How to Use AM32 esc brushless 60 amp: Examples, Pinouts, and Specs
Introduction
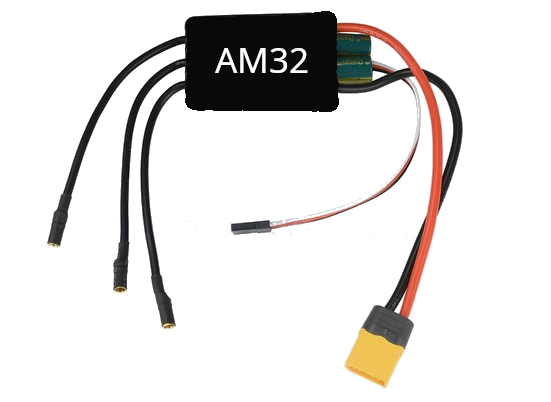
The AM32 ESC (Electronic Speed Controller) is a high-performance controller designed for brushless motors, capable of delivering up to 60 amps of continuous current. It is widely used in applications requiring precise motor control, such as remote-controlled (RC) vehicles, drones, and robotics. The AM32 ESC ensures smooth motor operation, efficient power management, and reliable performance under demanding conditions.
Explore Projects Built with AM32 esc brushless 60 amp


Explore Projects Built with AM32 esc brushless 60 amp
Common Applications
- RC cars, boats, and airplanes
- Multirotor drones and quadcopters
- Robotics and automation systems
- Electric skateboards and scooters
Technical Specifications
The AM32 ESC is engineered to provide robust and efficient motor control. Below are its key technical details:
General Specifications
| Parameter | Value |
|---|---|
| Continuous Current | 60A |
| Peak Current | 80A (for short durations) |
| Input Voltage Range | 2S–6S LiPo (7.4V–22.2V) |
| Motor Compatibility | Brushless motors (BLDC) |
| Firmware | AM32 (open-source firmware) |
| Signal Input | PWM, DShot, or Multishot |
| BEC Output | None |
| Dimensions | Varies by model (e.g., 45x25x10 mm) |
| Weight | ~25g |
Pin Configuration and Descriptions
The AM32 ESC typically has the following pin connections:
| Pin Name | Description |
|---|---|
| Power Input (+) | Connect to the positive terminal of the battery (e.g., LiPo battery). |
| Power Input (-) | Connect to the negative terminal of the battery (ground). |
| Motor Phase A | Connect to one of the three motor wires (no specific order). |
| Motor Phase B | Connect to one of the three motor wires (no specific order). |
| Motor Phase C | Connect to one of the three motor wires (no specific order). |
| Signal Input | Receives control signals (PWM, DShot, or Multishot) from the flight controller or receiver. |
