How to Use MAG3110: Examples, Pinouts, and Specs
Introduction
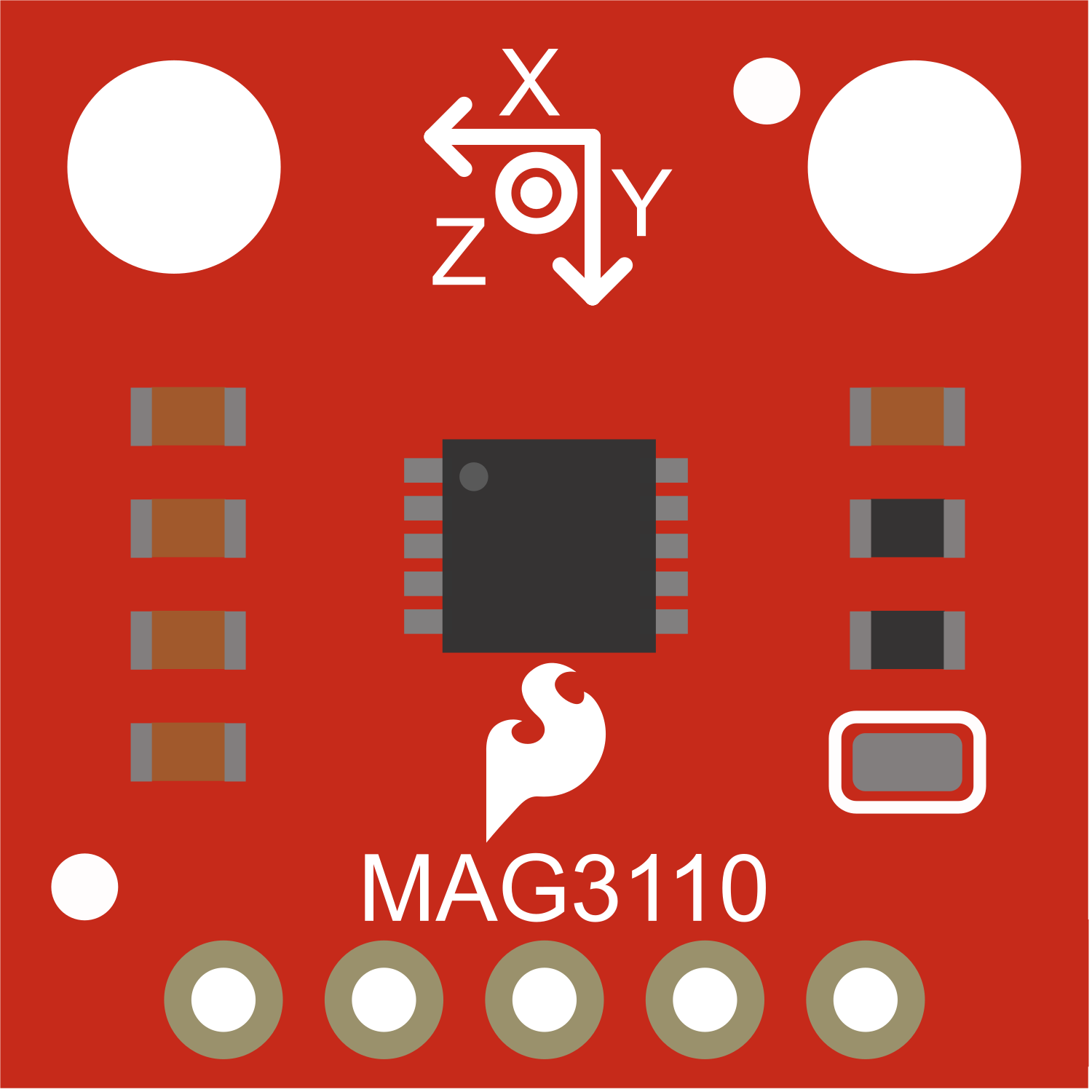
The MAG3110 is a small, low-power, digital 3-axis magnetometer with a wide dynamic range to measure magnetic field data. This sensor can be used for applications such as compass navigation, position tracking, and motion sensing.
