How to Use Servo mg90s: Examples, Pinouts, and Specs

Introduction
The MG90S is a small, lightweight servo motor widely used in robotics, RC vehicles, and hobby projects. It features a metal gear design, which enhances durability and precision compared to plastic gear servos. The MG90S operates within a voltage range of 4.8V to 6.0V and delivers a torque of approximately 2.2 kg/cm at 6V. Its compact size and reliable performance make it ideal for applications requiring precise control of mechanical movements, such as robotic arms, pan-tilt mechanisms, and model airplanes.
Explore Projects Built with Servo mg90s

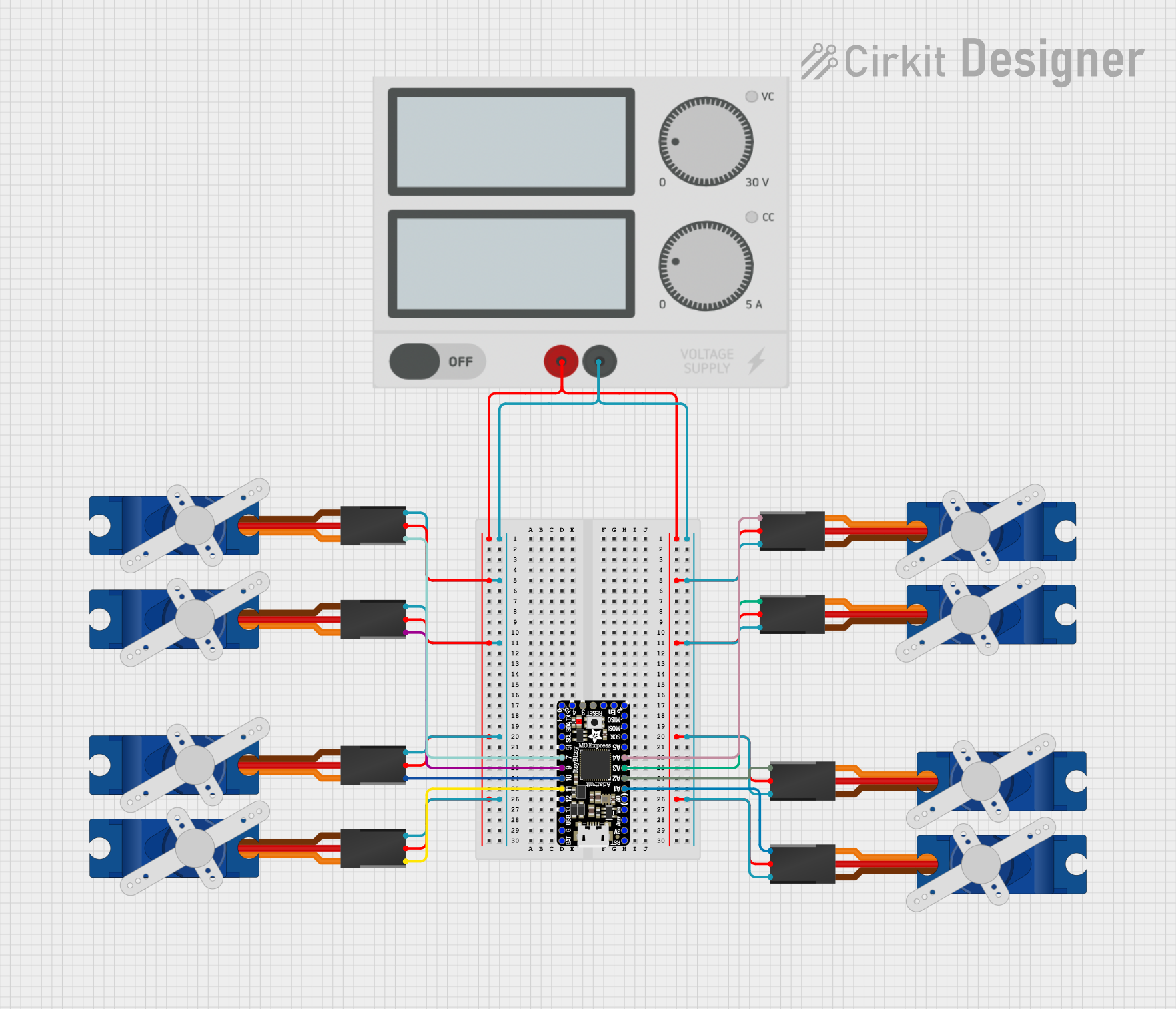
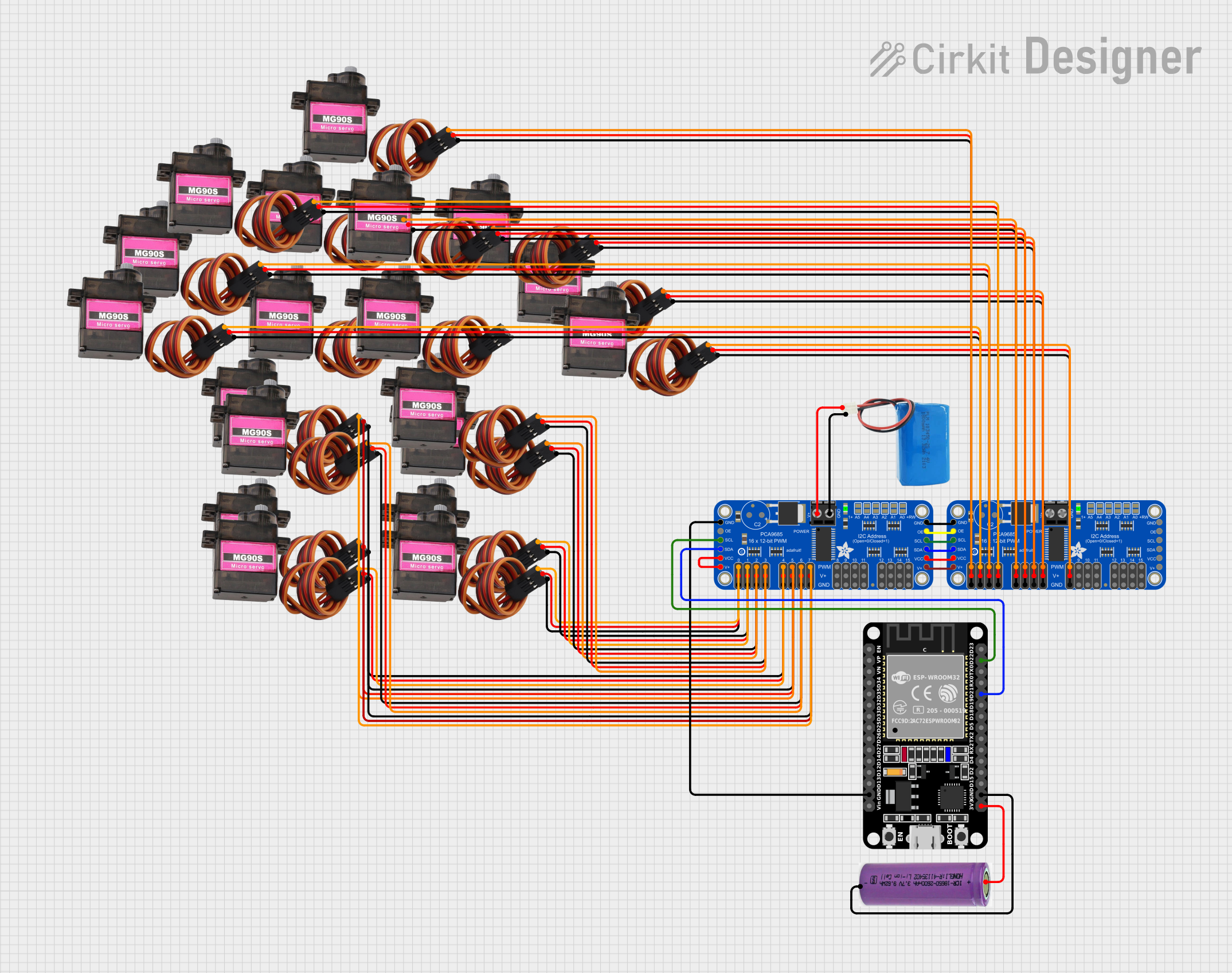
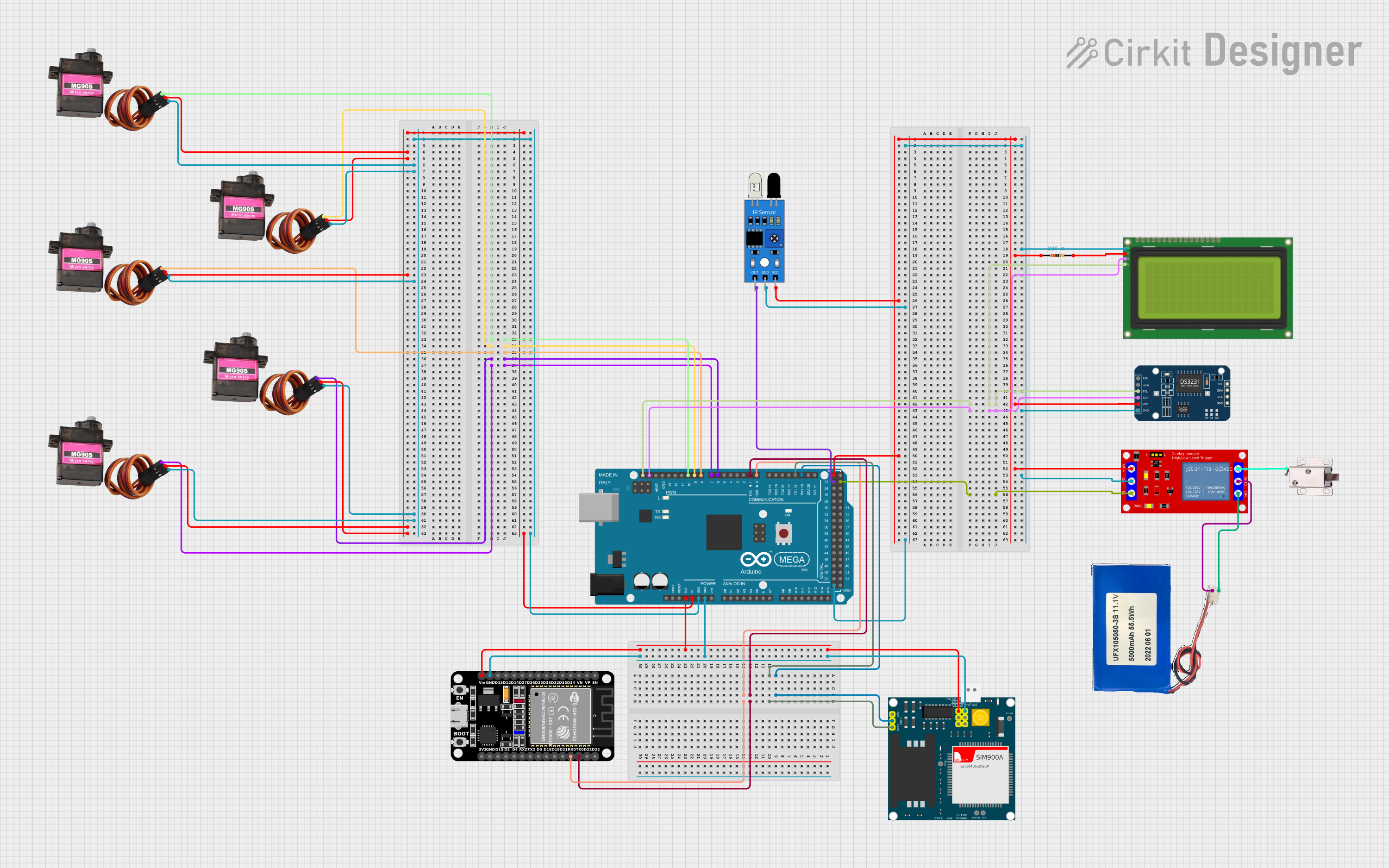
Explore Projects Built with Servo mg90s
Common Applications
- Robotic arms and grippers
- Pan-tilt camera systems
- RC vehicles and airplanes
- Automated mechanisms in hobby projects
- Educational electronics and prototyping
Technical Specifications
Key Specifications
| Parameter | Value |
|---|---|
| Operating Voltage | 4.8V to 6.0V |
| Stall Torque | 1.8 kg/cm (4.8V), 2.2 kg/cm (6.0V) |
| Operating Speed | 0.1 sec/60° (6.0V), 0.12 sec/60° (4.8V) |
| Gear Type | Metal |
| Weight | 13.4 g |
| Dimensions | 22.8 x 12.2 x 28.5 mm |
