How to Use BLDC motor: Examples, Pinouts, and Specs
Introduction
A Brushless DC (BLDC) motor is an electric motor that operates without brushes, using electronic commutation instead. Unlike traditional brushed motors, BLDC motors rely on electronic controllers to switch the current in the motor windings, ensuring smooth and efficient operation. These motors are known for their high efficiency, reliability, and low maintenance, making them ideal for applications in robotics, electric vehicles, drones, HVAC systems, and various industrial machines.
Explore Projects Built with BLDC motor
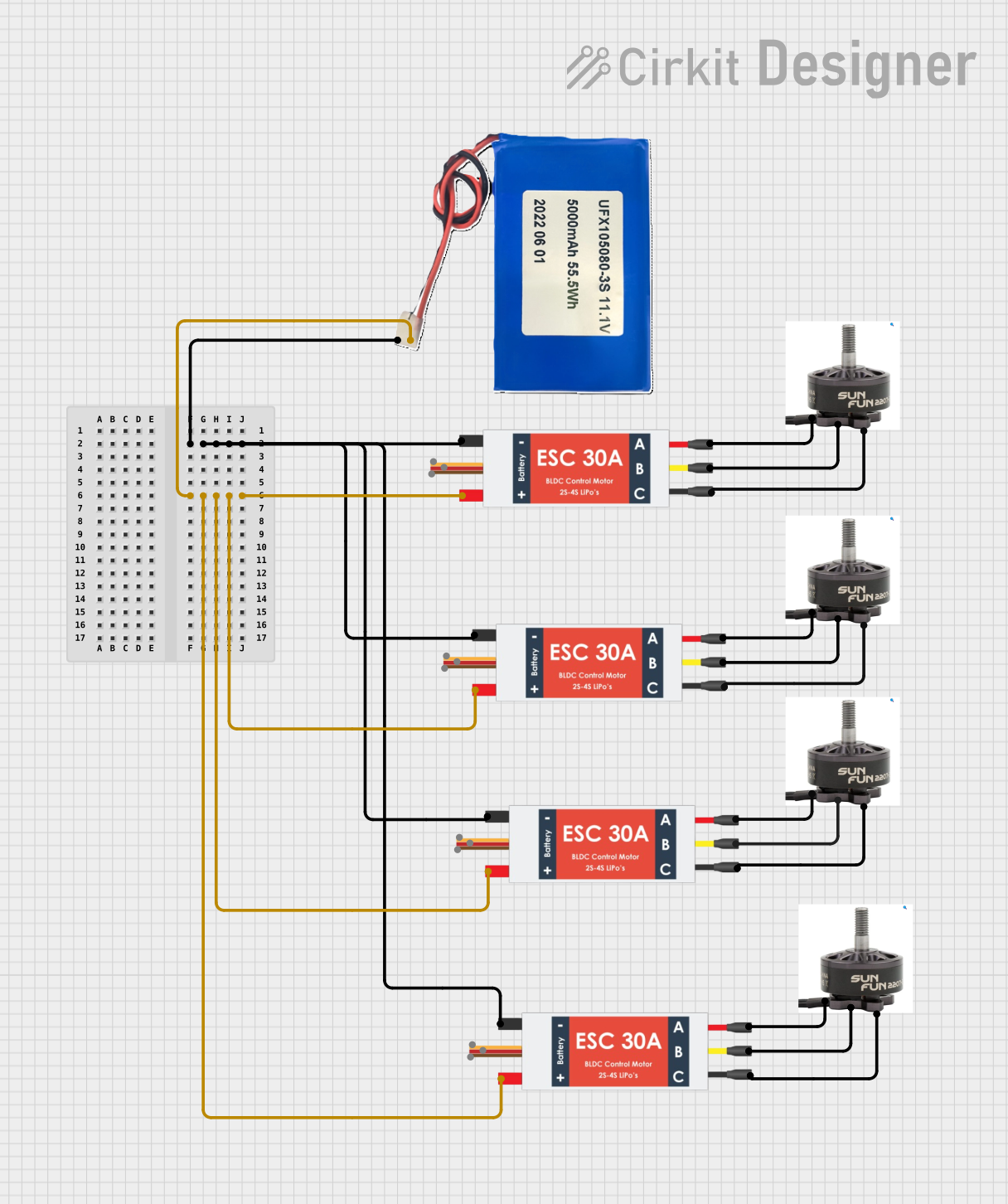
