How to Use AEAT-601B: Examples, Pinouts, and Specs
Introduction
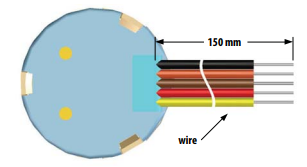
The AEAT-601B is a high-performance absolute optical encoder designed to provide precise position feedback in a wide range of applications. Leveraging advanced optical technology, this encoder delivers exceptional resolution and accuracy, making it an ideal choice for demanding environments. Its robust design ensures reliable operation in robotics, industrial automation, and motion control systems.
Explore Projects Built with AEAT-601B



Explore Projects Built with AEAT-601B
Common Applications
- Robotics: For precise joint or wheel position feedback.
- Industrial Automation: Used in conveyor systems, CNC machines, and assembly lines.
- Motion Control Systems: Provides accurate position data for motors and actuators.
- Medical Equipment: Ensures precision in devices like robotic surgical arms.
- Aerospace: Used in navigation and control systems requiring high accuracy.
Technical Specifications
Key Technical Details
| Parameter | Value |
|---|---|
| Operating Voltage | 5 V DC ± 10% |
| Current Consumption | 30 mA (typical) |
| Resolution | Up to 12 bits (4096 positions per revolution) |
| Output Format | Parallel Gray Code |
| Operating Temperature | -40°C to +125°C |
| Maximum Rotational Speed | 10,000 RPM |
| Shaft Diameter | 6 mm |
| Mounting Type | Flange Mount |
Pin Configuration and Descriptions
| Pin Number | Pin Name | Description |
|---|---|---|
| 1 | VCC | Power supply input (5 V DC) |
| 2 | GND | Ground |
| 3-14 | DATA[11:0] | Parallel Gray Code output (12-bit data) |
| 15 | NC | Not connected |
| 16 | NC | Not connected |
Usage Instructions
How to Use the AEAT-601B in a Circuit
- Power Supply: Connect the VCC pin to a stable 5 V DC power source and the GND pin to the ground of your circuit.
- Data Output: The encoder outputs a 12-bit parallel Gray Code representing the absolute position. Connect the DATA[11:0] pins to a microcontroller or digital input device capable of decoding Gray Code.
- Mounting: Secure the encoder using the flange mount and ensure the shaft is properly aligned with the rotating element.
- Decoding Gray Code: Use a microcontroller or dedicated decoder to convert the Gray Code output into binary or decimal format for position calculations.
Important Considerations and Best Practices
- Power Stability: Ensure the power supply is stable and within the specified range to avoid erratic behavior.
- Signal Integrity: Use short, shielded cables for the data lines to minimize noise and interference.
- Alignment: Properly align the encoder shaft with the rotating element to prevent mechanical stress.
- Temperature Range: Operate the encoder within the specified temperature range to ensure accuracy and longevity.
- Gray Code Decoding: If using an Arduino UNO, you can implement a Gray Code to binary conversion algorithm in your code.
Example Arduino Code
// Example code to read and decode Gray Code from AEAT-601B using Arduino UNO
// Define the data pins connected to the encoder
const int dataPins[12] = {2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13};
// Function to convert Gray Code to binary
unsigned int grayToBinary(unsigned int gray) {
unsigned int binary = gray;
while (gray >>= 1) {
binary ^= gray;
}
return binary;
}
void setup() {
Serial.begin(9600); // Initialize serial communication
// Set data pins as input
for (int i = 0; i < 12; i++) {
pinMode(dataPins[i], INPUT);
}
}
void loop() {
unsigned int grayCode = 0;
// Read the 12-bit Gray Code from the encoder
for (int i = 0; i < 12; i++) {
grayCode |= digitalRead(dataPins[i]) << i;
}
// Convert Gray Code to binary
unsigned int position = grayToBinary(grayCode);
// Print the position to the serial monitor
Serial.print("Position: ");
Serial.println(position);
delay(100); // Delay for stability
}
Troubleshooting and FAQs
Common Issues and Solutions
No Output from Encoder:
- Cause: Power supply not connected or incorrect voltage.
- Solution: Verify the VCC and GND connections and ensure the supply voltage is 5 V DC.
Erratic Position Readings:
- Cause: Electrical noise or interference on data lines.
- Solution: Use shielded cables and ensure proper grounding.
Incorrect Position Values:
- Cause: Gray Code not properly decoded.
- Solution: Check the decoding algorithm in your microcontroller code.
Mechanical Misalignment:
- Cause: Shaft not properly aligned with the rotating element.
- Solution: Re-align the encoder and ensure it is securely mounted.
FAQs
Q1: Can the AEAT-601B be used with a 3.3 V system?
A1: No, the AEAT-601B requires a 5 V DC power supply. Use a level shifter if interfacing with a 3.3 V system.
Q2: What is the maximum cable length for data transmission?
A2: For reliable operation, keep the cable length under 1 meter. Use shielded cables to minimize noise.
Q3: How do I interpret the Gray Code output?
A3: The Gray Code must be converted to binary using a decoding algorithm. Refer to the example Arduino code provided above.
Q4: Can the encoder operate in harsh environments?
A4: Yes, the AEAT-601B is designed to operate in temperatures ranging from -40°C to +125°C, making it suitable for industrial and outdoor applications.