How to Use Better PIXHAWK 2.4.8: Examples, Pinouts, and Specs
Introduction
The Better PIXHAWK 2.4.8 is an advanced flight control hardware designed for drones and UAVs. It features enhanced processing power, robust sensor integration, and compatibility with various autopilot software platforms such as ArduPilot and PX4. This flight controller is ideal for applications requiring precise navigation, stability, and autonomous operation. It is widely used in aerial photography, surveying, mapping, and research-based UAV projects.
Explore Projects Built with Better PIXHAWK 2.4.8
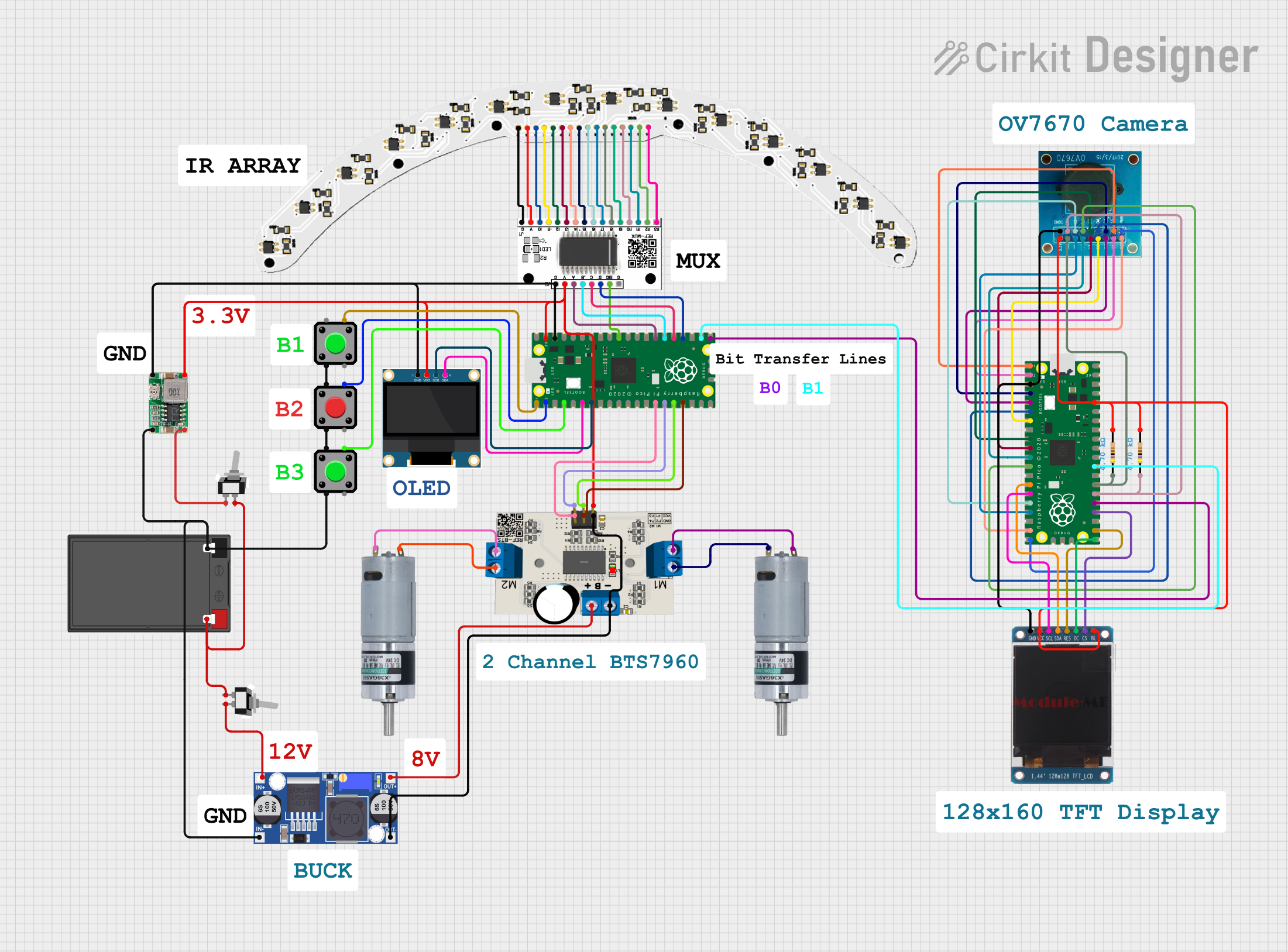

