How to Use QTR8A: Examples, Pinouts, and Specs

Introduction
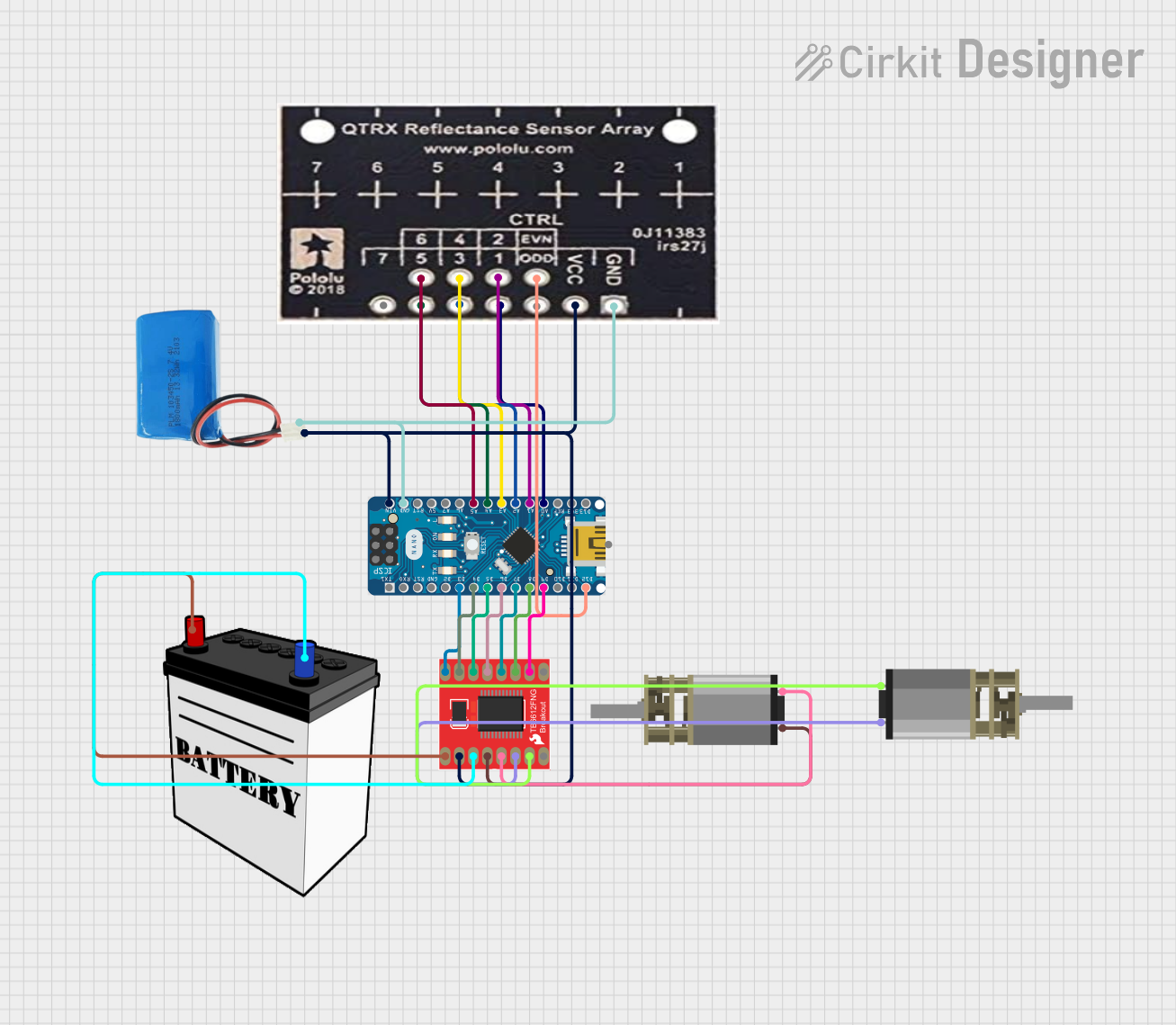
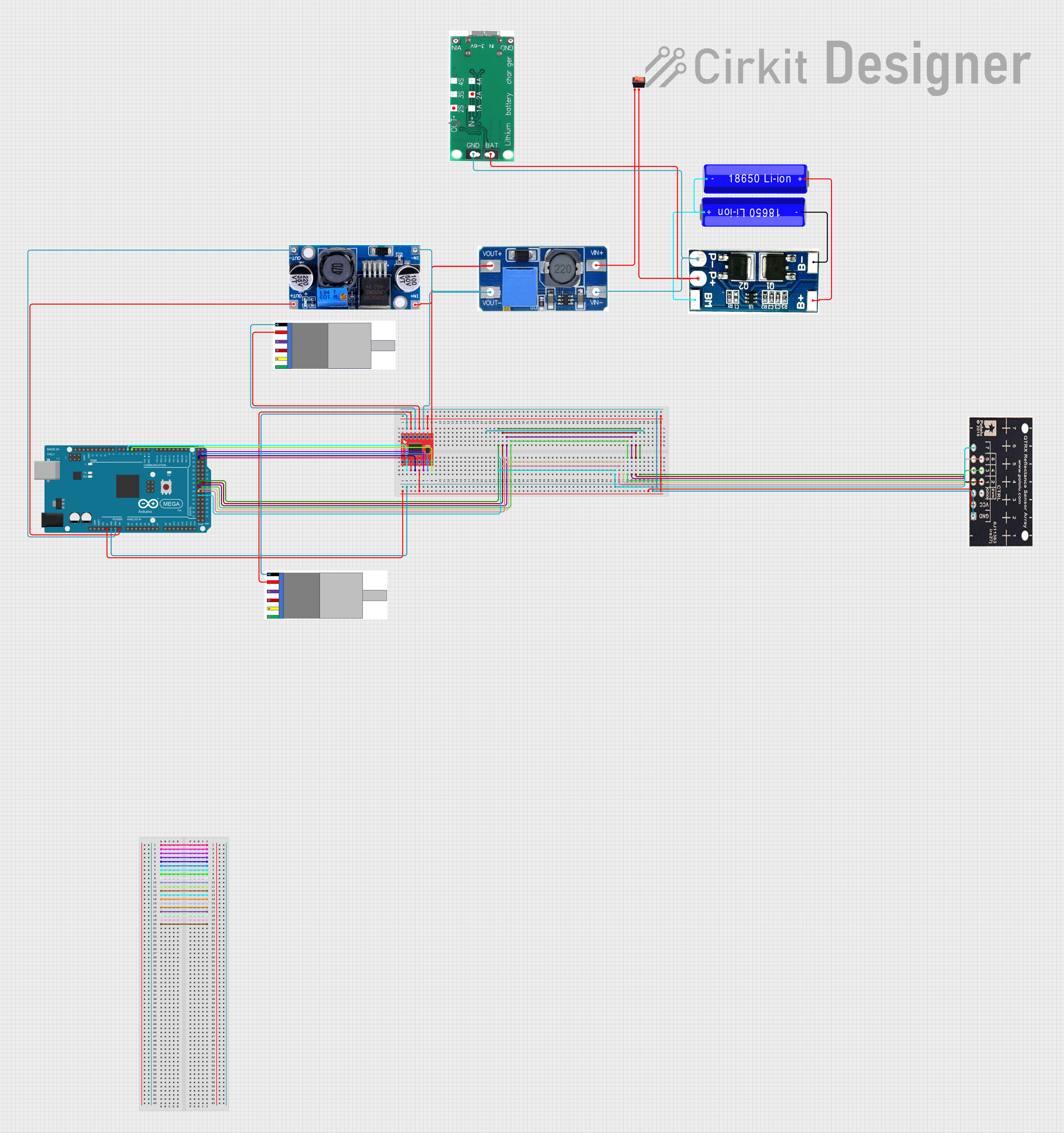
The QTR8A is an 8-channel infrared (IR) reflective sensor array designed for detecting the presence of objects or measuring distances. It features eight pairs of IR emitters and photodetectors arranged in a linear configuration, making it ideal for applications requiring precise tracking or proximity sensing. This sensor array is commonly used in robotics, line-following robots, and automation systems where accurate detection of reflective surfaces or objects is essential.
Explore Projects Built with QTR8A
Explore Projects Built with QTR8A
Common Applications
- Line-following robots
- Edge detection in robotics
- Object tracking and proximity sensing
- Industrial automation systems
- Position sensing in conveyor belts
Technical Specifications
Key Technical Details
- Operating Voltage: 5V DC
- Current Consumption: ~100 mA (all LEDs on)
