How to Use MRB Planetary gearbox motor: Examples, Pinouts, and Specs

Introduction
The MRB Planetary Gearbox Motor is a high-efficiency motor equipped with a planetary gearbox, designed to provide high torque output in a compact form factor. This motor is ideal for applications requiring precise motion control and significant torque, such as robotics, automation systems, and industrial equipment.
Explore Projects Built with MRB Planetary gearbox motor
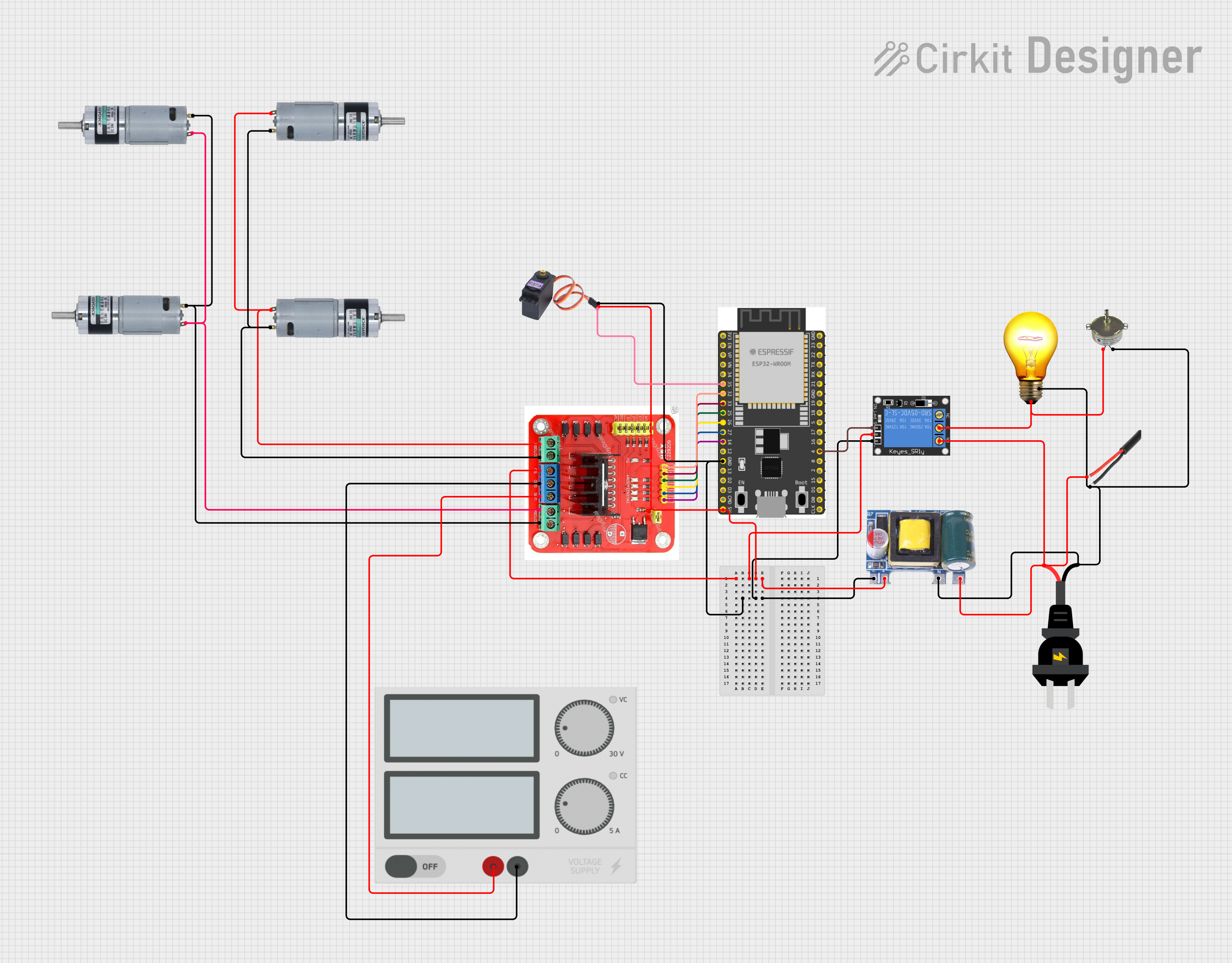
