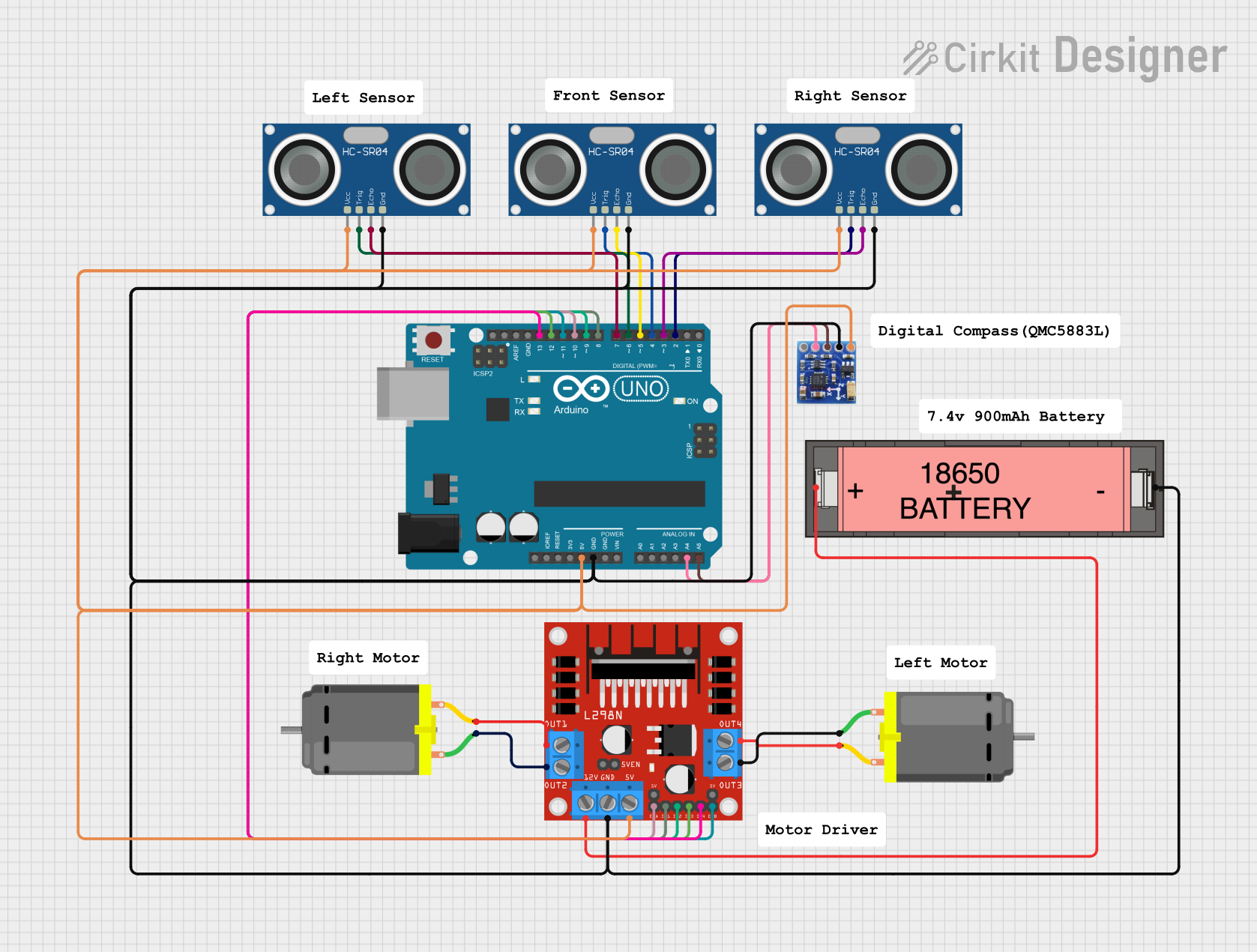
Explore Projects Built with QMC5883L Magnetometer
Technical Specifications
Key Technical Details
- Supply Voltage (Vdd): 2.16V - 3.6V
- Measurement Range: ±8 Gauss
- Resolution: 0.5 mGauss
- Digital Output: I2C interface
- Operating Temperature: -40°C to +85°C
Pin Configuration and Descriptions
| Pin Number | Pin Name | Description |
|---|---|---|
| 1 | VCC | Power supply (2.16V - 3.6V) |
| 2 | GND | Ground |
| 3 | SCL | Serial Clock Line for I2C communication |
| 4 | SDA | Serial Data Line for I2C communication |
| 5 | DRDY | Data Ready, active low interrupt output |
Usage Instructions
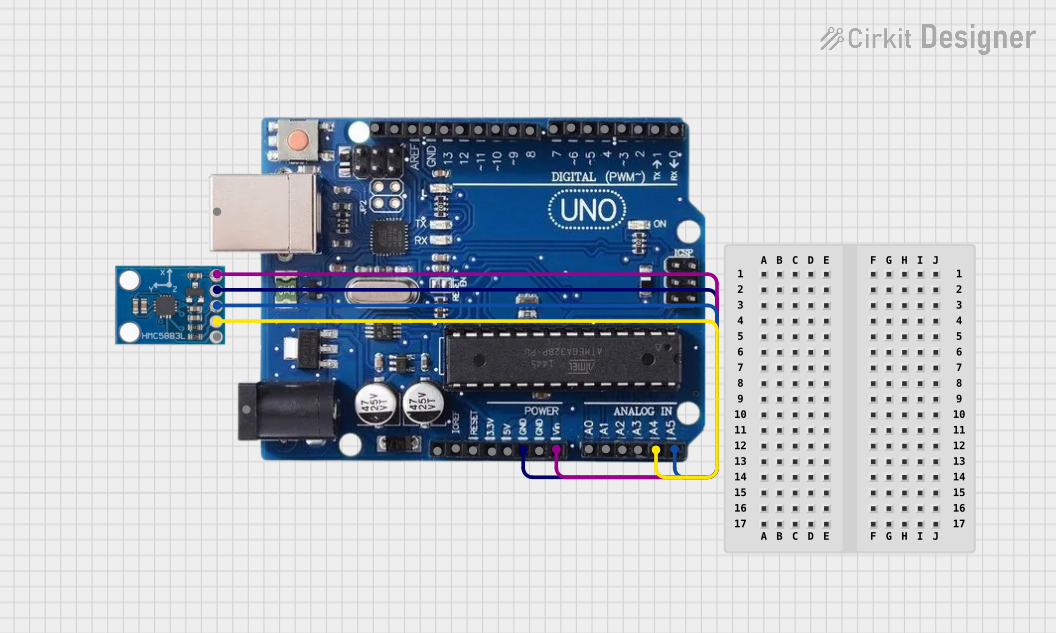
Integration into a Circuit
To use the QMC5883L Magnetometer in a circuit:
- Connect the VCC pin to a power supply within the specified voltage range.
- Connect the GND pin to the ground of the power supply.
- Interface the SCL and SDA pins with the corresponding I2C pins on your microcontroller (e.g., Arduino UNO).
- Optionally, connect the DRDY pin to a digital input on your microcontroller if you wish to use the data ready interrupt feature.
Best Practices
- Ensure that the power supply is stable and within the specified voltage range to prevent damage to the magnetometer.
- Place the QMC5883L away from magnetic materials and electronic components that may generate interference.
- Use pull-up resistors on the SCL and SDA lines for reliable I2C communication.
- Calibrate the magnetometer in the final design to account for any magnetic interference from the surrounding environment.
Example Code for Arduino UNO
#include <Wire.h>
// QMC5883L I2C address
#define QMC5883L_Address 0x0D
// Register addresses
#define X_LSB 0x00
#define MODE_REG 0x09
void setup() {
Wire.begin(); // Initialize I2C
Serial.begin(9600); // Start serial communication at 9600 baud rate
// Set QMC5883L to continuous measurement mode