- Output Type: Analog voltage (0V to 5V per channel)
- Sensor Count: 8 IR emitter-detector pairs
- Detection Range: 3 mm to 30 mm (depending on surface reflectivity)
- Dimensions: 76.2 mm × 12.7 mm × 3.2 mm
- Weight: ~3 g
- Connector Type: 0.1" pitch header pins
Pin Configuration and Descriptions
The QTR8A sensor array has a 10-pin header for interfacing. The pinout is as follows:
| Pin | Name | Description |
|---|---|---|
| 1 | VCC | Power supply input (5V DC). |
| 2 | GND | Ground connection. |
| 3 | OUT1 | Analog output for sensor 1 (leftmost sensor). |
| 4 | OUT2 | Analog output for sensor 2. |
| 5 | OUT3 | Analog output for sensor 3. |
| 6 | OUT4 | Analog output for sensor 4. |
| 7 | OUT5 | Analog output for sensor 5. |
| 8 | OUT6 | Analog output for sensor 6. |
| 9 | OUT7 | Analog output for sensor 7. |
| 10 | OUT8 | Analog output for sensor 8 (rightmost sensor). |
Usage Instructions
How to Use the QTR8A in a Circuit
Powering the Sensor Array:
- Connect the VCC pin to a 5V DC power source.
