How to Use TMC2209 SilentStepStick: Examples, Pinouts, and Specs
Introduction
The TMC2209 SilentStepStick, manufactured by Trinamic (Part ID: TMC2209 Board), is a high-performance stepper motor driver designed for applications requiring precise and quiet operation. It is widely used in 3D printers, CNC machines, and other motion control systems. The TMC2209 features advanced microstepping capabilities, stall detection, and UART-based configuration, making it a versatile and efficient choice for stepper motor control.
Explore Projects Built with TMC2209 SilentStepStick

Explore Projects Built with TMC2209 SilentStepStick
Common Applications
- 3D printers for smooth and silent axis movement
- CNC machines for precise motion control
- Robotics and automation systems
- Laser cutters and engravers
- Any application requiring low-noise stepper motor operation
Technical Specifications
Key Technical Details
| Parameter | Value |
|---|---|
| Supply Voltage (V_M) | 4.75V to 29V |
| Logic Voltage (V_IO) | 3.3V or 5V |
| Maximum Motor Current | 2.0A RMS (2.8A peak) |
| Microstepping Resolution | Up to 1/256 |
| Communication Interface | UART |
| Standby Current | Configurable via UART |
| Stall Detection | Yes (StallGuard™) |
| CoolStep™ Current Control | Yes |
| SpreadCycle™ Chopper Mode | Yes |
| StealthChop2™ Mode | Yes (for ultra-quiet operation) |
| Dimensions | 15mm x 20mm |
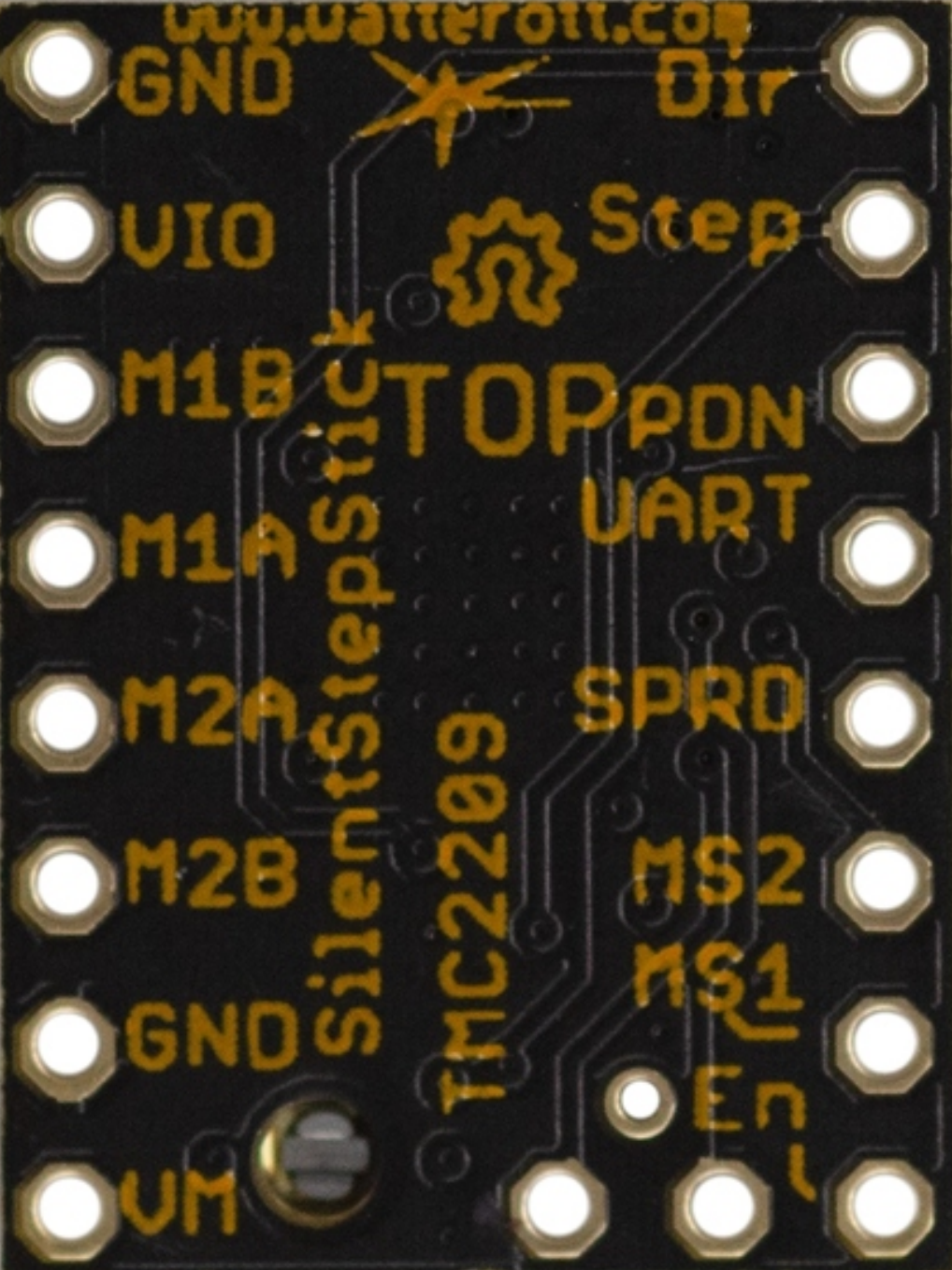
Pin Configuration and Descriptions
The TMC2209 SilentStepStick has a standard pinout for stepper motor drivers. Below is the pin configuration:
| Pin Name | Description |
|---|---|
| GND | Ground connection |
| V_M | Motor power supply (4.75V to 29V) |
| V_IO | Logic voltage input (3.3V or 5V) |
| EN | Enable pin (active low) |
| DIR | Direction control input |
| STEP | Step pulse input |
| MS1, MS2 | Microstepping resolution selection pins |
| UART | UART communication pin for configuration |
| DIAG | Diagnostic output (e.g., for stall detection) |
| A1, A2 | Motor coil A connections |
| B1, B2 | Motor coil B connections |
Usage Instructions
How to Use the TMC2209 in a Circuit
- Power Supply: Connect the motor power supply (V_M) to a voltage source between 4.75V and 29V. Ensure the power supply can handle the current requirements of your stepper motor.