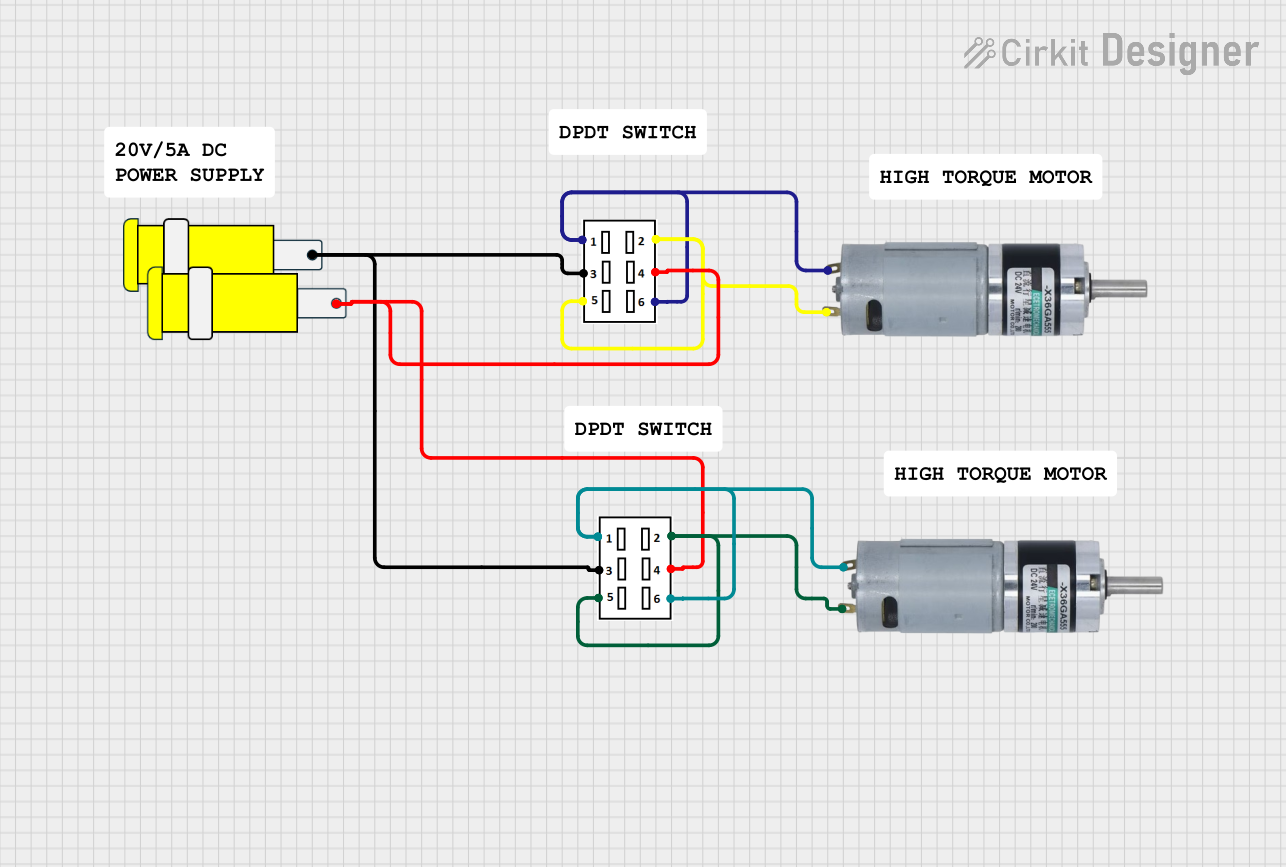
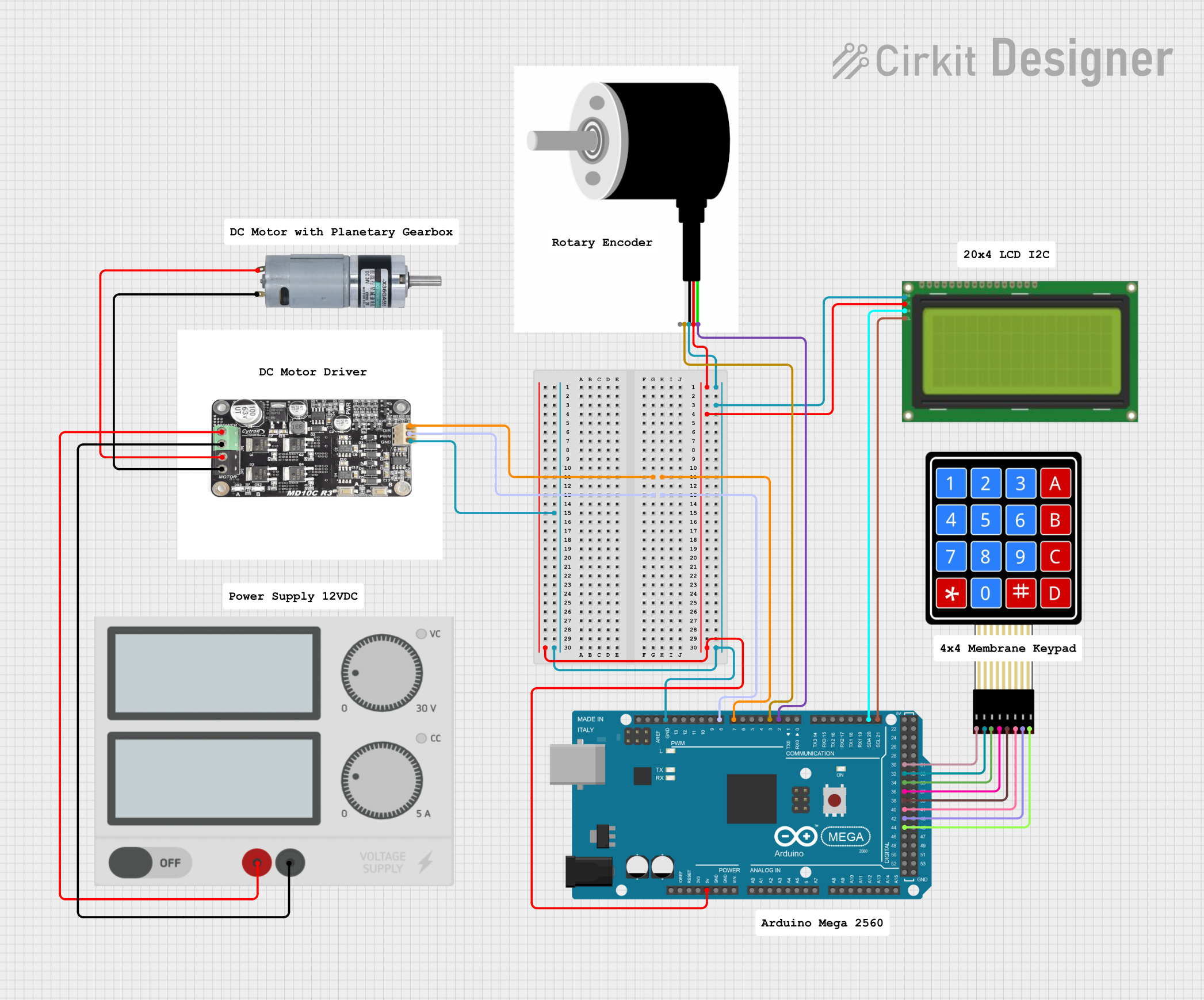

Explore Projects Built with MRB Planetary gearbox motor
Common Applications and Use Cases
- Robotic arms and manipulators
- Automated guided vehicles (AGVs)
- Precision machinery
- Conveyor systems
- Actuators in aerospace and defense
Technical Specifications
Key Technical Details
| Specification | Value | Description |
|---|---|---|
| Voltage Range | X - Y V | The operating voltage range of the motor. |
| Nominal Voltage | Z V | The voltage at which the motor performs optimally. |
| No-Load Speed | A RPM | The speed of the motor shaft without load. |
| Rated Torque | B Nm | The maximum continuous torque. |
| Stall Torque | C Nm | The torque at which the motor stalls. |
| Gear Ratio | D:1 | The ratio of the gearbox. |
| Efficiency | E% | The efficiency of the motor. |
| Weight | F grams | The weight of the motor. |
Note: Replace X, Y, Z, A, B, C, D, E, F with the actual values for the MRB Planetary Gearbox Motor.