| Control Signal | PWM (Pulse Width Modulation) |
| PWM Pulse Range | 500 µs to 2500 µs |
| Rotation Angle | 0° to 180° |
| Connector Type | 3-pin female header (Dupont) |
Pin Configuration
The MG90S servo motor has a 3-pin connector with the following pinout:
| Pin Number | Wire Color | Function | Description |
|---|---|---|---|
| 1 | Brown | Ground (GND) | Connect to the ground of the power supply or microcontroller. |
| 2 | Red | Power (VCC) | Connect to a 4.8V to 6.0V power source. |
| 3 | Orange | Signal (PWM) | Connect to the PWM output pin of a microcontroller. |
Usage Instructions
How to Use the MG90S in a Circuit
- Power Connection: Connect the red wire to a 4.8V to 6.0V power source and the brown wire to ground. Ensure the power supply can provide sufficient current (at least 1A) to avoid voltage drops.
- Signal Connection: Connect the orange wire to a PWM-capable pin on your microcontroller (e.g., Arduino).
- PWM Signal: Generate a PWM signal with a pulse width between 500 µs (0°) and 2500 µs (180°). A pulse width of 1500 µs corresponds to the neutral position (90°).
- Mounting: Use the included screws and servo horns to attach the MG90S to your project.
Important Considerations
