How to Use TOF050C: Examples, Pinouts, and Specs
Introduction
The TOF050C is a time-of-flight (TOF) sensor designed for precise distance measurement and object detection. It operates by emitting a light pulse and calculating the time it takes for the light to reflect back from an object. This enables highly accurate distance readings, even in dynamic environments. The TOF050C is widely used in applications such as robotics, automation, drones, industrial equipment, and smart home devices.
Explore Projects Built with TOF050C
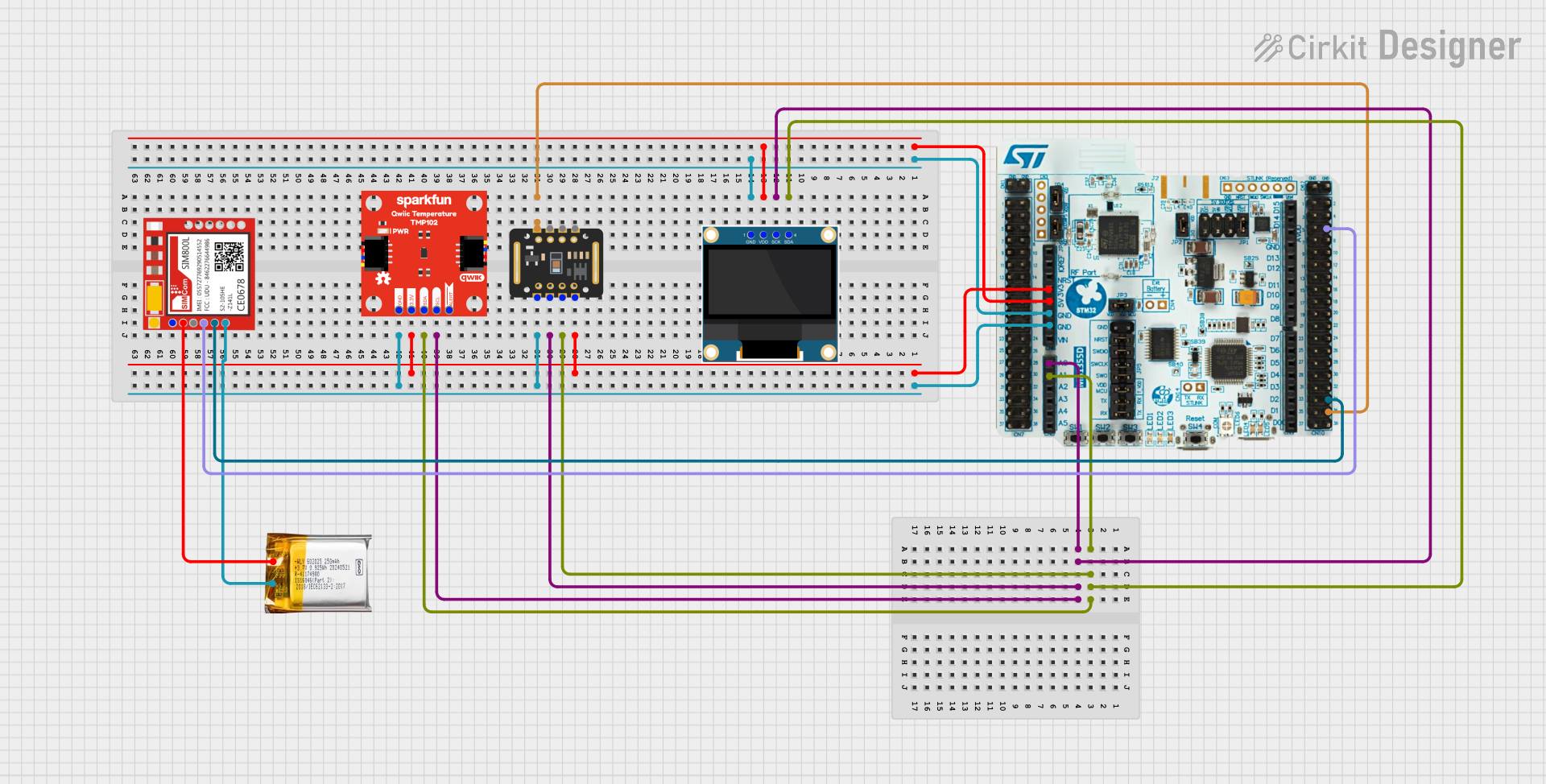
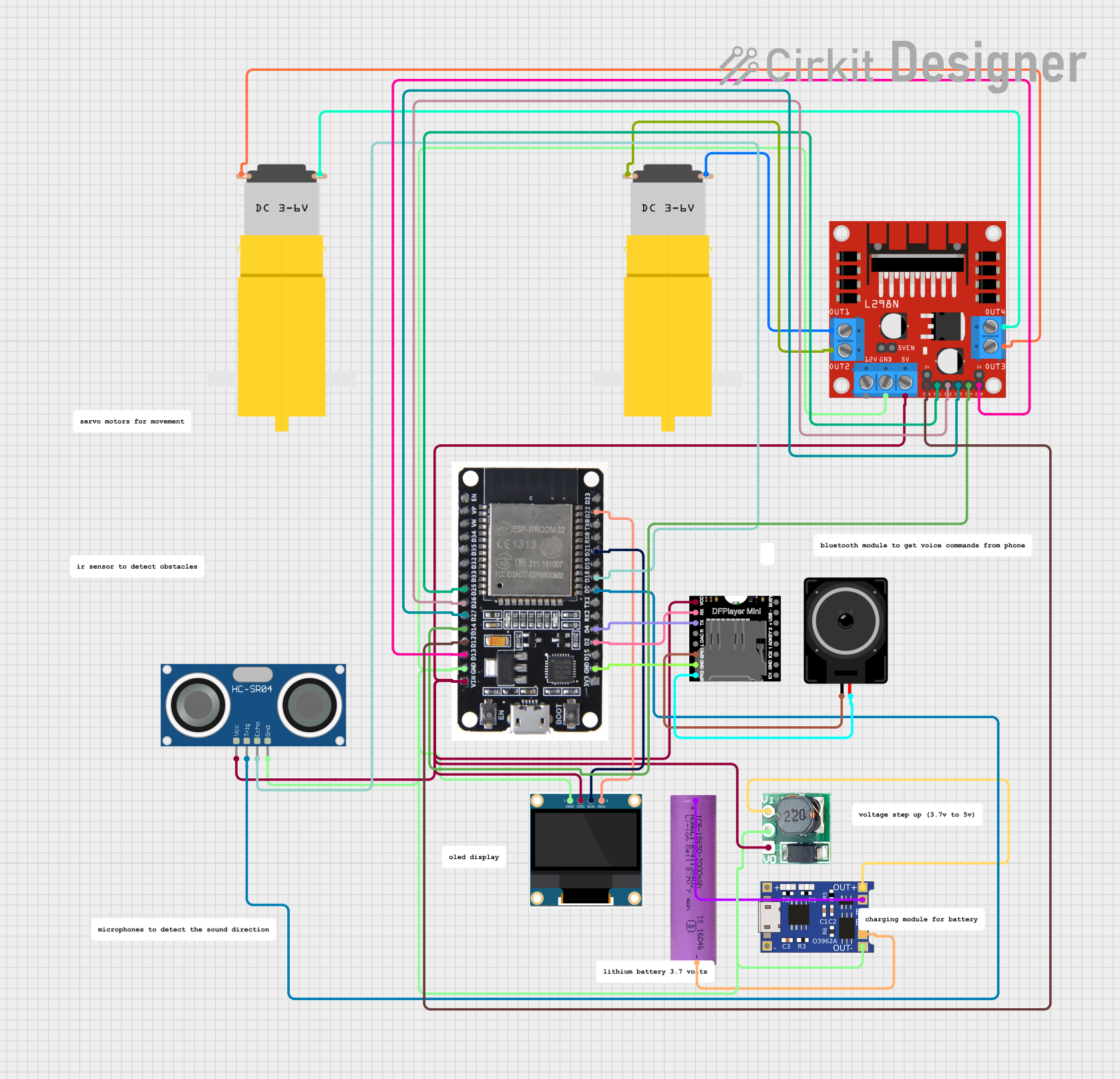

Explore Projects Built with TOF050C