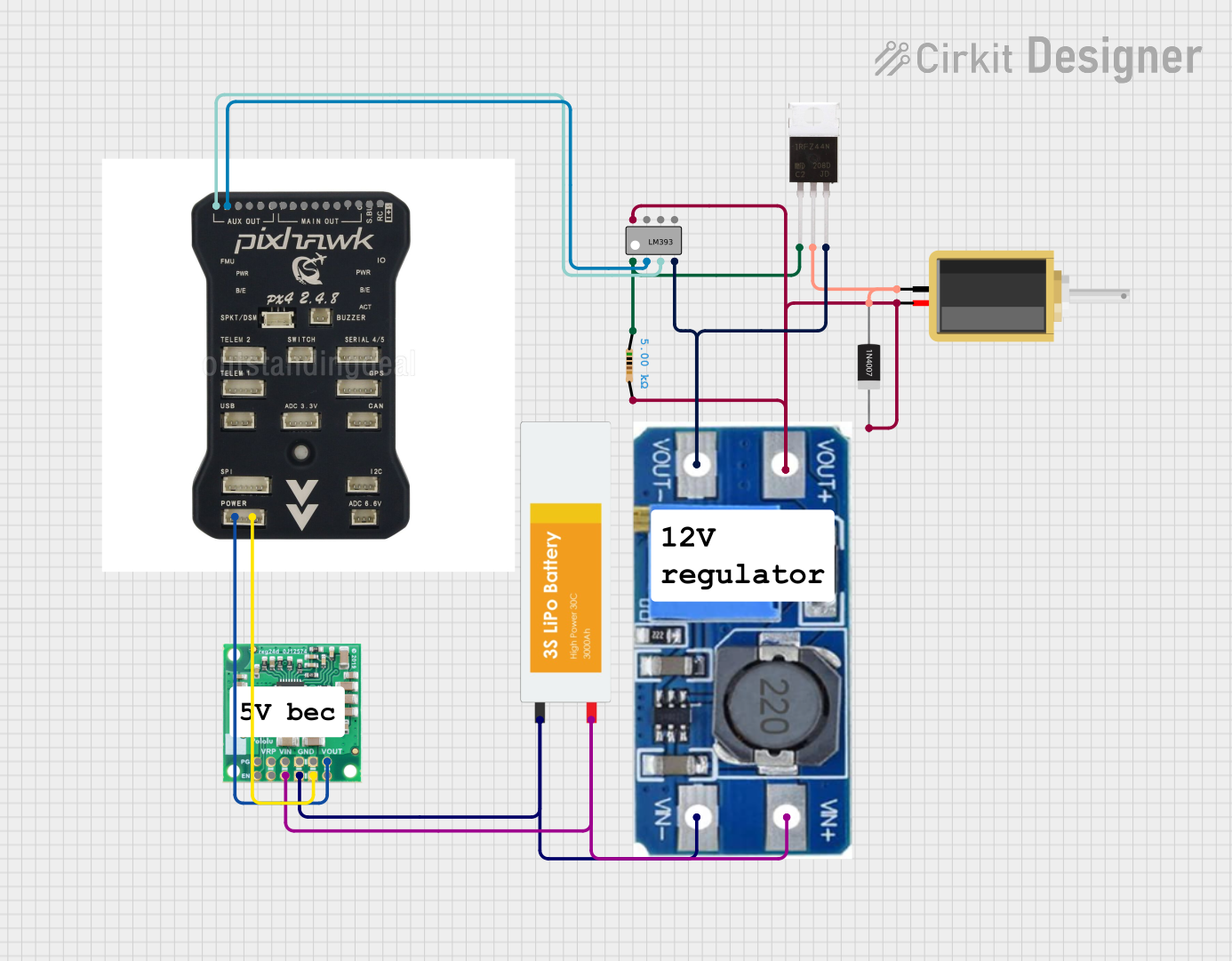
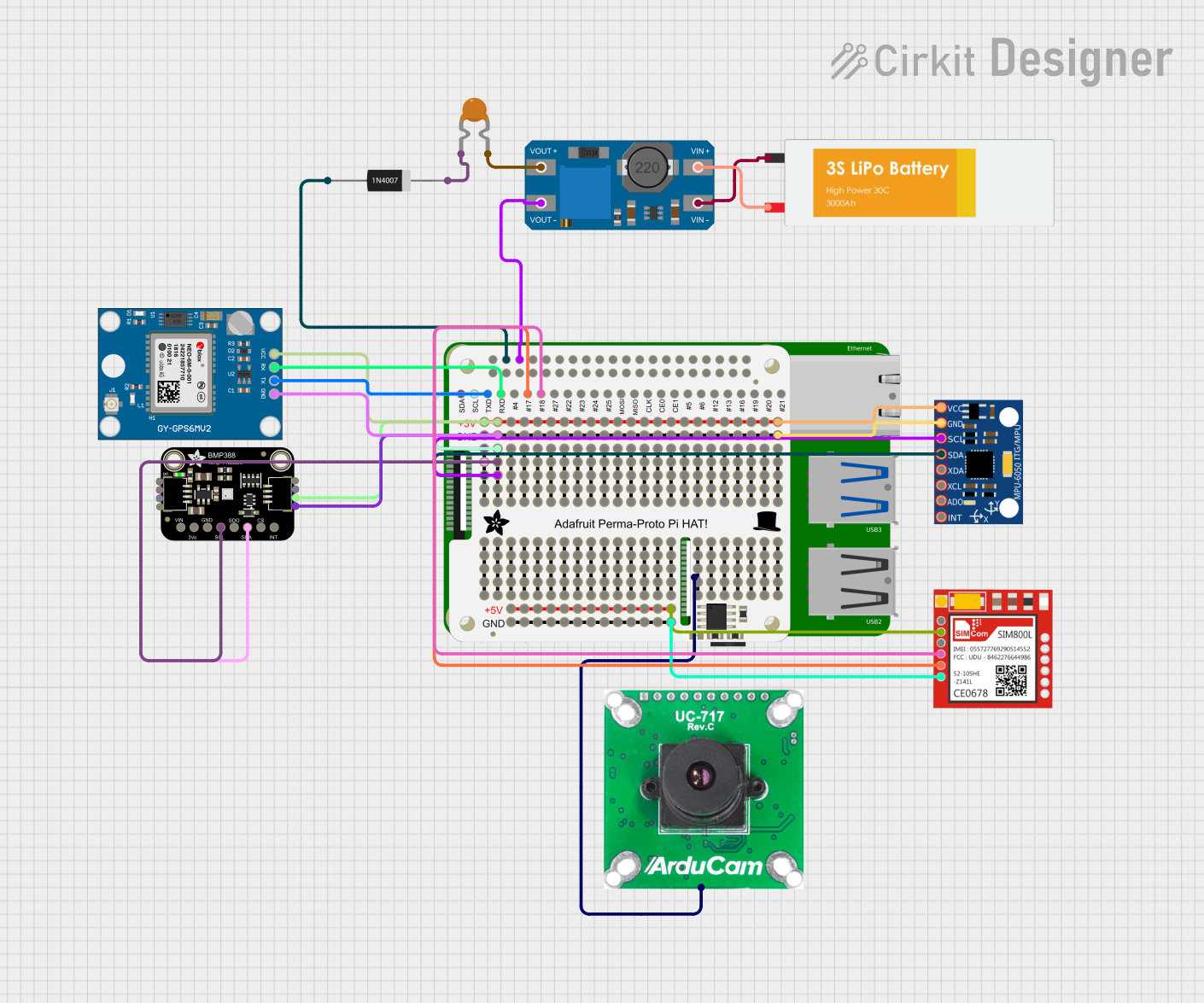
Explore Projects Built with Better PIXHAWK 2.4.8
Technical Specifications
The Better PIXHAWK 2.4.8 offers a range of features and capabilities that make it a versatile and reliable choice for UAV systems.