| Ground (GND) | Ground connection for the signal input. |
Usage Instructions
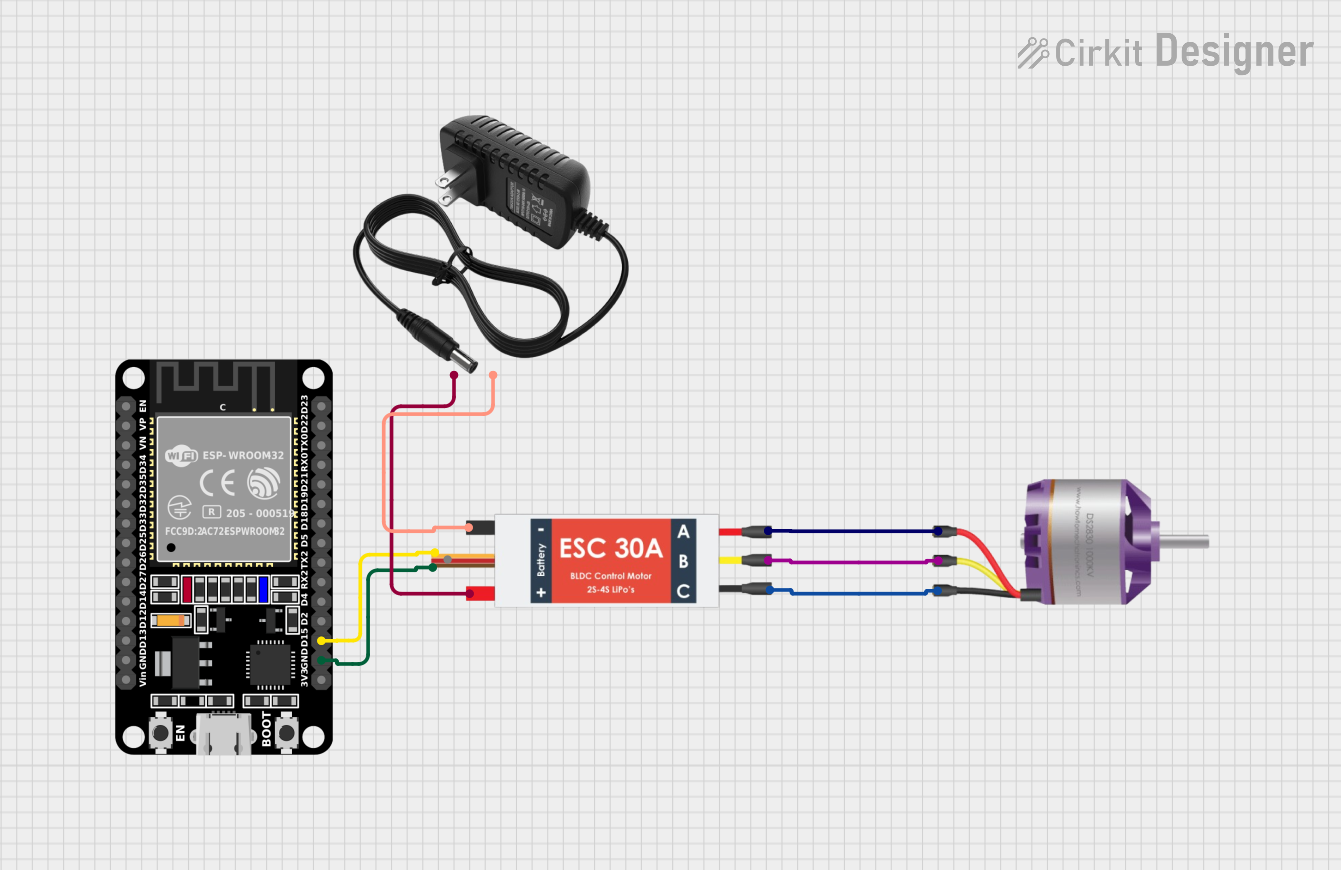
How to Use the AM32 ESC in a Circuit
- Connect the Power Supply:
- Attach the positive and negative terminals of a compatible LiPo battery (2S–6S) to the ESC's power input pins.
- Connect the Motor:
- Connect the three motor wires to the ESC's motor phase outputs (A, B, C). The order does not matter initially; you can swap two wires if the motor spins in the wrong direction.
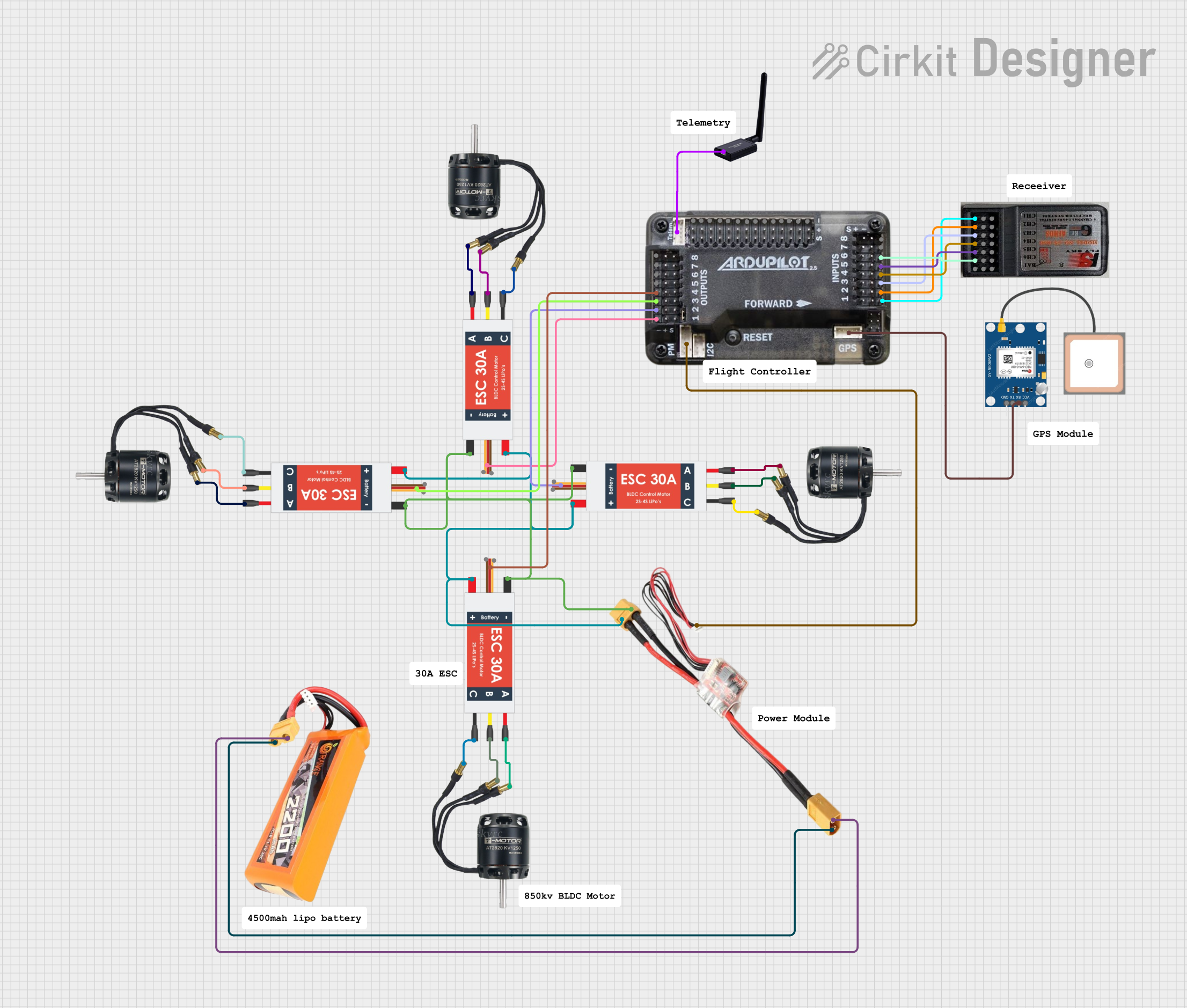
- Connect the Signal Input:
- Connect the signal input pin to the PWM, DShot, or Multishot output of your flight controller or receiver.
- Ensure the ground (GND) pin is also connected to the flight controller or receiver's ground.
- Calibrate the ESC (if required):
- Follow the calibration procedure specific to your transmitter and receiver to ensure proper throttle range.
- Secure the ESC:
- Mount the ESC securely in your vehicle or drone, ensuring adequate airflow for cooling.
Important Considerations
- Cooling: Ensure proper ventilation or cooling to prevent overheating during operation.
- Voltage Compatibility: Use a battery within the specified voltage range (2S–6S LiPo).
- Signal Type: Verify that your flight controller or receiver supports the signal type (PWM, DShot, or Multishot) used by the ESC.
- Firmware Updates: The AM32 firmware is open-source and can be updated for improved performance or additional features.
Example Code for Arduino UNO
If you are using the AM32 ESC with an Arduino UNO to control a brushless motor via PWM, the following code demonstrates how to send a PWM signal:
#include <Servo.h> // Include the Servo library for generating PWM signals
Servo esc; // Create a Servo object to control the ESC
void setup() {
esc.attach(9); // Attach the ESC signal wire to pin 9 on the Arduino
esc.writeMicroseconds(1000); // Send minimum throttle (1000 µs)
delay(2000); // Wait for 2 seconds to allow the ESC to initialize