Common Applications:
- Obstacle detection in robotics
- Distance measurement in drones
- Presence detection in smart home systems
- Industrial automation and safety systems
- Gesture recognition in consumer electronics
Technical Specifications
The TOF050C is a compact and efficient sensor with the following key specifications:
| Parameter | Value |
|---|---|
| Operating Voltage | 2.8V to 5.5V |
| Operating Current | 20 mA (typical) |
| Measurement Range | 5 mm to 2 m |
| Accuracy | ±3% (typical) |
| Light Source | 940 nm Infrared (IR) Laser |
| Field of View (FoV) | 27° |
| Communication Interface | I2C |
| I2C Address (Default) | 0x29 |
| Operating Temperature | -20°C to 70°C |
| Dimensions | 4.4 mm x 2.4 mm x 1.0 mm |
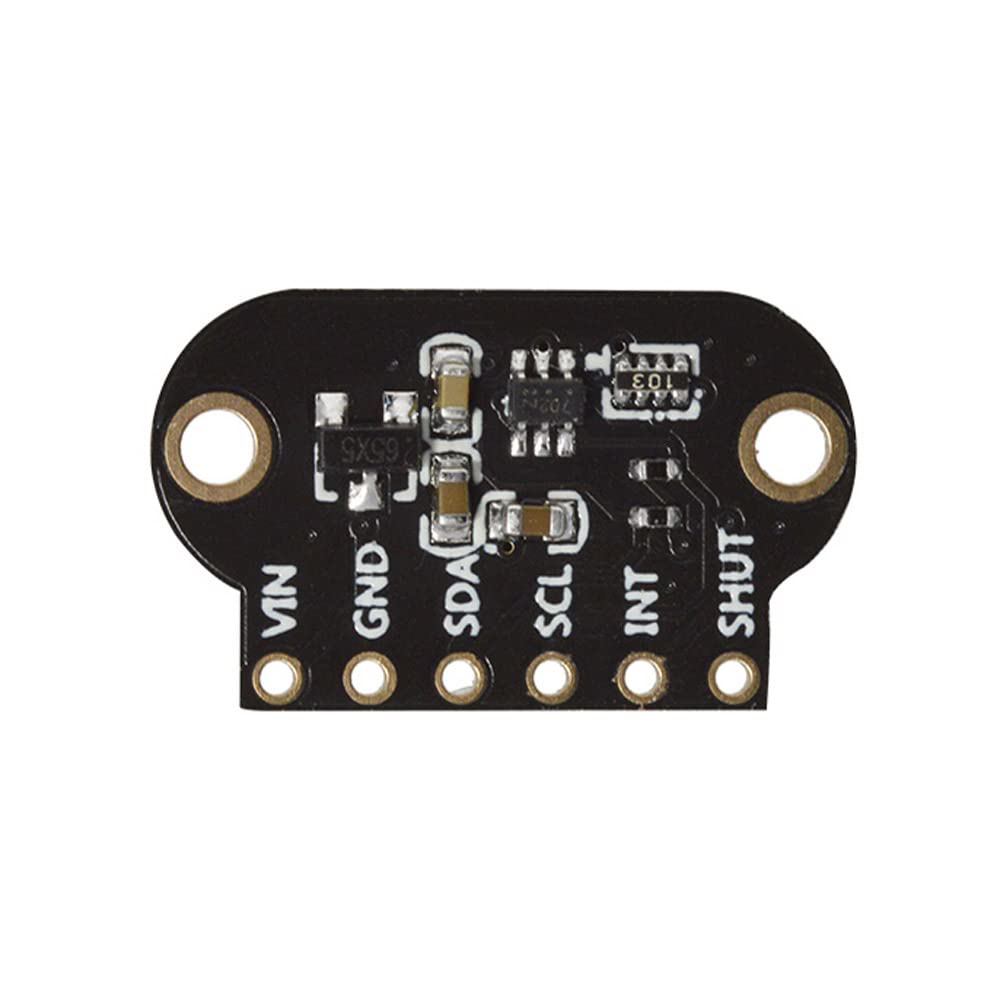
Pin Configuration and Descriptions
The TOF050C has a 6-pin configuration as detailed below:
| Pin | Name | Description |
|---|---|---|
| 1 | VCC | Power supply input (2.8V to 5.5V) |
| 2 | GND | Ground connection |
| 3 | SDA | I2C data line |
| 4 | SCL | I2C clock line |
| 5 | GPIO1 | General-purpose I/O pin (interrupt or configuration) |
| 6 | XSHUT | Shutdown pin (active low, used to enable/disable) |
Usage Instructions
Using the TOF050C in a Circuit
- Power Supply: Connect the VCC pin to a 3.3V or 5V power source and the GND pin to ground.
