How to Use HuskyLens 2 Power Board: Examples, Pinouts, and Specs
Introduction
The HuskyLens 2 Power Board by DFRobot is a power management module specifically designed for the HuskyLens 2 AI camera module. It ensures a stable and reliable power supply while offering convenient connectivity for various peripherals. This board is ideal for projects requiring consistent power delivery to the HuskyLens 2 and its associated components, such as microcontrollers, sensors, and actuators.
Explore Projects Built with HuskyLens 2 Power Board

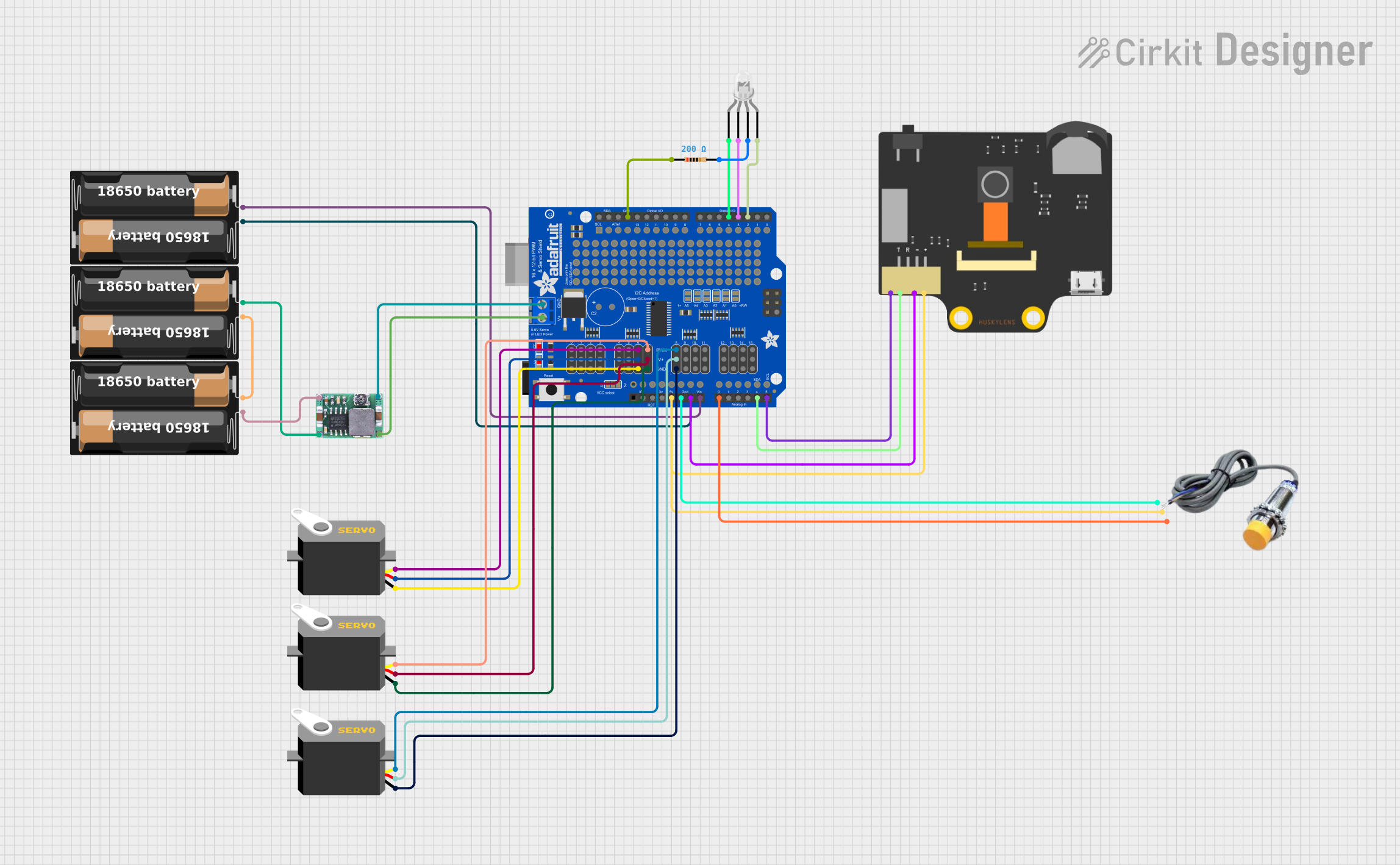
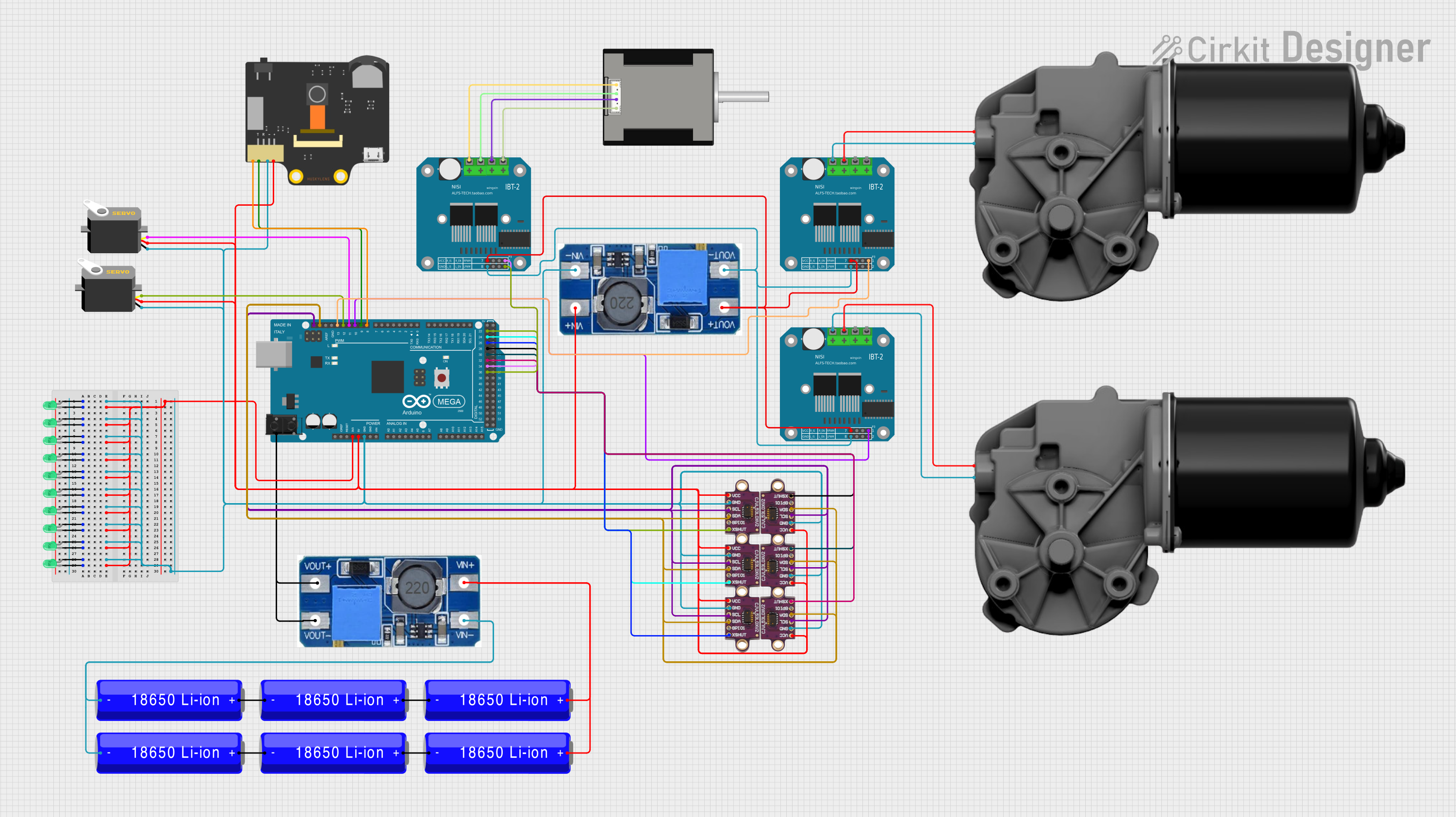
Explore Projects Built with HuskyLens 2 Power Board
Common Applications and Use Cases
- Powering the HuskyLens 2 AI camera module in robotics and AI projects.
