How to Use BTS7960: Examples, Pinouts, and Specs
Introduction
The BTS7960 is a high-current H-bridge motor driver IC designed for controlling DC motors. It is capable of handling up to 43A of continuous current, making it suitable for high-power applications. The device is widely used in robotics, automation, and industrial motor control systems due to its efficiency and robust design. Additionally, the BTS7960 includes built-in protection mechanisms such as over-temperature and over-current protection, ensuring reliable operation in demanding environments.
Explore Projects Built with BTS7960
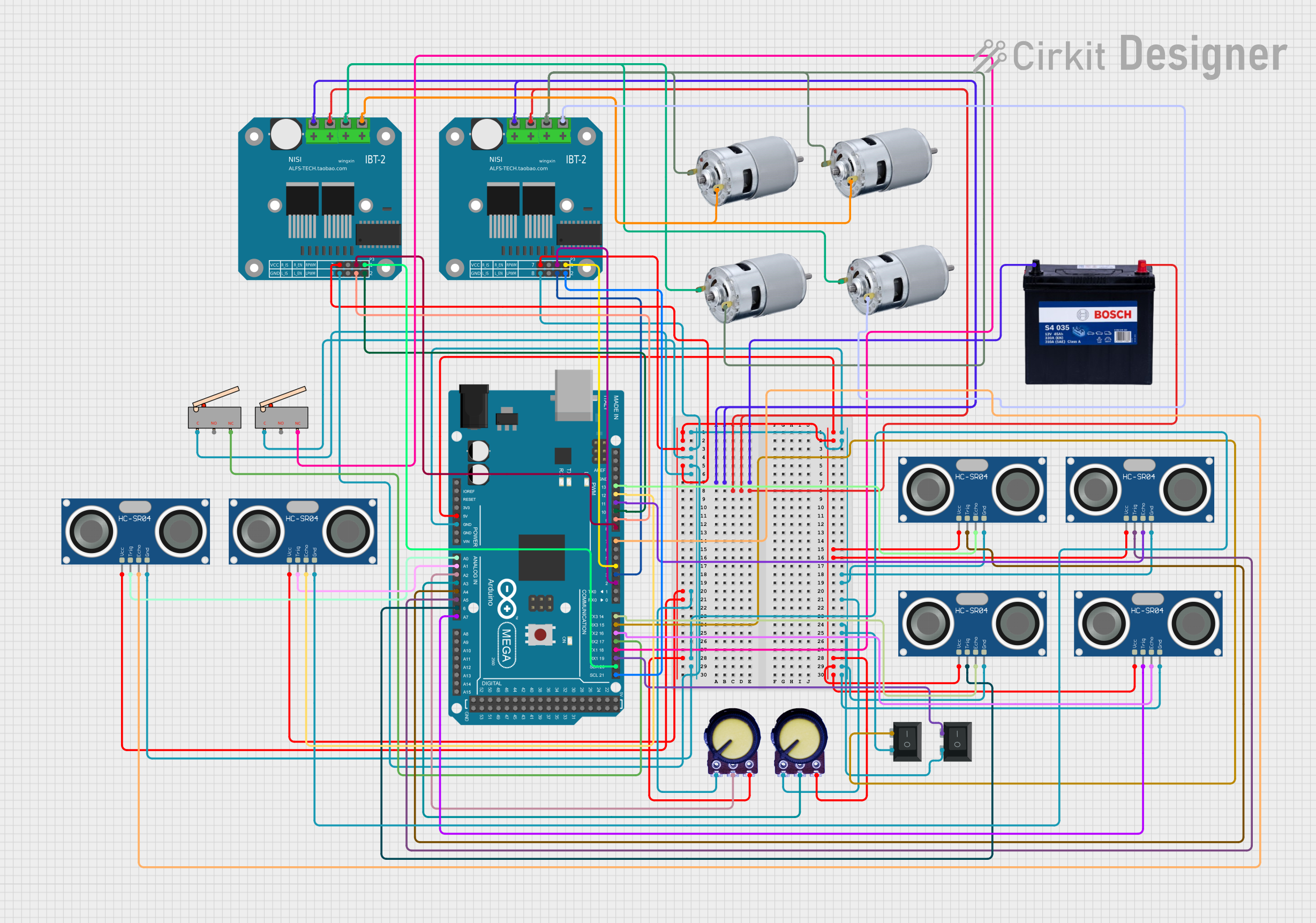
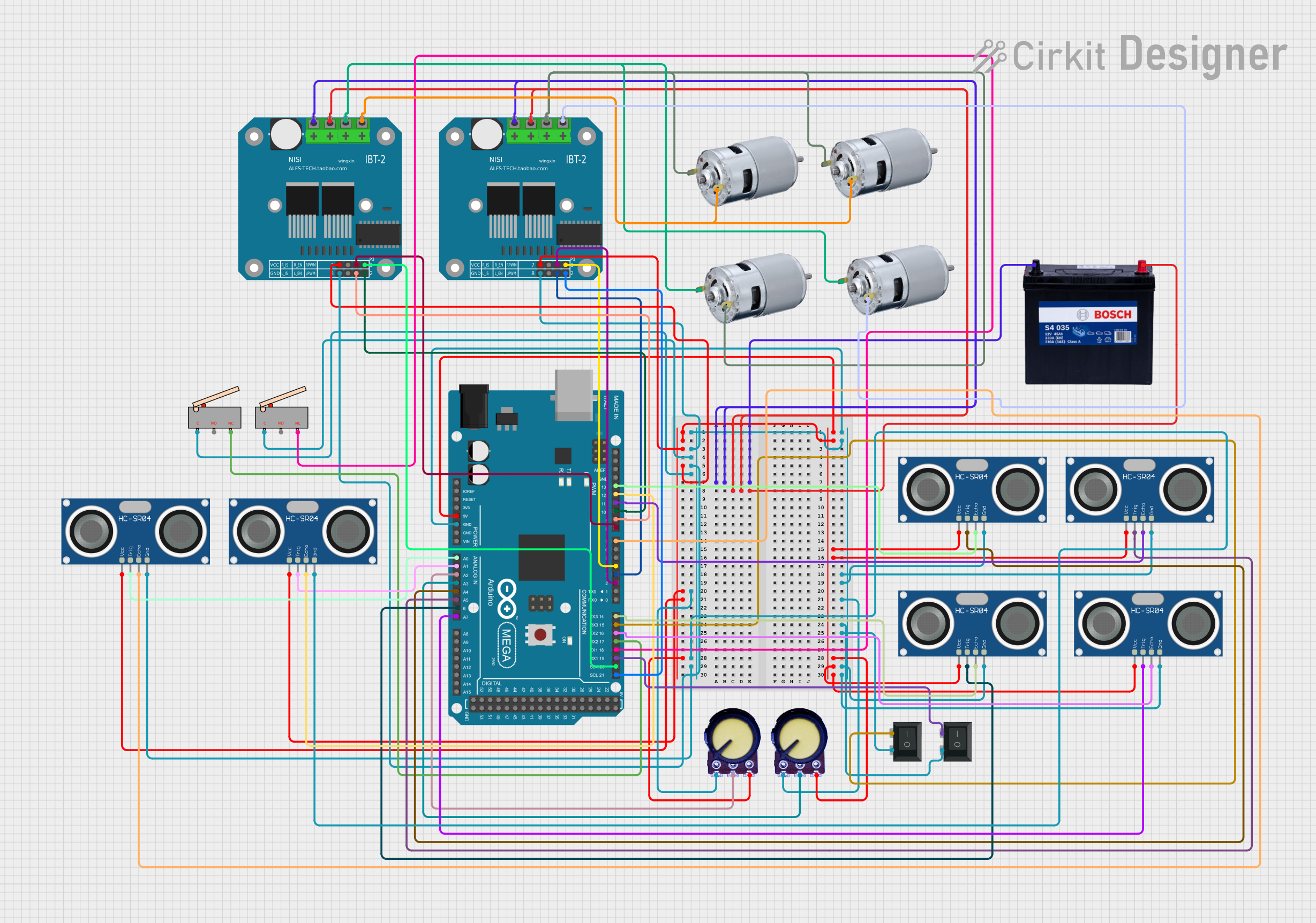
Explore Projects Built with BTS7960
Common Applications
- Robotics (e.g., controlling robot wheels or arms)
- Industrial automation systems
- Electric vehicle motor control
- Conveyor belt systems
- High-power DC motor control in hobbyist projects
Technical Specifications
The BTS7960 is a powerful motor driver with the following key specifications:
| Parameter | Value |
|---|---|
| Operating Voltage Range | 5.5V to 27V |
| Continuous Current Rating | Up to 43A |
| Peak Current Rating | 50A |
| PWM Frequency | Up to 25kHz |
| Logic Input Voltage | 3.3V or 5V (TTL compatible) |
| Over-Temperature Protection | Yes |
| Over-Current Protection | Yes |
| Dimensions (Module) | 43mm x 45mm x 28mm |
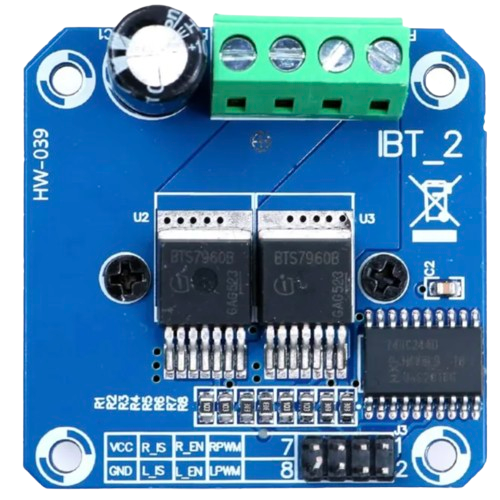
Pin Configuration and Descriptions
The BTS7960 module typically comes with the following pins:
