How to Use XT60 Power Distribution Board: Examples, Pinouts, and Specs
Introduction
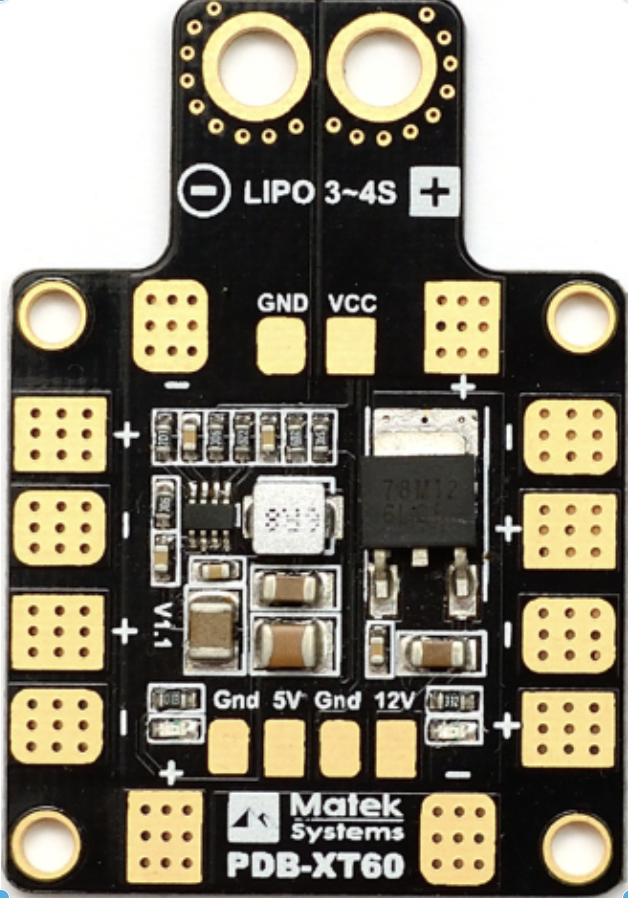
The XT60 Power Distribution Board (PDB-XT60) by Matek is a versatile and efficient device designed to distribute electrical power from a single source to multiple components in a circuit. This component is particularly popular in RC models and drones, where reliable and secure power distribution is crucial. The PDB-XT60 features XT60 connectors, ensuring a robust and efficient power transfer.
Explore Projects Built with XT60 Power Distribution Board

Explore Projects Built with XT60 Power Distribution Board
Technical Specifications
Key Technical Details
| Parameter | Specification |
|---|---|
| Manufacturer | Matek |
| Part ID | PDB-XT60 |
| Input Voltage | 3S-6S LiPo (11.1V - 22.2V) |
| Max Current | 60A continuous, 120A peak |
| Output Voltage | Same as input voltage |
| Dimensions | 36mm x 50mm |
| Weight | 10g |
| Connectors | XT60 for input, solder pads for output |
Pin Configuration and Descriptions
| Pin/Pad | Description |
|---|---|
| XT60 Input | Connects to the power source (battery) |
| Solder Pads (1-6) | Connects to various components (ESCs, etc.) |
| Ground Pads | Common ground for all components |
Usage Instructions
How to Use the Component in a Circuit
Connect the Power Source:
- Solder the XT60 connector to the input pads of the PDB-XT60. Ensure a secure and solid connection to handle high currents.
Connect Components:
- Solder the power leads of your components (e.g., ESCs, flight controllers) to the output solder pads on the PDB-XT60. Ensure correct polarity to avoid damage.
Mounting:
- Secure the PDB-XT60 in your RC model or drone using appropriate mounting hardware. Ensure it is placed in a location that minimizes vibration and physical stress.
Important Considerations and Best Practices
Heat Management:
- Ensure adequate ventilation around the PDB-XT60 to prevent overheating, especially when operating at high currents.
Polarity Check:
- Double-check the polarity of all connections before powering up to avoid damaging your components.
Soldering Quality:
- Use high-quality solder and ensure all connections are solid and free of cold joints.
Insulation:
- Insulate exposed solder joints to prevent short circuits.
Troubleshooting and FAQs
Common Issues Users Might Face
No Power to Components:
- Solution: Check all connections for continuity. Ensure the XT60 connector is securely connected to the power source.
Overheating:
- Solution: Ensure adequate ventilation and check for any short circuits. Verify that the current draw does not exceed the board's specifications.
Intermittent Power Loss:
- Solution: Inspect solder joints for cold joints or cracks. Re-solder if necessary.
FAQs
Q: Can I use the PDB-XT60 with a 4S LiPo battery? A: Yes, the PDB-XT60 supports 3S-6S LiPo batteries, including 4S (14.8V).
Q: How do I know if my connections are secure? A: Perform a continuity test with a multimeter to ensure all connections are solid. Visually inspect solder joints for any signs of poor connection.
Q: Can I connect more than six components to the PDB-XT60? A: The PDB-XT60 has six output pads. If you need to connect more components, consider using additional distribution boards or a custom wiring solution.
Example Code for Arduino UNO
While the PDB-XT60 itself does not directly interface with an Arduino UNO, it can be used to power components that do. Below is an example of how to power an Arduino UNO and a motor using the PDB-XT60.
/*
* Example code to control a motor using Arduino UNO
* powered by the PDB-XT60.
*/
const int motorPin = 9; // Pin connected to the motor driver
void setup() {
pinMode(motorPin, OUTPUT); // Set motor pin as output
}
void loop() {
digitalWrite(motorPin, HIGH); // Turn the motor on
delay(1000); // Wait for 1 second
digitalWrite(motorPin, LOW); // Turn the motor off
delay(1000); // Wait for 1 second
}
In this setup, the PDB-XT60 distributes power from a LiPo battery to both the Arduino UNO and the motor. Ensure that the motor driver is properly connected to the PDB-XT60 and the Arduino UNO.
By following this documentation, users can effectively utilize the XT60 Power Distribution Board (PDB-XT60) in their projects, ensuring reliable and efficient power distribution.