- Providing stable power for microcontroller-based systems (e.g., Arduino, Raspberry Pi).
- Simplifying connections in IoT and machine vision applications.
- Supporting portable or battery-powered setups for AI-based projects.
Technical Specifications
The HuskyLens 2 Power Board is designed to meet the power and connectivity needs of the HuskyLens 2 module and its peripherals. Below are the key technical details:
Key Specifications
| Parameter | Value |
|---|---|
| Input Voltage Range | 5V DC (via USB-C) |
| Output Voltage | 3.3V / 5V DC (selectable) |
| Maximum Output Current | 2A |
| Power Connector Type | USB-C |
| Peripheral Connections | 4-pin Grove interface |
| Dimensions | 40mm x 30mm x 10mm |
| Weight | 10g |
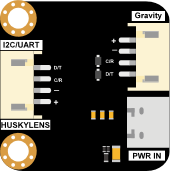
Pin Configuration and Descriptions
The HuskyLens 2 Power Board features a simple pinout for easy integration with the HuskyLens 2 module and other peripherals.
Grove Interface Pinout
| Pin Name | Description |
|---|---|
| VCC | Power output (3.3V or 5V, selectable) |
| GND | Ground |
| SDA | I2C Data Line |
| SCL | I2C Clock Line |
USB-C Port
| Pin Name | Description |
|---|---|
| VBUS | 5V Power Input |
| GND | Ground |
Usage Instructions
The HuskyLens 2 Power Board is straightforward to use and integrates seamlessly with the HuskyLens 2 AI camera module. Follow the steps below to set up and use the board:
Step 1: Powering the Board
- Connect a 5V DC power source to the USB-C port of the power board.
- Ensure the power source can supply at least 2A to avoid power instability.
Step 2: Connecting the HuskyLens 2 Module
- Use the 4-pin Grove cable to connect the HuskyLens 2 module to the Grove interface on the power board.
- Ensure the VCC and GND pins are correctly aligned to avoid damage.
Step 3: Selecting Output Voltage
- Use the onboard voltage selection jumper to choose between 3.3V and 5V output.
- Set the jumper to match the voltage requirements of your connected peripherals.
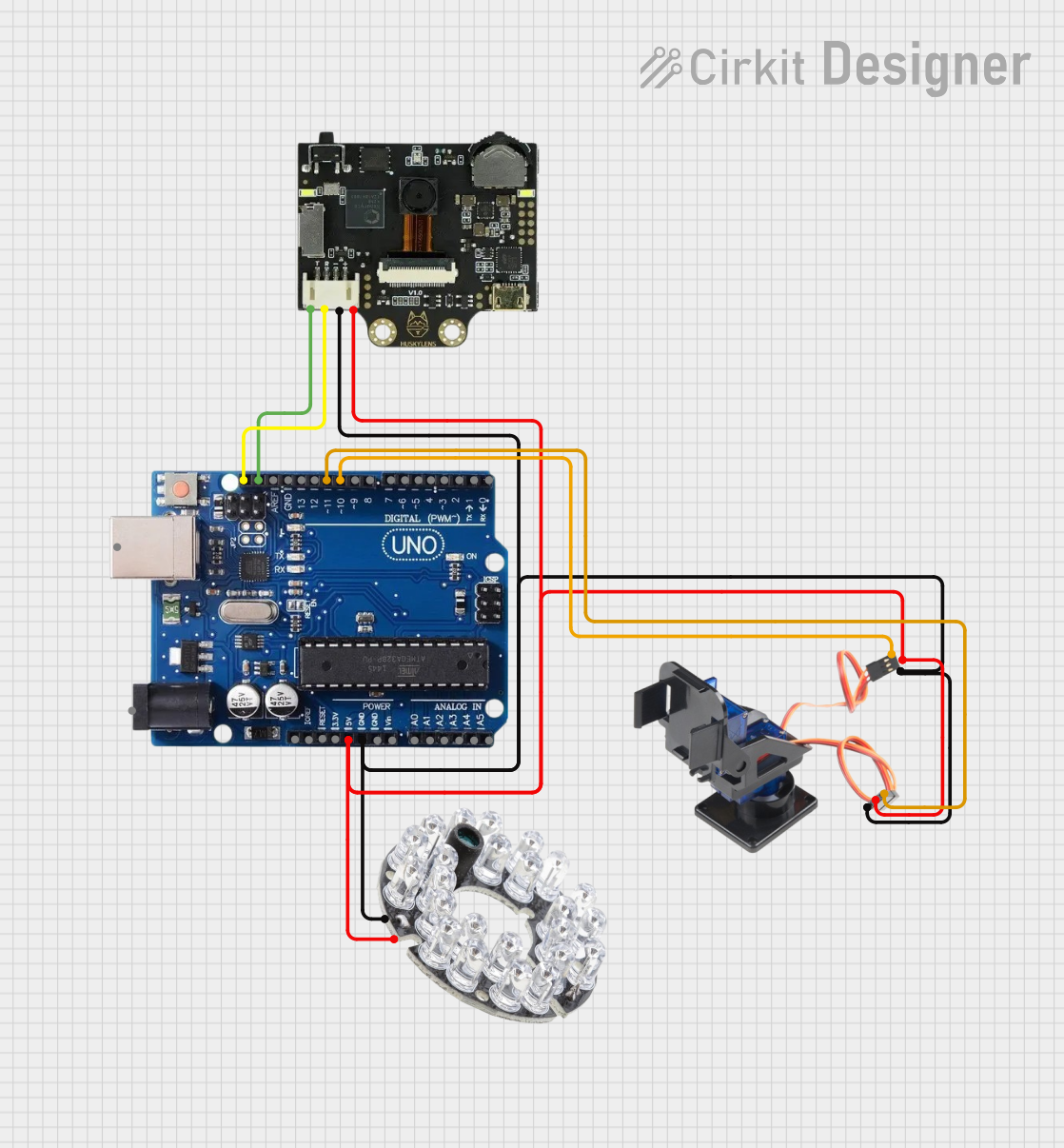
Step 4: Integrating with an Arduino UNO
The HuskyLens 2 Power Board can be connected to an Arduino UNO for AI-based projects. Below is an example code snippet to interface the HuskyLens 2 module with the Arduino UNO:
#include <Wire.h>