| Pin Name | Description |
|---|---|
| VCC | Power supply for the motor (5.5V to 27V). |
| GND | Ground connection. |
| RPWM | Right PWM input signal for controlling motor direction and speed. |
| LPWM | Left PWM input signal for controlling motor direction and speed. |
| R_EN | Enable pin for the right side of the H-bridge. |
| L_EN | Enable pin for the left side of the H-bridge. |
| IS | Current sensing output (optional, used for monitoring motor current). |
| Motor+ | Positive terminal of the motor. |
| Motor- | Negative terminal of the motor. |
Usage Instructions
How to Use the BTS7960 in a Circuit
- Power Supply: Connect the VCC pin to a power source that matches the motor's voltage requirements (5.5V to 27V). Ensure the power supply can provide sufficient current for the motor.
- Motor Connection: Connect the motor terminals to the Motor+ and Motor- pins.
- Logic Inputs: Use the RPWM and LPWM pins to control the motor's speed and direction. These pins accept PWM signals from a microcontroller (e.g., Arduino).
- Enable Pins: Set the R_EN and L_EN pins HIGH to enable the respective sides of the H-bridge.
- Ground: Connect the GND pin to the ground of the power supply and the microcontroller.
Important Considerations
- Use a heat sink or active cooling if operating at high currents for extended periods.
- Ensure proper decoupling capacitors are used near the VCC pin to reduce noise and voltage spikes.
- Avoid exceeding the voltage and current ratings to prevent damage to the module.