- Logic Voltage: Connect the V_IO pin to the logic voltage of your microcontroller (3.3V or 5V).
- Motor Connections: Connect the stepper motor coils to the A1, A2, B1, and B2 pins. Ensure the wiring matches the motor's datasheet.
- Control Pins: Connect the STEP, DIR, and EN pins to the corresponding outputs of your microcontroller or motion controller.
- Microstepping: Use the MS1 and MS2 pins to set the desired microstepping resolution. Alternatively, configure microstepping via UART.
- UART Configuration: Connect the UART pin to your microcontroller for advanced configuration and real-time control. Use a UART library or software to send commands to the TMC2209.
- Cooling: If operating at high currents, attach a heatsink to the driver to prevent overheating.
Important Considerations and Best Practices
- StealthChop2 Mode: Use StealthChop2 for quiet operation, especially in 3D printing applications. Note that StealthChop2 is not ideal for high-speed motion.
- Stall Detection: Enable StallGuard™ for sensorless homing and stall detection. This feature requires proper tuning via UART.
- Current Limiting: Set the motor current limit to prevent overheating. This can be done via a potentiometer on the board or through UART.
- Decoupling Capacitors: Place decoupling capacitors close to the V_M and GND pins to reduce noise and ensure stable operation.
- Heatsink: For high-current applications, attach a heatsink to the driver to improve thermal performance.
Example: Using the TMC2209 with Arduino UNO
Below is an example of how to control the TMC2209 SilentStepStick with an Arduino UNO:
// Example code to control a stepper motor using the TMC2209 SilentStepStick
// Connect STEP, DIR, and EN pins to Arduino digital pins 2, 3, and 4 respectively.
#define STEP_PIN 2 // Pin connected to STEP
#define DIR_PIN 3 // Pin connected to DIR
#define EN_PIN 4 // Pin connected to EN
void setup() {
pinMode(STEP_PIN, OUTPUT); // Set STEP pin as output
pinMode(DIR_PIN, OUTPUT); // Set DIR pin as output
pinMode(EN_PIN, OUTPUT); // Set EN pin as output
digitalWrite(EN_PIN, LOW); // Enable the driver (active low)
digitalWrite(DIR_PIN, HIGH); // Set direction (HIGH or LOW)
}
void loop() {
// Generate step pulses to move the motor
digitalWrite(STEP_PIN, HIGH); // Set STEP pin HIGH
delayMicroseconds(500); // Wait for 500 microseconds
digitalWrite(STEP_PIN, LOW); // Set STEP pin LOW
delayMicroseconds(500); // Wait for 500 microseconds
}
Troubleshooting and FAQs
Common Issues and Solutions
Motor Not Moving:
- Check the power supply voltage and current rating.
- Verify the motor connections (A1, A2, B1, B2).
- Ensure the EN pin is set to LOW to enable the driver.
Overheating:
- Reduce the motor current limit via UART or the onboard potentiometer.
- Attach a heatsink to the driver for better thermal dissipation.
Noisy Operation:
- Enable StealthChop2 mode for quieter operation.
- Check for loose motor connections or insufficient decoupling capacitors.
Stall Detection Not Working:
- Ensure StallGuard™ is enabled and properly tuned via UART.
- Verify that the motor is not operating in StealthChop2 mode, as StallGuard™ requires SpreadCycle mode.
UART Communication Issues:
- Verify the UART wiring and baud rate settings.
- Ensure the microcontroller's UART pins are correctly configured.
FAQs
Q: Can the TMC2209 operate without UART?
A: Yes, the TMC2209 can operate in standalone mode using the STEP, DIR, and EN pins. However, UART is required for advanced features like StallGuard™ and CoolStep™.
Q: What is the maximum microstepping resolution?
A: The TMC2209 supports up to 1/256 microstepping for ultra-smooth motion.
Q: Can I use the TMC2209 with a 12V or 24V power supply?
A: Yes, the TMC2209 supports a motor power supply voltage range of 4.75V to 29V, making it compatible with 12V and 24V systems.
Q: How do I enable StealthChop2 mode?
A: StealthChop2 is enabled by default in most configurations. For advanced tuning, use UART to configure the driver.
Q: Is the TMC2209 compatible with other Trinamic drivers?
A: Yes, the TMC2209 shares a similar pinout with other Trinamic drivers, such as the TMC2208, making it easy to upgrade or replace.