Key Technical Details
- Processor: 32-bit STM32F427 Cortex-M4, 168 MHz, with FPU
- Sensors:
- Accelerometer: MPU6000
- Gyroscope: MPU6000
- Magnetometer: HMC5883L
- Barometer: MS5611
- Input Voltage: 4.8V to 5.4V
- Power Consumption: ~280mA @ 5V
- Interfaces:
- 2x CAN Bus
- 5x UART (serial ports)
- I2C, SPI, and ADC ports
- PWM Outputs: 8 main outputs, 6 auxiliary outputs
- Flash Memory: 2MB
- RAM: 256KB
- Dimensions: 81.5mm x 50mm x 15.5mm
- Weight: ~38g
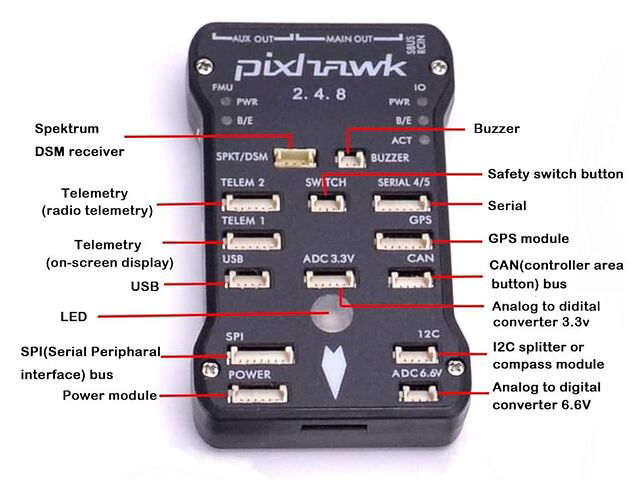
Pin Configuration and Descriptions
The Better PIXHAWK 2.4.8 has multiple connectors for peripherals and power. Below is a summary of the key pin configurations:
Power Input
| Pin Name | Description |
|---|---|
| Power (+) | Positive voltage input (4.8V-5.4V) |
| Power (-) | Ground connection |
PWM Outputs
| Pin Name | Description |
|---|---|
| MAIN OUT 1-8 | Main motor/servo outputs |
| AUX OUT 1-6 | Auxiliary motor/servo outputs |
Communication Interfaces
| Pin Name | Description |
|---|---|
| TELEM1 | Telemetry port 1 (UART) |
| TELEM2 | Telemetry port 2 (UART) |
| GPS | GPS module connection (UART + I2C) |
| I2C | I2C bus for external sensors |
| CAN1, CAN2 | CAN bus for peripherals |
Other Ports
| Pin Name | Description |
|---|---|
| ADC | Analog-to-digital converter input |
| SPI | SPI bus for external devices |
| USB | USB connection for configuration |
| SD Card Slot | MicroSD card for data logging |
Usage Instructions
How to Use the Better PIXHAWK 2.4.8 in a Circuit
Powering the Controller:
- Connect a regulated 5V power supply to the Power (+) and Power (-) pins.