}
void loop() {
esc.writeMicroseconds(1500); // Send a mid-throttle signal (1500 µs)
delay(5000); // Run the motor at mid-throttle for 5 seconds
esc.writeMicroseconds(1000); // Send minimum throttle to stop the motor
delay(5000); // Wait for 5 seconds before repeating
}
Note:
- Ensure the ESC is properly calibrated before running the code.
- The
writeMicroseconds()function sends a PWM signal in microseconds, where 1000 µs is typically the minimum throttle, and 2000 µs is the maximum throttle.
Troubleshooting and FAQs
Common Issues and Solutions
Motor Does Not Spin:
- Cause: Incorrect wiring or signal input.
- Solution: Verify all connections, ensure the ESC is receiving a valid signal, and check the throttle calibration.
Motor Spins in the Wrong Direction:
- Cause: Motor phase wires are connected in the wrong order.
- Solution: Swap any two of the three motor wires to reverse the direction.
ESC Overheats:
- Cause: Insufficient cooling or excessive current draw.
- Solution: Improve airflow around the ESC or reduce the motor load.
No Response from ESC:
- Cause: Incorrect signal type or firmware issue.
- Solution: Ensure the signal type matches the ESC's configuration and update the firmware if necessary.
FAQs
Can I use the AM32 ESC with a brushed motor?
- No, the AM32 ESC is designed specifically for brushless motors.
What happens if I exceed the 60A current rating?
- Exceeding the current rating may cause the ESC to overheat or fail. Use a motor and propeller combination that stays within the rated current.
How do I update the AM32 firmware?
- Firmware updates can be performed using a compatible programming tool and software. Refer to the AM32 firmware documentation for detailed instructions.
Is a BEC included in the AM32 ESC?
- No, the AM32 ESC does not include a BEC. You will need an external BEC or a separate power source for your receiver or flight controller.
By following this documentation, you can effectively integrate and operate the AM32 ESC in your projects.