- Connect the GND pin to the ground of your circuit.
Reading Sensor Outputs:
- Each sensor output (OUT1 to OUT8) provides an analog voltage proportional to the reflectivity of the surface beneath it.
- Use an analog-to-digital converter (ADC) on a microcontroller (e.g., Arduino UNO) to read the sensor values.
Mounting the Sensor:
- Position the QTR8A sensor array approximately 3 mm to 10 mm above the surface for optimal performance.
- Ensure the IR emitters face the surface to be detected.
Interfacing with an Arduino UNO:
- Connect the sensor outputs (OUT1 to OUT8) to the analog input pins (A0 to A7) of the Arduino UNO.
- Use the following sample code to read and display sensor values.
Sample Arduino Code
// QTR8A Sensor Array Example Code
// Reads analog values from the QTR8A sensor array and prints them to the Serial Monitor.
const int sensorPins[8] = {A0, A1, A2, A3, A4, A5, A6, A7}; // Analog pins for sensors
int sensorValues[8]; // Array to store sensor readings
void setup() {
Serial.begin(9600); // Initialize serial communication at 9600 baud
for (int i = 0; i < 8; i++) {
pinMode(sensorPins[i], INPUT); // Set sensor pins as input
}
}
void loop() {
// Read sensor values
for (int i = 0; i < 8; i++) {
sensorValues[i] = analogRead(sensorPins[i]); // Read analog value
}
// Print sensor values to Serial Monitor
for (int i = 0; i < 8; i++) {
Serial.print("Sensor ");
Serial.print(i + 1);
Serial.print(": ");
Serial.print(sensorValues[i]);
Serial.print("\t"); // Tab space for better readability
}
Serial.println(); // New line after printing all sensor values
delay(100); // Short delay for stability
}
Important Considerations and Best Practices
- Surface Reflectivity: The sensor's performance depends on the reflectivity of the surface. Darker surfaces reflect less IR light, resulting in lower output voltages.
- Ambient Light Interference: Minimize ambient IR light interference by shielding the sensor or using it in controlled lighting conditions.
- Sensor Calibration: Calibrate the sensor array for your specific application to improve accuracy. This can involve determining threshold values for detecting lines or objects.
- Power Supply: Ensure a stable 5V power supply to avoid fluctuations in sensor readings.
Troubleshooting and FAQs
Common Issues and Solutions
No Output or Incorrect Readings:
- Cause: Improper power connection.
- Solution: Verify that the VCC and GND pins are correctly connected to a 5V power source and ground.
Inconsistent Sensor Readings:
- Cause: Ambient IR light interference or unstable power supply.
- Solution: Shield the sensor from external IR sources and ensure a stable 5V power supply.
Low Sensitivity to Reflective Surfaces:
- Cause: Sensor height is too high or surface reflectivity is too low.
- Solution: Adjust the sensor height to be within the recommended range (3 mm to 10 mm). Use surfaces with higher reflectivity if possible.
Sensor Outputs All Read Maximum or Minimum Values:
- Cause: Incorrect wiring or damaged sensor.
- Solution: Check the wiring and ensure all connections are secure. If the issue persists, test each sensor individually to identify any damaged components.
FAQs
Q1: Can the QTR8A detect colors?
A1: No, the QTR8A is designed to detect reflectivity, not color. It can differentiate between light and dark surfaces based on their reflectivity.
Q2: What is the maximum distance the QTR8A can detect?
A2: The detection range is typically 3 mm to 30 mm, depending on the reflectivity of the surface.
Q3: Can I use fewer than 8 sensors?
A3: Yes, you can use fewer sensors by connecting only the desired output pins to your microcontroller.
Q4: Is the QTR8A compatible with 3.3V systems?
A4: The QTR8A is designed for 5V operation. To use it with a 3.3V system, you may need a level shifter or voltage divider for the outputs.