How to Use TB6612 DRV8833: Examples, Pinouts, and Specs
Introduction
The TB6612 DRV8833 is a dual H-bridge motor driver IC designed for driving DC motors and stepper motors. It is widely used in robotics, automation, and other motor control applications due to its compact size, high efficiency, and ease of use. This component allows for independent control of two motors, including forward, reverse, and braking functionality.
Common applications include:
- Robotics (e.g., controlling wheels or arms)
- Automated conveyor systems
- Small-scale CNC machines
- DIY electronics projects involving motorized components
Explore Projects Built with TB6612 DRV8833


Explore Projects Built with TB6612 DRV8833
Technical Specifications
The TB6612 DRV8833 motor driver has the following key technical specifications:
| Parameter | Value |
|---|---|
| Operating Voltage (Vcc) | 2.7V to 10.8V |
| Motor Output Voltage | 0V to Vcc |
| Continuous Output Current | 1.0A per channel (max) |
| Peak Output Current | 2.0A per channel (short duration) |
| Logic Input Voltage | 1.8V to 7.0V |
| PWM Frequency | Up to 100 kHz |
| Standby Current | < 1 µA |
| Thermal Shutdown | Yes |
| Overcurrent Protection | Yes |
Pin Configuration and Descriptions
The TB6612 DRV8833 comes in a 16-pin package. Below is the pin configuration:
| Pin | Name | Description |
|---|---|---|
| 1 | AIN1 | Input signal for Motor A (controls direction) |
| 2 | AIN2 | Input signal for Motor A (controls direction) |
| 3 | PWMA | PWM input for Motor A (controls speed) |
| 4 | AOUT1 | Output 1 for Motor A |
| 5 | AOUT2 | Output 2 for Motor A |
| 6 | VM | Motor power supply (2.7V to 10.8V) |
| 7 | GND | Ground |
| 8 | VCC | Logic power supply (1.8V to 7.0V) |
| 9 | STBY | Standby mode control (active high) |
| 10 | BOUT2 | Output 2 for Motor B |
| 11 | BOUT1 | Output 1 for Motor B |
| 12 | PWMB | PWM input for Motor B (controls speed) |
| 13 | BIN2 | Input signal for Motor B (controls direction) |
| 14 | BIN1 | Input signal for Motor B (controls direction) |
| 15 | NC | No connection |
| 16 | NC | No connection |
Usage Instructions
How to Use the TB6612 DRV8833 in a Circuit
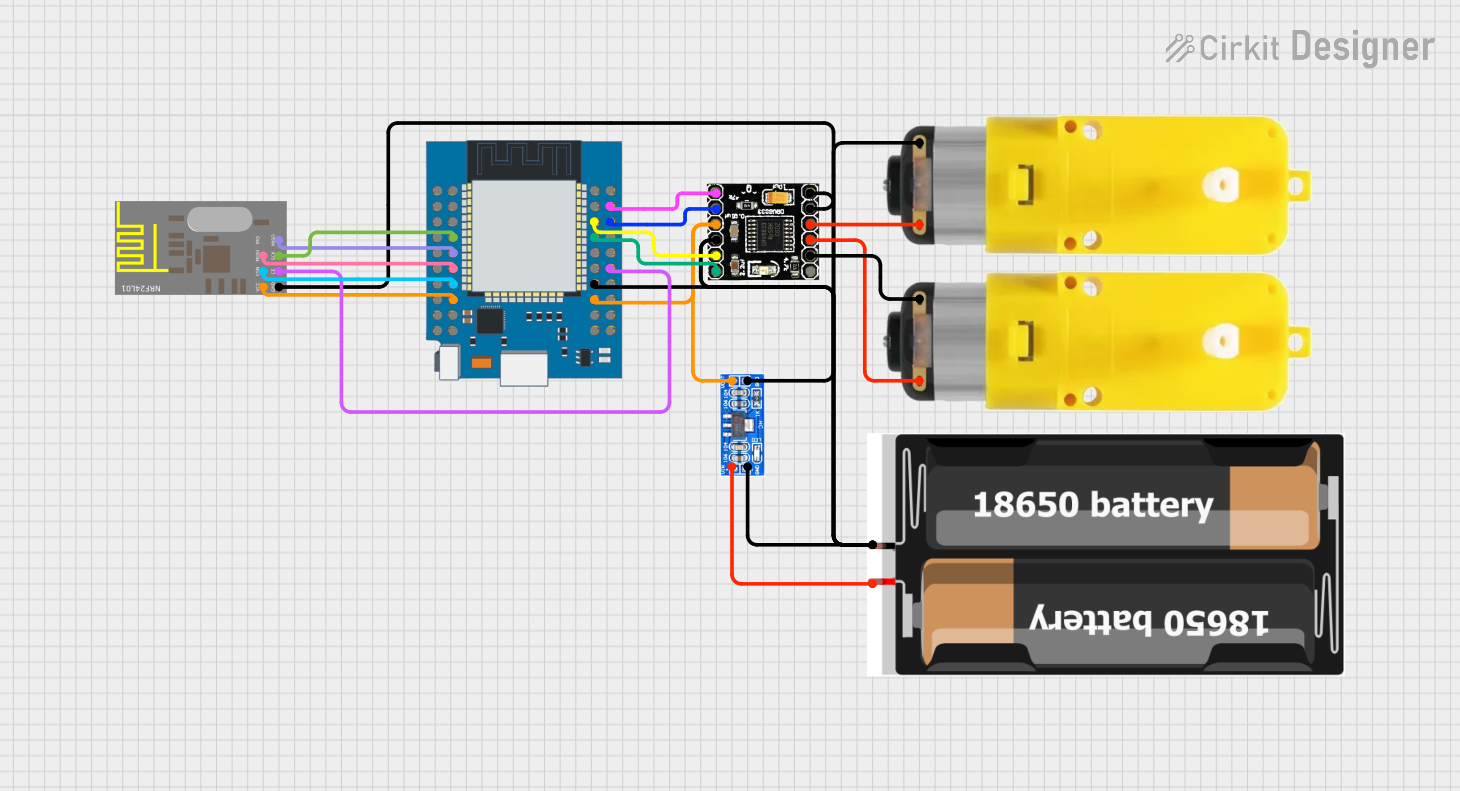
Power Connections:
- Connect the motor power supply (VM) to the motor voltage source (2.7V to 10.8V).
- Connect the logic power supply (VCC) to a voltage source compatible with your microcontroller (1.8V to 7.0V).
- Connect the GND pin to the ground of your circuit.
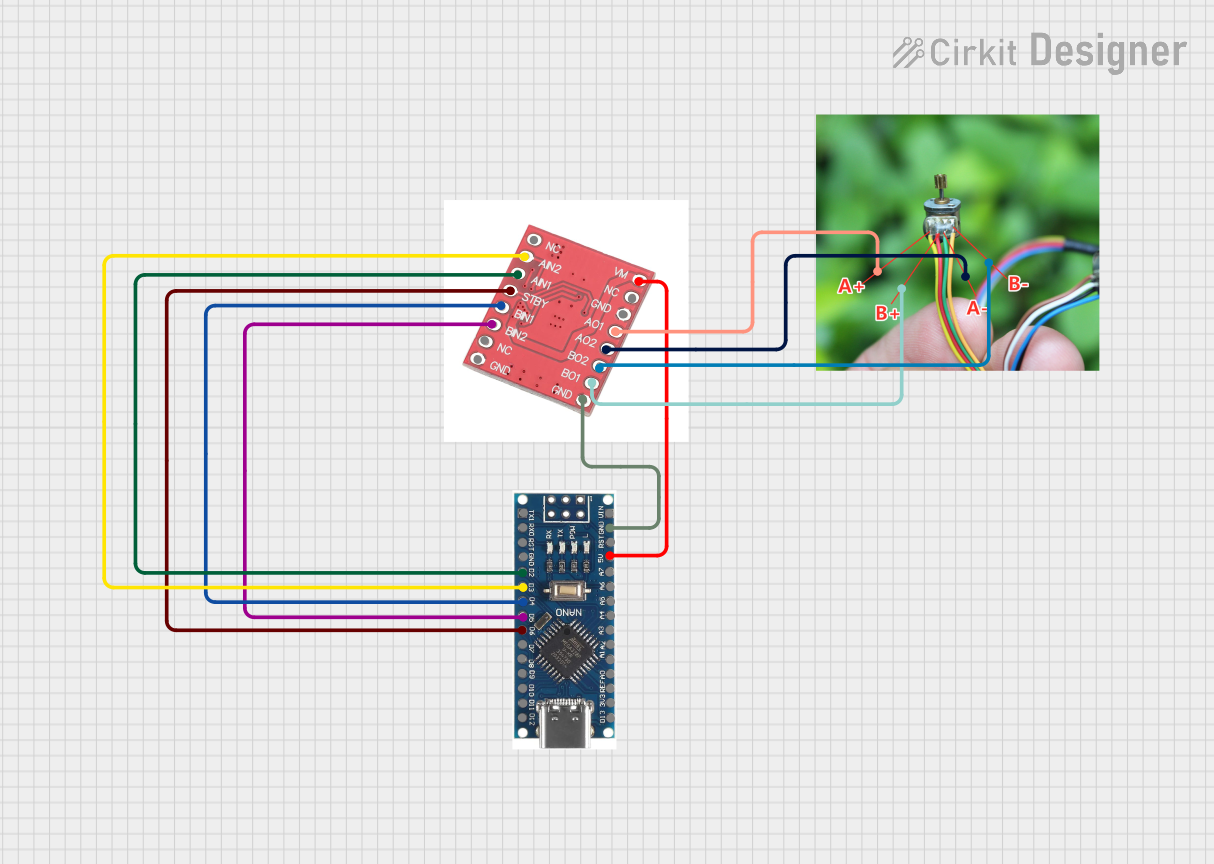
Motor Connections:
- Connect the motor terminals to the AOUT1/AOUT2 pins for Motor A and BOUT1/BOUT2 pins for Motor B.