Pin Configuration and Descriptions
| Pin Number | Name | Description |
|---|---|---|
| 1 | V+ | Positive voltage supply to the motor. |
| 2 | GND | Ground connection for the motor. |
| 3 | Control 1 | Control input for motor direction/speed. |
| 4 | Control 2 | Control input for motor direction/speed. |
Note: The control inputs are typically used with a motor driver or controller to manage the direction and speed of the motor.
Usage Instructions
How to Use the Component in a Circuit
- Connect the V+ and GND pins to a power supply that matches the motor's voltage rating.
- Use a motor driver compatible with the motor's current and voltage requirements.
- Connect the motor driver's output to the Control 1 and Control 2 pins.
- Ensure that the motor is securely mounted to prevent damage from vibration or torque.
Important Considerations and Best Practices
- Do not exceed the voltage rating as it may damage the motor.
- Use a motor driver with overcurrent protection to prevent damage from stall conditions.
- Incorporate an encoder if precise position control is required.
- Allow for adequate ventilation to prevent overheating during prolonged use.
Troubleshooting and FAQs
Common Issues
- Motor not turning: Check power supply and connections to the motor driver.
- Insufficient torque: Ensure the power supply is adequate and the motor is not overloaded.
- Overheating: Verify that the motor is not stalled and that there is sufficient cooling.
Solutions and Tips
- Always double-check wiring, especially if the motor behaves unexpectedly.
- Use a multimeter to verify the power supply voltage and motor driver outputs.
- If the motor stalls, reduce the load or increase the gear ratio for more torque.
FAQs
Q: Can I run the motor at a higher voltage for more power? A: Operating the motor above the recommended voltage can lead to overheating and damage.
Q: How do I reverse the motor's direction? A: Swap the connections on Control 1 and Control 2 to reverse the motor's direction.
Q: What is the lifespan of the gearbox? A: The lifespan depends on the operating conditions, but planetary gearboxes are generally durable due to their load distribution.
Example Arduino UNO Code
Below is an example code snippet for controlling an MRB Planetary Gearbox Motor with an Arduino UNO and a generic motor driver.
// Define motor control pins
const int controlPin1 = 2; // Control 1 pin
const int controlPin2 = 3; // Control 2 pin
void setup() {
// Set motor control pins as outputs
pinMode(controlPin1, OUTPUT);
pinMode(controlPin2, OUTPUT);
}
void loop() {
// Rotate motor in one direction
digitalWrite(controlPin1, HIGH);
digitalWrite(controlPin2, LOW);
delay(1000); // Run for 1 second
// Stop motor
digitalWrite(controlPin1, LOW);
digitalWrite(controlPin2, LOW);
delay(1000); // Stop for 1 second
// Rotate motor in the opposite direction
digitalWrite(controlPin1, LOW);
digitalWrite(controlPin2, HIGH);
delay(1000); // Run for 1 second
// Stop motor
digitalWrite(controlPin1, LOW);
digitalWrite(controlPin2, LOW);
delay(1000); // Stop for 1 second
}
Note: This code assumes the use of a simple motor driver with two control inputs. If using a more complex driver or a driver with enable/pulse inputs, the code will need to be adjusted accordingly.
Remember to consult the motor driver's datasheet for specific wiring and control details.