- Ensure the power source can supply sufficient current for the connected peripherals.
Connecting Peripherals:
- Attach motors or servos to the MAIN OUT or AUX OUT pins as required.
- Connect a GPS module to the GPS port for navigation.
- Use the TELEM1 or TELEM2 ports to connect telemetry modules for real-time data transmission.
Flashing Firmware:
- Connect the PIXHAWK to a computer via the USB port.
- Use software like Mission Planner or QGroundControl to flash the desired firmware (e.g., ArduPilot or PX4).
Calibrating Sensors:
- Perform sensor calibration (accelerometer, gyroscope, magnetometer) using the configuration software.
- Ensure the drone is placed on a flat surface during calibration.
Configuring Flight Modes:
- Set up flight modes (e.g., Stabilize, Loiter, Auto) in the configuration software.
- Assign flight mode switches to your RC transmitter.
Important Considerations and Best Practices
- Power Redundancy: Use a power module or backup power source to ensure uninterrupted operation.
- Vibration Isolation: Mount the PIXHAWK on vibration-dampening material to improve sensor accuracy.
- Firmware Updates: Regularly update the firmware to access new features and bug fixes.
- Pre-Flight Checks: Always perform pre-flight checks, including sensor calibration and motor testing.
Example: Connecting to an Arduino UNO
The PIXHAWK can communicate with an Arduino UNO via UART for custom applications. Below is an example code snippet for reading telemetry data from the PIXHAWK:
#include <SoftwareSerial.h>
// Define RX and TX pins for communication with PIXHAWK
SoftwareSerial pixhawkSerial(10, 11); // RX = pin 10, TX = pin 11
void setup() {
// Initialize serial communication
Serial.begin(9600); // For debugging via Serial Monitor
pixhawkSerial.begin(57600); // Communication with PIXHAWK
Serial.println("Starting communication with PIXHAWK...");
}
void loop() {
// Check if data is available from PIXHAWK
if (pixhawkSerial.available()) {
// Read and print data from PIXHAWK
char data = pixhawkSerial.read();
Serial.print(data);
}
// Optional: Send data to PIXHAWK
// pixhawkSerial.write("Hello PIXHAWK");
}
Note: Ensure the UART baud rate matches the PIXHAWK's telemetry settings.
Troubleshooting and FAQs
Common Issues and Solutions
No Power to the PIXHAWK:
- Cause: Insufficient or incorrect power supply.
- Solution: Verify the input voltage is within the 4.8V-5.4V range. Check all power connections.
Telemetry Module Not Connecting:
- Cause: Incorrect baud rate or wiring.
- Solution: Ensure the telemetry module is connected to the correct TELEM port and the baud rate matches the configuration.
Unstable Flight:
- Cause: Improper sensor calibration or vibration interference.
- Solution: Recalibrate all sensors and ensure the PIXHAWK is mounted on vibration-dampening material.
Firmware Flashing Fails:
- Cause: USB connection issue or incompatible firmware.
- Solution: Check the USB cable and port. Ensure the firmware is compatible with the PIXHAWK 2.4.8.
FAQs
Q: Can I use the PIXHAWK 2.4.8 with fixed-wing aircraft?
- A: Yes, the PIXHAWK supports fixed-wing, multirotor, and VTOL aircraft.
Q: What is the maximum number of motors supported?
- A: The PIXHAWK 2.4.8 supports up to 14 motors (8 main outputs + 6 auxiliary outputs).
Q: How do I log flight data?
- A: Insert a MicroSD card into the SD card slot. The PIXHAWK will automatically log flight data.
Q: Is the PIXHAWK compatible with LiDAR sensors?
- A: Yes, LiDAR sensors can be connected via I2C, UART, or CAN interfaces.
By following this documentation, users can effectively integrate and operate the Better PIXHAWK 2.4.8 in their UAV projects.