- Use appropriate fuses or circuit breakers for additional protection.
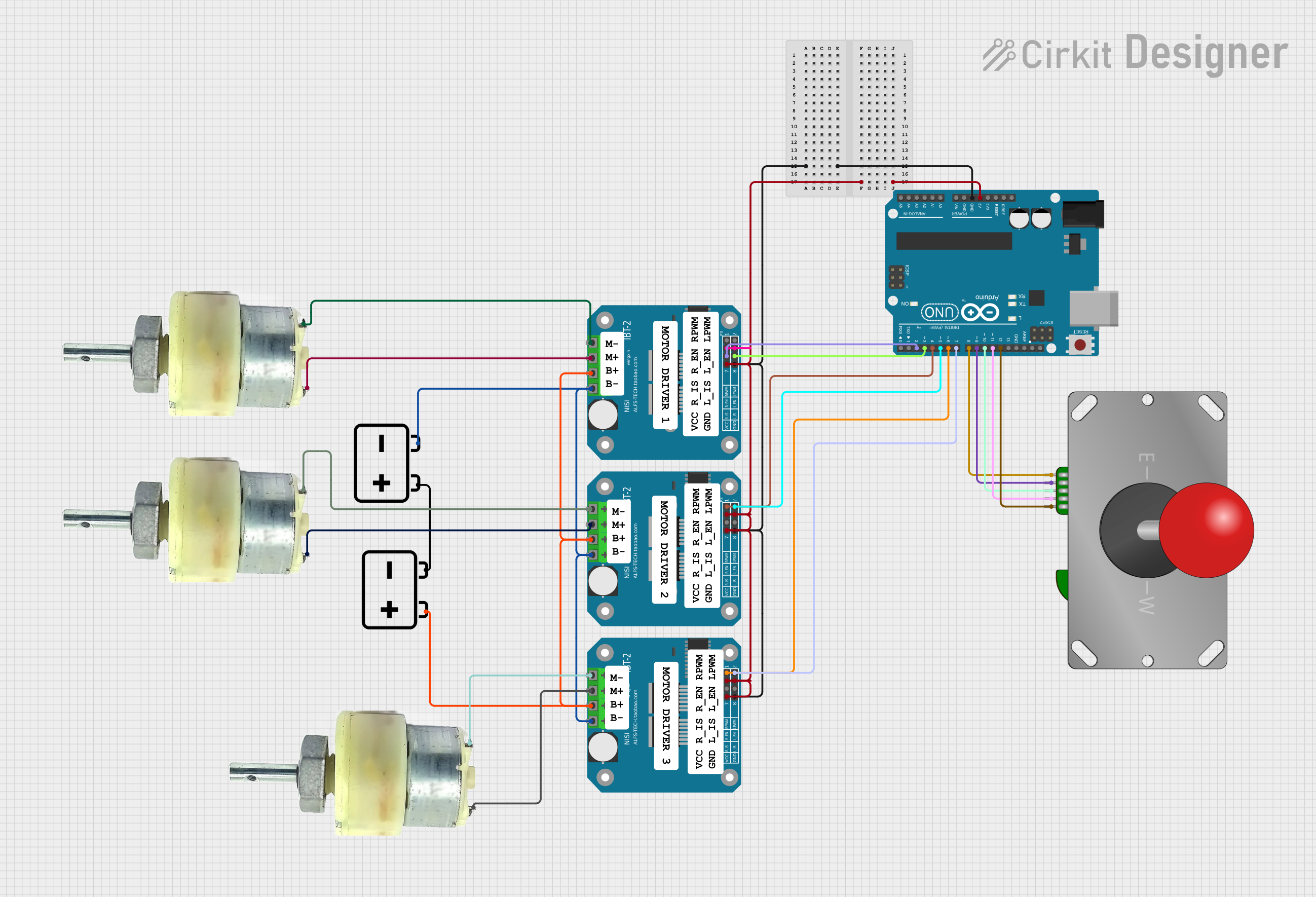
Example: Connecting BTS7960 to an Arduino UNO
Below is an example of how to control a DC motor using the BTS7960 and an Arduino UNO:
Circuit Connections
- Connect the BTS7960's VCC and GND to the motor power supply.
- Connect Motor+ and Motor- to the DC motor terminals.
- Connect RPWM and LPWM to Arduino PWM pins (e.g., pins 5 and 6).
- Connect R_EN and L_EN to Arduino digital pins (e.g., pins 7 and 8).
- Connect the BTS7960's GND to the Arduino's GND.
Arduino Code
// Define pins for BTS7960 connections
const int RPWM = 5; // Right PWM pin
const int LPWM = 6; // Left PWM pin
const int R_EN = 7; // Right enable pin
const int L_EN = 8; // Left enable pin
void setup() {
// Set pin modes
pinMode(RPWM, OUTPUT);
pinMode(LPWM, OUTPUT);
pinMode(R_EN, OUTPUT);
pinMode(L_EN, OUTPUT);
// Enable both sides of the H-bridge
digitalWrite(R_EN, HIGH);
digitalWrite(L_EN, HIGH);
}
void loop() {
// Example: Rotate motor forward at 50% speed
analogWrite(RPWM, 128); // 50% duty cycle
analogWrite(LPWM, 0); // No signal to LPWM
delay(2000); // Run for 2 seconds
// Example: Rotate motor backward at 75% speed
analogWrite(RPWM, 0); // No signal to RPWM
analogWrite(LPWM, 192); // 75% duty cycle
delay(2000); // Run for 2 seconds
// Stop the motor
analogWrite(RPWM, 0);
analogWrite(LPWM, 0);
delay(2000); // Wait for 2 seconds
}
Best Practices
- Use PWM signals with a frequency below 25kHz for optimal performance.