- I2C Communication: Connect the SDA and SCL pins to the corresponding I2C pins on your microcontroller (e.g., Arduino).
- Shutdown Control: Use the XSHUT pin to enable or disable the sensor. Pull it high to enable the sensor and low to shut it down.
- Interrupts: The GPIO1 pin can be configured as an interrupt pin for event detection.
Important Considerations:
- Use appropriate pull-up resistors (typically 4.7 kΩ) on the SDA and SCL lines for I2C communication.
- Avoid exposing the sensor to direct sunlight or reflective surfaces, as this may affect accuracy.
- Ensure the sensor is mounted securely to prevent vibrations or misalignment.
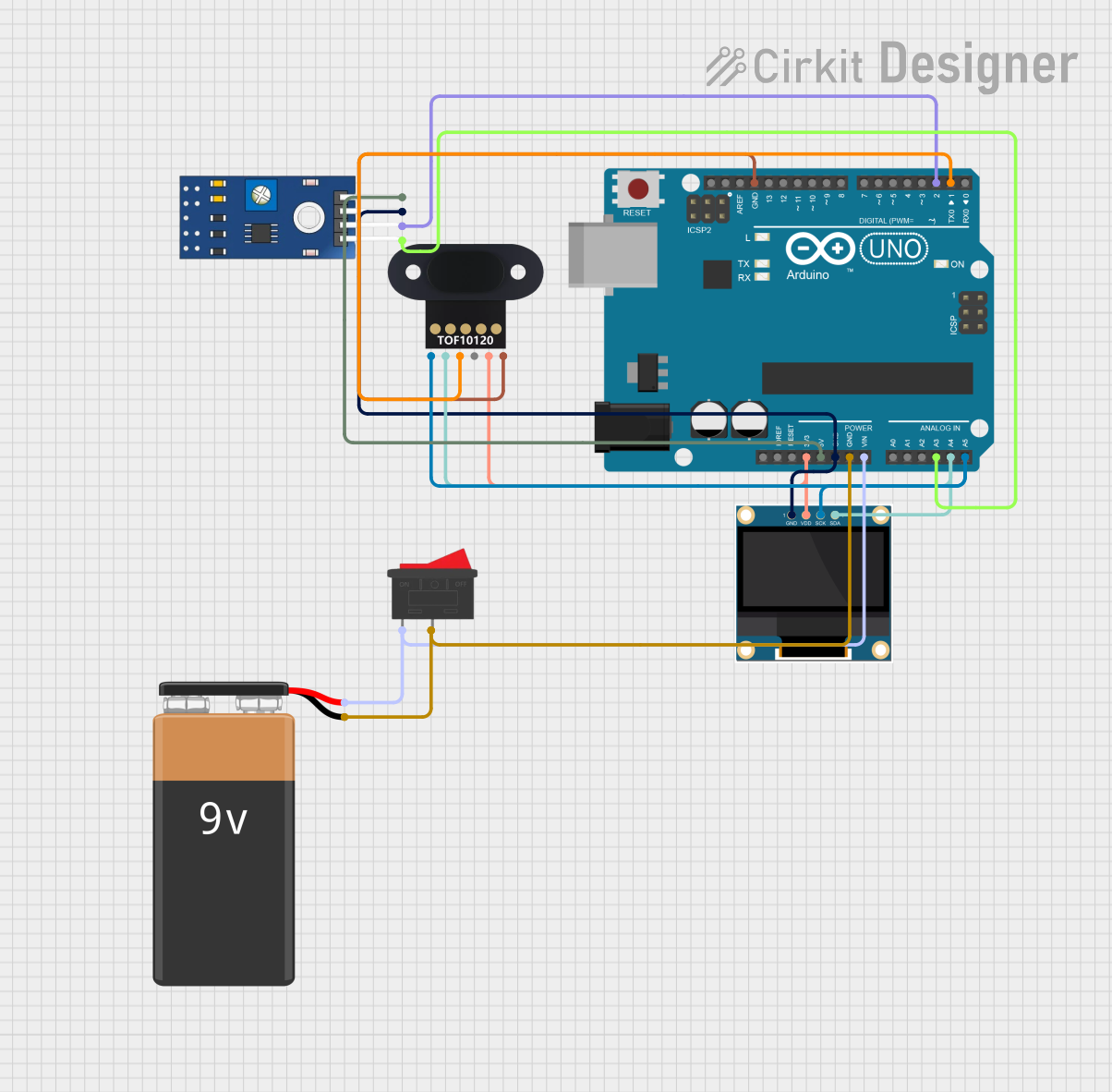
Example Code for Arduino UNO
Below is an example of how to interface the TOF050C with an Arduino UNO using the Wire library:
#include <Wire.h>
#define TOF050C_I2C_ADDRESS 0x29 // Default I2C address of the TOF050C
void setup() {
Wire.begin(); // Initialize I2C communication
Serial.begin(9600); // Initialize serial communication for debugging
// Initialize the TOF050C sensor
if (!initializeTOF050C()) {
Serial.println("Failed to initialize TOF050C sensor!");
while (1); // Halt execution if initialization fails
}
Serial.println("TOF050C sensor initialized successfully.");
}
void loop() {
int distance = readDistance();
if (distance >= 0) {
Serial.print("Distance: ");
Serial.print(distance);
Serial.println(" mm");
} else {
Serial.println("Error reading distance.");
}
delay(500); // Wait 500ms before the next reading
}
bool initializeTOF050C() {
Wire.beginTransmission(TOF050C_I2C_ADDRESS);
// Example: Write initialization commands to the sensor
// Replace with actual initialization sequence from the datasheet
if (Wire.endTransmission() != 0) {
return false; // Return false if communication fails
}
return true;
}
int readDistance() {
Wire.beginTransmission(TOF050C_I2C_ADDRESS);
// Example: Request distance measurement