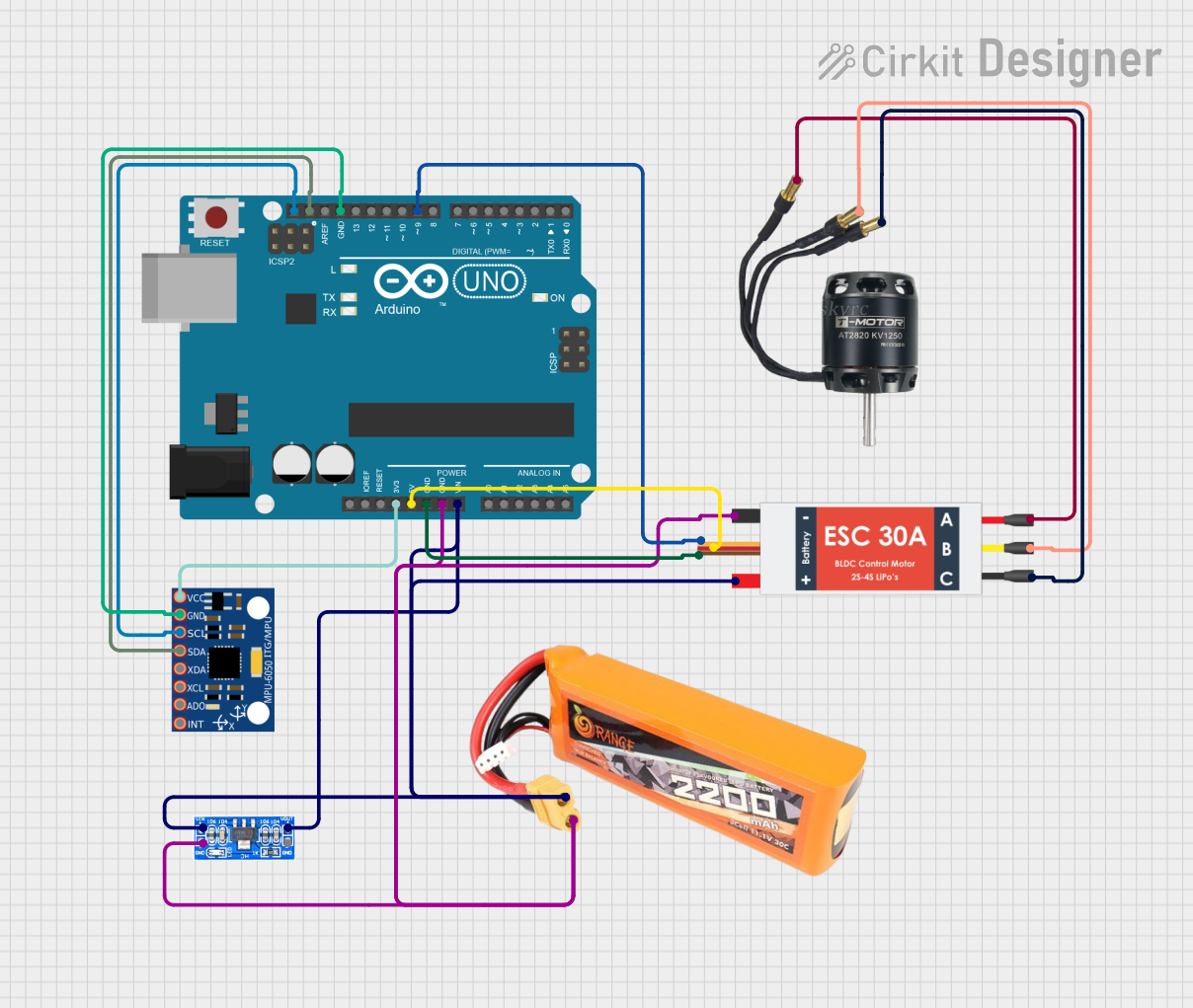

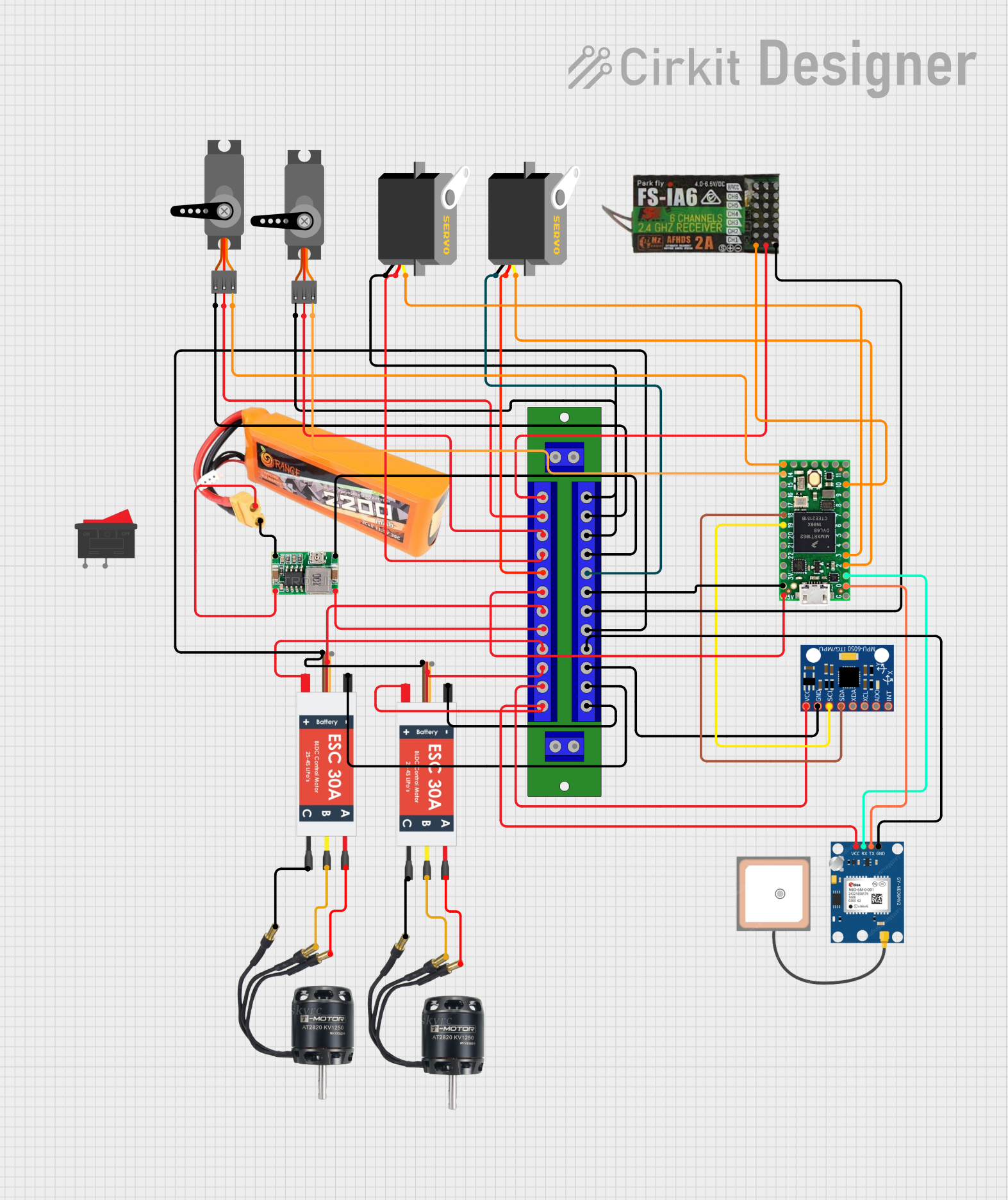
Explore Projects Built with BLDC motor
Technical Specifications
Below are the general technical specifications for a typical BLDC motor. Note that specific values may vary depending on the model and manufacturer.