Control Signals:
- Use the AIN1/AIN2 and BIN1/BIN2 pins to control the direction of Motor A and Motor B, respectively.
- Use the PWMA and PWMB pins to control the speed of Motor A and Motor B using PWM signals.
- Set the STBY pin high to enable the motor driver. Pull it low to put the driver in standby mode.
PWM Control:
- Generate PWM signals from a microcontroller (e.g., Arduino) to control motor speed. The duty cycle of the PWM signal determines the speed.
Important Considerations and Best Practices
- Ensure that the motor power supply voltage (VM) matches the voltage rating of your motors.
- Use decoupling capacitors near the VM and VCC pins to reduce noise and improve stability.
- Avoid exceeding the maximum current ratings to prevent damage to the IC.
- Use proper heat dissipation techniques if operating near the maximum current limits.
Example: Connecting to an Arduino UNO
Below is an example Arduino sketch to control two DC motors using the TB6612 DRV8833:
// Define motor control pins
#define AIN1 7 // Motor A direction pin 1
#define AIN2 6 // Motor A direction pin 2
#define PWMA 5 // Motor A speed (PWM) pin
#define BIN1 4 // Motor B direction pin 1
#define BIN2 3 // Motor B direction pin 2
#define PWMB 2 // Motor B speed (PWM) pin
#define STBY 8 // Standby pin
void setup() {
// Set motor control pins as outputs
pinMode(AIN1, OUTPUT);
pinMode(AIN2, OUTPUT);
pinMode(PWMA, OUTPUT);
pinMode(BIN1, OUTPUT);
pinMode(BIN2, OUTPUT);
pinMode(PWMB, OUTPUT);
pinMode(STBY, OUTPUT);
// Enable the motor driver
digitalWrite(STBY, HIGH);
}
void loop() {
// Motor A: Forward at 50% speed
digitalWrite(AIN1, HIGH);
digitalWrite(AIN2, LOW);
analogWrite(PWMA, 128); // 50% duty cycle (0-255)
// Motor B: Reverse at 75% speed
digitalWrite(BIN1, LOW);
digitalWrite(BIN2, HIGH);
analogWrite(PWMB, 192); // 75% duty cycle (0-255)
delay(2000); // Run motors for 2 seconds
// Stop both motors
analogWrite(PWMA, 0);
analogWrite(PWMB, 0);
delay(2000); // Wait for 2 seconds
}
Troubleshooting and FAQs
Common Issues
Motors Not Running:
- Ensure the STBY pin is set high to enable the motor driver.
- Check the power supply connections for VM and VCC.
- Verify that the PWM signals are being generated correctly.
Overheating:
- Ensure the current drawn by the motors does not exceed the IC's maximum ratings.
- Use a heat sink or proper ventilation if necessary.
Erratic Motor Behavior:
- Check for loose or incorrect wiring.
- Add decoupling capacitors near the power supply pins to reduce noise.
FAQs
Q: Can I use the TB6612 DRV8833 to drive stepper motors?
A: Yes, the TB6612 DRV8833 can drive stepper motors by controlling the two H-bridges in a coordinated manner. You will need to generate the appropriate step and direction signals.
Q: What is the difference between VM and VCC?
A: VM powers the motors, while VCC powers the logic circuitry of the IC. Ensure both are within their respective voltage ranges.
Q: Can I use this driver with a 3.3V microcontroller?
A: Yes, the TB6612 DRV8833 supports logic input voltages as low as 1.8V, making it compatible with 3.3V microcontrollers.