Explore Projects Built with MAG3110

Explore Projects Built with MAG3110
Common Applications and Use Cases
- Electronic compasses
- Map rotation in smartphones and tablets
- Position detection in consumer electronics
- Motion detection for gaming and virtual reality input devices
Technical Specifications
Key Technical Details
- Supply Voltage (VDD): 1.95V to 3.6V
- Measurement Range: ±1000 µT
- Sensitivity: 0.1 µT
- Output Data Rate (ODR): 0.133 to 80 Hz
- Interface: I2C, up to 400 kHz
- Operating Temperature: -40°C to +85°C
Pin Configuration and Descriptions
| Pin Number | Name | Description |
|---|---|---|
| 1 | VDD | Power supply voltage |
| 2 | GND | Ground connection |
| 3 | SCL | I2C clock line |
| 4 | SDA | I2C data line |
| 5 | DRDY | Data ready output (active low) |
| 6 | INT | Interrupt output (active low) |
Usage Instructions
How to Use the MAG3110 in a Circuit
- Power Supply: Connect VDD to a 1.95V to 3.6V power source and GND to the ground.
- I2C Communication: Connect SCL and SDA to the I2C clock and data lines, respectively. Ensure pull-up resistors are in place as required for your microcontroller's I2C bus.
- Data Ready (DRDY): Optionally, connect DRDY to a digital input on your microcontroller if you wish to use the data ready feature.
- Interrupt (INT): Optionally, connect INT to a digital input on your microcontroller if you wish to use the interrupt feature.
Important Considerations and Best Practices
- Ensure that the power supply is stable and within the specified voltage range.
- Place the magnetometer away from magnetic interference sources such as speakers and motors.
- Calibrate the magnetometer in the final design to account for any local magnetic distortions.
- Use proper decoupling capacitors close to the power pins of the MAG3110 to filter out noise.
Troubleshooting and FAQs
Common Issues
- No Data on I2C: Check connections and pull-up resistors on the I2C lines. Ensure that the correct I2C address is being used.
- Inaccurate Readings: Verify that the device is calibrated and that there are no nearby magnetic interference sources.
Solutions and Tips for Troubleshooting
- If the MAG3110 is not responding, check the power supply and I2C connections.
- For inaccurate readings, recalibrate the sensor and make sure it is placed in a magnetically clean environment.
FAQs
Q: How do I calibrate the MAG3110? A: Calibration typically involves taking several measurements at known orientations and then using these to correct for offsets and scale factors.
Q: Can the MAG3110 be used for precise navigation? A: While the MAG3110 can be used for basic navigation, its accuracy is subject to environmental factors and may not be suitable for precision navigation without additional sensors and algorithms.
Example Code for Arduino UNO
Below is an example of how to interface the MAG3110 with an Arduino UNO. This code initializes the sensor and reads the magnetic field data.
#include <Wire.h>
// MAG3110 I2C address
#define MAG3110_ADDRESS 0x0E
// Register addresses
#define MAG3110_DR_STATUS 0x00
#define MAG3110_OUT_X_MSB 0x01
#define MAG3110_WHO_AM_I 0x07
#define MAG3110_CTRL_REG1 0x10
void setup() {
Wire.begin(); // Initialize I2C
Serial.begin(9600); // Start serial for output
// Check device ID
if (readRegister(MAG3110_WHO_AM_I) != 0xC4) {
Serial.println("MAG3110 not found");
while (1);
}
// Set up the sensor
writeRegister(MAG3110_CTRL_REG1, 0x01); // Active mode
}
void loop() {
// Check if data is ready
if (readRegister(MAG3110_DR_STATUS) & 0x01) {
int x, y, z;
// Read the magnetometer data
x = readMagData(MAG3110_OUT_X_MSB);
y = readMagData(MAG3110_OUT_X_MSB + 2);
z = readMagData(MAG3110_OUT_X_MSB + 4);
// Print the values
Serial.print("X: "); Serial.print(x); Serial.print(" ");
Serial.print("Y: "); Serial.print(y); Serial.print(" ");
Serial.print("Z: "); Serial.println(z);
}
delay(100); // Wait before reading again
}
// Function to write to a register
void writeRegister(byte reg, byte value) {
Wire.beginTransmission(MAG3110_ADDRESS);
Wire.write(reg);
Wire.write(value);
Wire.endTransmission();
}
// Function to read a byte from a register
byte readRegister(byte reg) {
Wire.beginTransmission(MAG3110_ADDRESS);
Wire.write(reg);
Wire.endTransmission();
Wire.requestFrom(MAG3110_ADDRESS, 1);
return Wire.read();
}
// Function to read two bytes from consecutive registers and combine them
int readMagData(byte reg) {
Wire.beginTransmission(MAG3110_ADDRESS);
Wire.write(reg);
Wire.endTransmission();
Wire.requestFrom(MAG3110_ADDRESS, 2);
int value = Wire.read() << 8;
value |= Wire.read();
return value;
}
This code is a basic starting point for using the MAG3110 with an Arduino. It demonstrates initialization, reading from the sensor, and outputting the data. For a complete application, additional code for calibration and data processing would be necessary.