General Specifications
| Parameter | Typical Range/Value |
|---|---|
| Operating Voltage | 12V - 48V |
| Rated Power | 10W - 10kW |
| Speed Range | 1,000 - 20,000 RPM |
| Torque Range | 0.01 Nm - 10 Nm |
| Efficiency | 85% - 95% |
| Number of Poles | 2 - 14 |
| Commutation Type | Electronic (Hall sensors or sensorless) |
Pin Configuration (for BLDC motors with Hall sensors)
| Pin Number | Pin Name | Description |
|---|---|---|
| 1 | Phase A | Connection to motor winding A |
| 2 | Phase B | Connection to motor winding B |
| 3 | Phase C | Connection to motor winding C |
| 4 | Hall Sensor A | Output from Hall sensor A |
| 5 | Hall Sensor B | Output from Hall sensor B |
| 6 | Hall Sensor C | Output from Hall sensor C |
| 7 | Vcc | Power supply for Hall sensors (typically 5V) |
| 8 | GND | Ground connection for Hall sensors |
Usage Instructions
How to Use the BLDC Motor in a Circuit
- Power Supply: Ensure the motor is powered with the correct voltage and current as specified by the manufacturer. Use a regulated DC power supply or battery.
- Motor Driver/Controller: A BLDC motor requires a motor driver or controller to operate. The controller manages the commutation process and regulates speed and direction.
- For motors with Hall sensors, connect the Hall sensor outputs to the controller.
- For sensorless motors, ensure the controller supports sensorless operation.
- Connections:
- Connect the motor windings (Phase A, B, C) to the corresponding outputs on the motor driver.
- If using Hall sensors, connect the Hall sensor pins (A, B, C, Vcc, GND) to the controller.
- Control Signal: Provide a control signal (e.g., PWM) to the motor driver to adjust speed and direction.
Important Considerations and Best Practices
- Heat Management: BLDC motors can generate heat during operation. Ensure proper ventilation or use a heatsink if necessary.
- Current Limiting: Use a motor driver with current-limiting features to prevent damage to the motor.
- Startup Torque: Sensorless BLDC motors may require a specific startup sequence to generate initial torque.
- Noise Reduction: Use capacitors or filters to minimize electrical noise in the circuit.
Example: Controlling a BLDC Motor with Arduino UNO
Below is an example of controlling a BLDC motor using an Arduino UNO and an ESC (Electronic Speed Controller).
// Example: Controlling a BLDC motor with Arduino UNO and ESC
#include <Servo.h> // Include the Servo library to control the ESC
Servo esc; // Create a Servo object to control the ESC
void setup() {
esc.attach(9); // Attach the ESC signal wire to pin 9 on Arduino
esc.writeMicroseconds(1000); // Send minimum throttle signal to initialize ESC
delay(2000); // Wait for ESC to initialize
}
void loop() {
esc.writeMicroseconds(1500); // Set throttle to 50% (1500 µs)
delay(5000); // Run motor at 50% throttle for 5 seconds
esc.writeMicroseconds(1000); // Stop the motor (minimum throttle)
delay(5000); // Wait for 5 seconds before restarting
}
Notes:
- Ensure the ESC is compatible with the BLDC motor and power supply.
- Calibrate the ESC if required (refer to the ESC documentation).
Troubleshooting and FAQs
Common Issues and Solutions
Motor Does Not Spin:
- Check all connections, especially the motor windings and Hall sensor wires.
- Ensure the power supply voltage matches the motor's requirements.
- Verify that the motor driver/controller is functioning correctly.
Motor Vibrates but Does Not Rotate:
- This may indicate incorrect phase wiring. Swap any two phase wires and test again.
- For sensorless motors, ensure the controller is configured for sensorless operation.
Overheating:
- Check for excessive current draw. Use a current-limiting motor driver.
- Ensure proper ventilation or cooling for the motor.
No Response from ESC:
- Verify that the ESC is receiving a valid PWM signal from the Arduino.
- Ensure the ESC is properly calibrated and initialized.
FAQs
Q: Can I run a BLDC motor without a controller?
A: No, a BLDC motor requires a controller to manage the commutation process. Without a controller, the motor cannot operate.
Q: What is the difference between a sensored and sensorless BLDC motor?
A: Sensored BLDC motors use Hall sensors to detect rotor position, enabling precise control. Sensorless motors rely on back-EMF signals for commutation, which may result in less precise control at low speeds.
Q: How do I reverse the direction of a BLDC motor?
A: To reverse the motor's direction, swap any two of the three phase wires (A, B, C) connected to the motor driver.
Q: Can I use a BLDC motor for regenerative braking?
A: Yes, many BLDC motor controllers support regenerative braking, which allows the motor to act as a generator and feed energy back into the power source.
Q: What is the lifespan of a BLDC motor?
A: BLDC motors have a long lifespan due to the absence of brushes, typically lasting tens of thousands of hours with proper maintenance.