// Define the I2C address of the HuskyLens 2 module
#define HUSKYLENS_I2C_ADDRESS 0x32
void setup() {
Wire.begin(); // Initialize I2C communication
Serial.begin(9600); // Start serial communication for debugging
// Check if the HuskyLens 2 module is connected
Wire.beginTransmission(HUSKYLENS_I2C_ADDRESS);
if (Wire.endTransmission() == 0) {
Serial.println("HuskyLens 2 module detected!");
} else {
Serial.println("Error: HuskyLens 2 module not detected.");
}
}
void loop() {
// Example: Request data from the HuskyLens 2 module
Wire.requestFrom(HUSKYLENS_I2C_ADDRESS, 6); // Request 6 bytes of data
while (Wire.available()) {
char c = Wire.read(); // Read each byte
Serial.print(c); // Print the received data
}
delay(1000); // Wait for 1 second before the next request
}
Best Practices
- Always verify the voltage requirements of your peripherals before connecting them to the power board.
- Use a high-quality USB-C cable and power adapter to ensure stable power delivery.
- Avoid short circuits by carefully aligning the Grove connector pins.
Troubleshooting and FAQs
Common Issues and Solutions
HuskyLens 2 module not powering on:
- Ensure the USB-C power source is providing at least 5V and 2A.
- Check the Grove cable connection for proper alignment.
Peripheral devices not receiving power:
- Verify the voltage selection jumper is set to the correct output voltage (3.3V or 5V).
- Inspect the Grove cable for any damage or loose connections.
I2C communication errors:
- Confirm the SDA and SCL lines are correctly connected.
- Check for address conflicts if multiple I2C devices are connected.
FAQs
Q: Can I use a battery pack to power the HuskyLens 2 Power Board?
A: Yes, as long as the battery pack provides a stable 5V output via USB-C and can supply at least 2A.
Q: Is the power board compatible with other Grove modules?
A: Yes, the Grove interface on the power board can be used with other Grove-compatible modules, provided they operate at 3.3V or 5V.
Q: How do I know if the power board is working correctly?
A: The onboard LED indicator will light up when the board is powered and functioning properly.
By following this documentation, you can effectively use the HuskyLens 2 Power Board in your projects and troubleshoot any issues that may arise.