Wire.beginTransmission(QMC5883L_Address);
Wire.write(MODE_REG);
Wire.write(0x01);
Wire.endTransmission();
}
void loop() {
int x, y, z;
// Read magnetometer values
Wire.beginTransmission(QMC5883L_Address);
Wire.write(X_LSB); // Set pointer to X-axis LSB
Wire.endTransmission();
Wire.requestFrom(QMC5883L_Address, 6); // Request 6 bytes (2 for each axis)
if (6 <= Wire.available()) {
x = Wire.read() | Wire.read() << 8; // X-axis
y = Wire.read() | Wire.read() << 8; // Y-axis
z = Wire.read() | Wire.read() << 8; // Z-axis
}
// Output the results
Serial.print("X: ");
Serial.print(x);
Serial.print(" Y: ");
Serial.print(y);
Serial.print(" Z: ");
Serial.println(z);
delay(100); // Delay for readability
}
Troubleshooting and FAQs
Common Issues
- Inaccurate Readings: Ensure that the magnetometer is calibrated and that there are no nearby magnetic sources causing interference.
- No Data on I2C: Check the connections and pull-up resistors on the SCL and SDA lines. Also, verify that the correct I2C address is being used in the code.
- Intermittent Communication: Ensure that the power supply is stable and that there is no physical damage to the pins or connections.
FAQs
Q: How do I calibrate the QMC5883L Magnetometer? A: Calibration involves rotating the magnetometer in all three axes and recording the maximum and minimum values. These values are then used to offset and scale the raw measurements.
Q: Can the QMC5883L be used near other electronic components? A: While it can be used near other components, care should be taken to minimize interference. Shielding and strategic placement can help reduce the impact of electromagnetic noise.
Q: What is the purpose of the DRDY pin? A: The DRDY (Data Ready) pin is an interrupt that signals when new measurement data is available, allowing for more efficient data retrieval without constant polling.
For further assistance, consult the QMC5883L datasheet or contact technical support.