- Ensure the motor's current rating does not exceed the BTS7960's maximum continuous current rating.
- Test the circuit with a lower current motor before using high-power motors.
Troubleshooting and FAQs
Common Issues and Solutions
Motor Not Running
- Cause: Incorrect wiring or insufficient power supply.
- Solution: Double-check all connections and ensure the power supply meets the motor's requirements.
Overheating
- Cause: Prolonged operation at high currents without proper cooling.
- Solution: Add a heat sink or active cooling to the BTS7960 module.
Erratic Motor Behavior
- Cause: Noise or insufficient decoupling.
- Solution: Add decoupling capacitors near the VCC pin and ensure proper grounding.
Arduino Not Controlling the Motor
- Cause: Incorrect logic level or pin configuration.
- Solution: Verify the Arduino code and ensure the RPWM and LPWM pins are connected to PWM-capable pins.
FAQs
Can the BTS7960 drive stepper motors?
- No, the BTS7960 is designed for DC motors and cannot directly control stepper motors.
What is the purpose of the IS pin?
- The IS pin provides a current sensing output, which can be used to monitor the motor's current draw.
Can I use the BTS7960 with a 3.3V microcontroller?
- Yes, the logic inputs are compatible with both 3.3V and 5V signals.
What happens if the motor draws more than 43A?
- The BTS7960's over-current protection will activate, shutting down the output to protect the module.
By following this documentation, you can effectively use the BTS7960 motor driver in your projects.