- Power Supply: Avoid powering the servo directly from the microcontroller's 5V pin, as it may not provide enough current. Use an external power source or a dedicated servo driver.
- PWM Frequency: The MG90S typically operates at a PWM frequency of 50 Hz (20 ms period).
- Overloading: Do not exceed the torque rating to prevent damage to the motor or gears.
- Calibration: Test the servo's range of motion to ensure it does not hit physical stops, which could cause overheating or damage.
Example Code for Arduino UNO
The following example demonstrates how to control the MG90S servo using an Arduino UNO and the Servo library.
#include <Servo.h> // Include the Servo library
Servo myServo; // Create a Servo object to control the MG90S
void setup() {
myServo.attach(9); // Attach the servo to pin 9 on the Arduino
}
void loop() {
myServo.write(0); // Move the servo to 0 degrees
delay(1000); // Wait for 1 second
myServo.write(90); // Move the servo to 90 degrees
delay(1000); // Wait for 1 second
myServo.write(180); // Move the servo to 180 degrees
delay(1000); // Wait for 1 second
}
Best Practices
- Use a capacitor (e.g., 100 µF) across the power supply to stabilize voltage.
- Avoid sudden changes in position to reduce wear on the gears.
- Test the servo with a low load before integrating it into your project.
Troubleshooting and FAQs
Common Issues and Solutions
Servo Not Moving:
- Cause: Incorrect wiring or insufficient power supply.
- Solution: Double-check the connections and ensure the power supply provides at least 1A.
Servo Jittering:
- Cause: Electrical noise or unstable power supply.
- Solution: Add a capacitor across the power supply and ensure proper grounding.
Limited Range of Motion:
- Cause: Incorrect PWM signal or physical obstruction.
- Solution: Verify the PWM pulse width and ensure the servo is not hitting any physical stops.
Overheating:
- Cause: Overloading or continuous operation at high torque.
- Solution: Reduce the load and allow the servo to cool down periodically.
FAQs
Q: Can I power the MG90S directly from the Arduino's 5V pin?
A: It is not recommended, as the Arduino's 5V pin may not provide enough current. Use an external power source.
Q: What is the maximum rotation angle of the MG90S?
A: The MG90S can rotate approximately 180°.
Q: Can I use the MG90S with a Raspberry Pi?
A: Yes, but you will need to generate a 50 Hz PWM signal using a library like RPi.GPIO or a dedicated servo driver.
Q: How do I prevent the servo from jittering?
A: Use a stable power supply, proper grounding, and a capacitor to filter noise.