// Replace with actual commands from the datasheet
Wire.write(0x00); // Hypothetical register for distance measurement
if (Wire.endTransmission() != 0) {
return -1; // Return -1 if communication fails
}
Wire.requestFrom(TOF050C_I2C_ADDRESS, 2); // Request 2 bytes of data
if (Wire.available() == 2) {
int highByte = Wire.read();
int lowByte = Wire.read();
return (highByte << 8) | lowByte; // Combine high and low bytes
}
return -1; // Return -1 if data is unavailable
}
Notes:
- Refer to the TOF050C datasheet for the exact initialization and measurement commands.
- Modify the I2C address if the default address (0x29) is changed.
Troubleshooting and FAQs
Common Issues:
Sensor Not Responding:
- Ensure the VCC and GND connections are secure.
- Verify that the XSHUT pin is pulled high to enable the sensor.
- Check the I2C address and ensure it matches the one used in the code.
Inaccurate Distance Measurements:
- Avoid reflective or transparent surfaces in the sensor's field of view.
- Ensure the sensor is not exposed to excessive ambient light.
I2C Communication Errors:
- Check the pull-up resistors on the SDA and SCL lines.
- Verify the I2C connections and ensure there are no loose wires.
FAQs:
Q: Can the TOF050C measure distances beyond 2 meters?
A: No, the TOF050C is designed for a maximum range of 2 meters. For longer ranges, consider using a different TOF sensor.
Q: How do I change the I2C address of the TOF050C?
A: The I2C address can typically be changed via specific configuration commands. Refer to the datasheet for details.
Q: Can the TOF050C detect transparent objects?
A: The sensor may struggle with transparent objects due to low reflectivity. Use additional sensors for such applications.
Q: Is the TOF050C suitable for outdoor use?
A: While the TOF050C can operate in a wide temperature range, direct sunlight may affect its performance. Use protective enclosures or filters for outdoor applications.